农业农村部主管 农业农村部南京农业机械化研究所主办
ISSN 2096-7217 CN 32-1887/S2
智能化农业装备学报(中英文) ›› 2025, Vol. 6 ›› Issue (2): 1-23.DOI: 10.12398/j.issn.2096-7217.2025.02.001
• •
收稿日期:2025-03-04
修回日期:2025-04-02
出版日期:2025-05-15
发布日期:2025-05-20
通讯作者:
汪小旵
作者简介:王得志,男,1998年生,山东烟台人,博士研究生;研究方向为农业机器人。E-mail: 2024212004@stu.njau.edu.cn
基金资助:
WANG Dezhi( ), WANG Yanxin, WANG Xiaochan(), SHI Yinyan, ZHANG Yongnian
), WANG Yanxin, WANG Xiaochan(), SHI Yinyan, ZHANG Yongnian
Received:2025-03-04
Revised:2025-04-02
Online:2025-05-15
Published:2025-05-20
Contact:
WANG Xiaochan
About author:WANG Dezhi, E-mail: 2024212004@stu.njau.edu.cn
Supported by:摘要:
农业机器人是现代农业发展的重要方向,已经成为全球农业装备技术竞争的战略高地。作为特种机器人技术的重要分支,农业机器人的核心结构包括信息感知系统、决策控制系统、作业执行机构和自主移动平台,经历了从半自动化到智能化的多个发展阶段。为了准确把握农业机器人的研究现状和发展方向,本研究阐述了农业机器人的概念、国内外发展政策及技术背景。农业管理机器人和采摘机器人是农业机器人领域的两大核心方向,管理机器人通过实时监测作物生长状况及环境条件,实现对生产管理操作的精准调控。采摘机器人则通过自主导航、智能识别和精准控制技术,自动执行作物采摘任务。本研究重点探讨了信息采集机器人、授粉机器人、除草机器人、植保机器人和打叶整枝机器人等管理类机器人,以及水果、蔬菜、花卉和茶叶等采摘机器人的前沿进展、技术瓶颈和关键突破方向。结合我国农业的具体需求和特点,深入分析了农业机器人的技术瓶颈和关键突破方向,包括精准信息感知和识别、实时数据处理与智能决策、自适应底盘路径规划与自主导航、作业执行机构设计与精准作业控制等。展望农业机器人将在作物管理、病虫害防治和采摘等领域实现广泛应用,加速迈向智能化、精准化和自主化阶段。依托先进技术解决农业生产中的挑战,推动农业劳动力优化、生产效率提升,成为智慧农业的关键支撑。
中图分类号:
王得志, 王延鑫, 汪小旵, 施印炎, 章永年. 农业机器人中的管理与采摘技术:现状、挑战与未来发展[J]. 智能化农业装备学报(中英文), 2025, 6(2): 1-23.
WANG Dezhi, WANG Yanxin, WANG Xiaochan, SHI Yinyan, ZHANG Yongnian. Management and harvesting technologies in agricultural robotics: Current status, challenges and future developments[J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 1-23.

图1 农业管理与采摘机器人分类
Figure 1 Agricultural management and harvesting robot classification

图2 国外典型信息采集机器人
Figure 2 Typical information acquisition robots abroad

图3 国内典型信息采集机器人
Figure 3 Typical information acquisition robots in China

图4 国外典型授粉机器人
Figure 4 Typical pollinator robot abroad

图5 国内典型授粉机器人
Figure 5 Typical pollination robots in China

图6 国外典型除草机器人
Figure 6 Typical weeding robots abroad

图7 国内典型除草机器人
Figure 7 Typical weeding robots in China
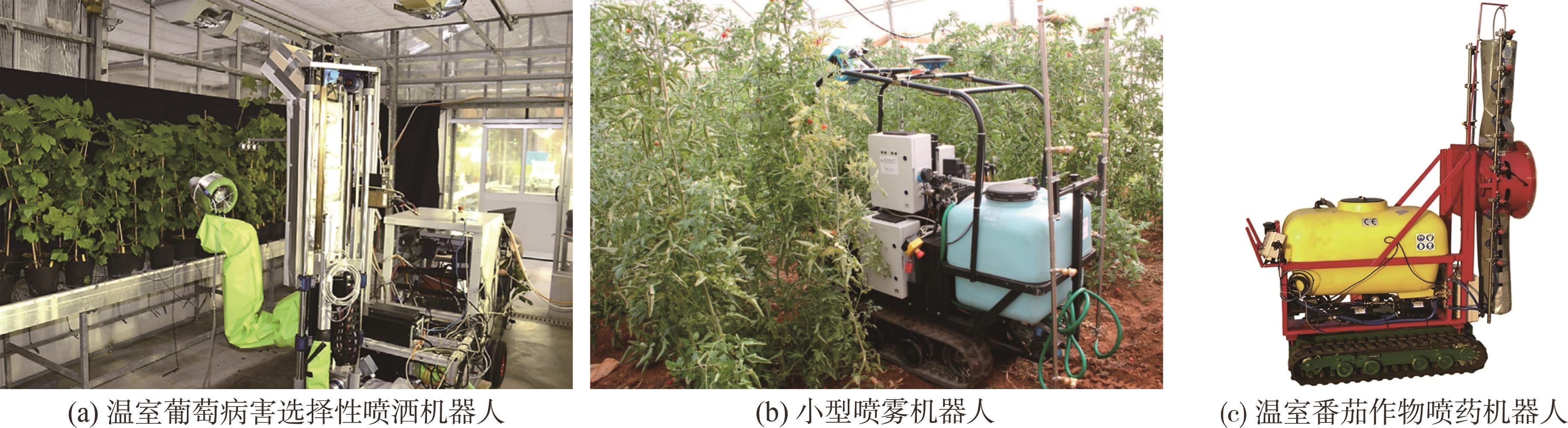
图8 国外典型植保机器人
Figure 8 Typical plant protection robots abroad
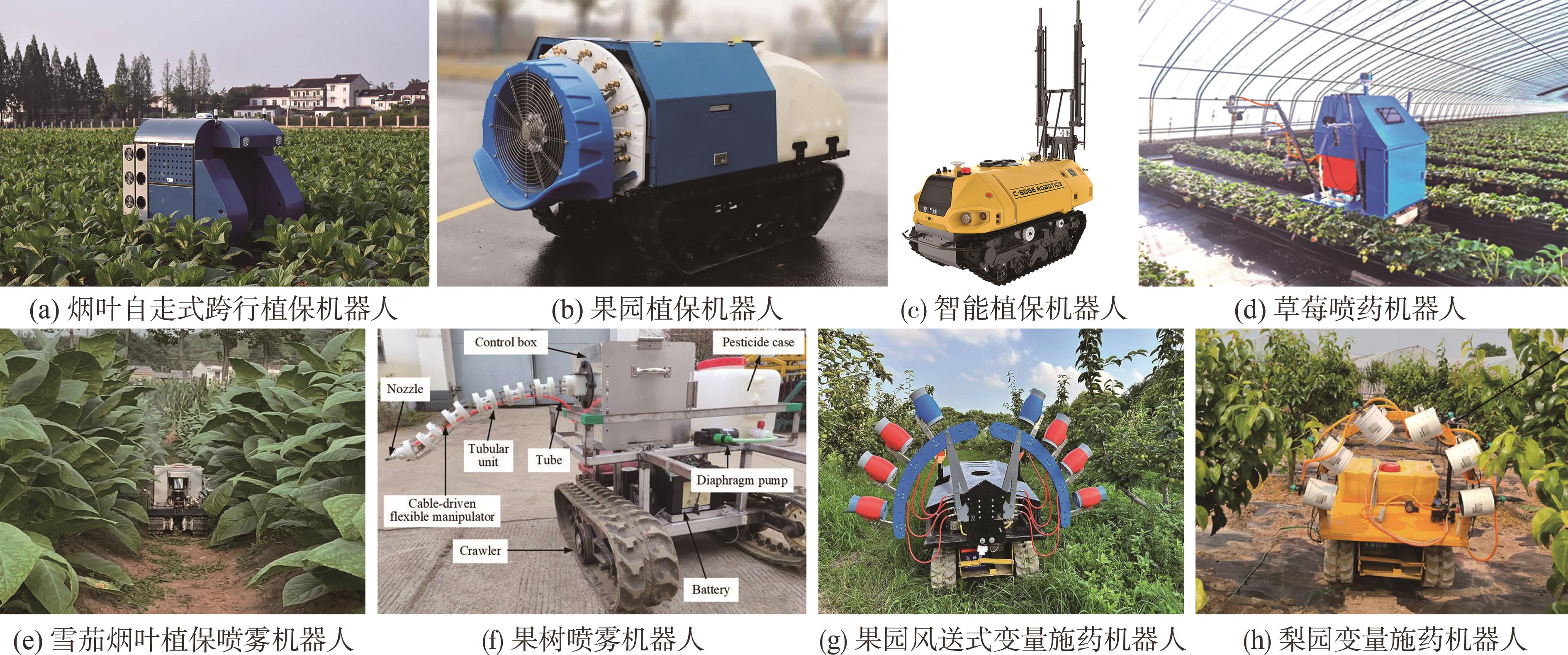
图9 国内典型植保机器人
Figure 9 Typical plant protection robots in China

图10 植保无人机
Figure 10 Plant protection drones

图11 国外典型打叶整枝机器人
Figure 11 Typical leaf pruning robots abroad

图12 国内典型打叶整枝机器人
Figure 12 Typical leaf pruning robots in China
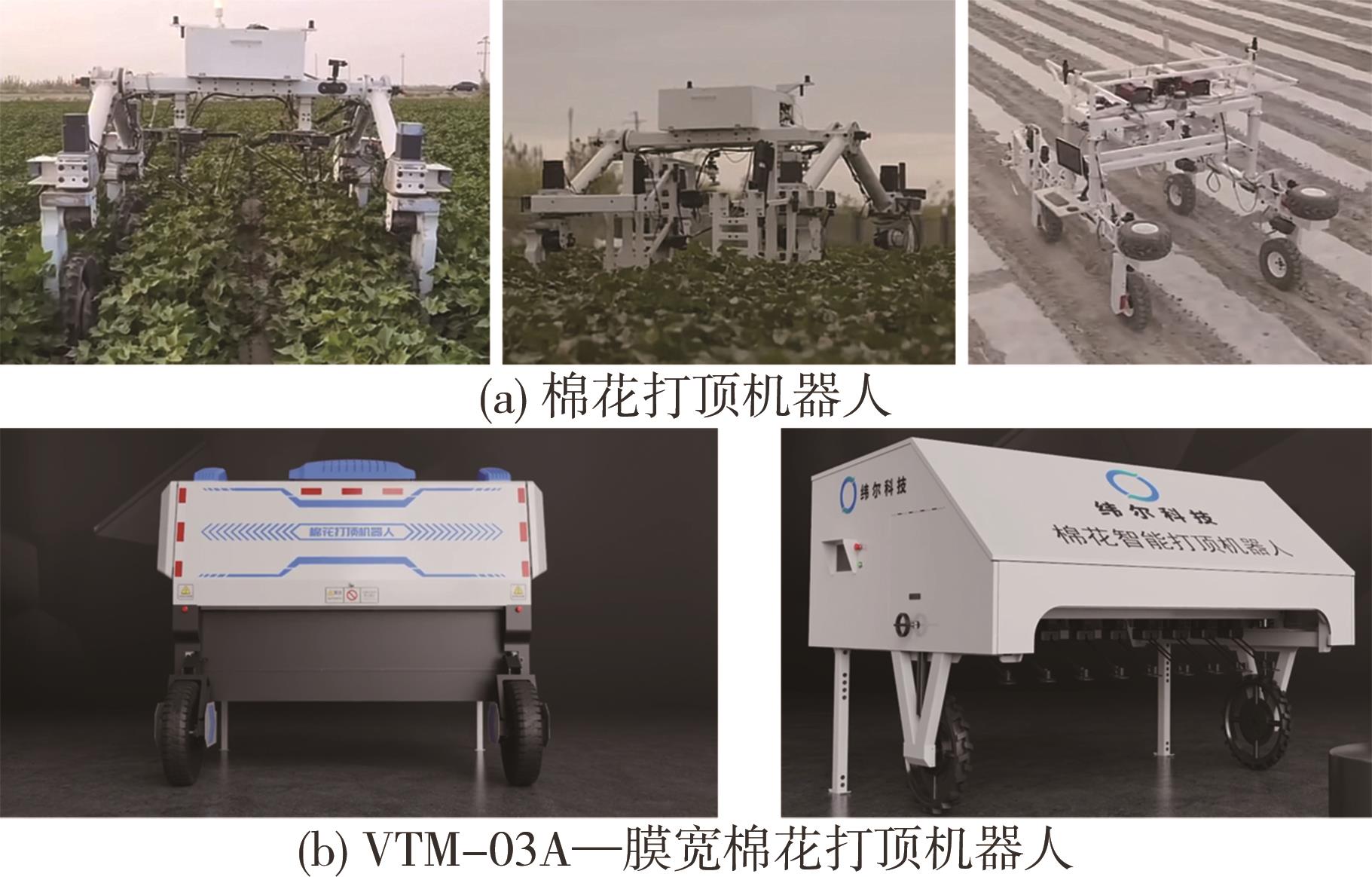
图13 棉花打顶机器人
Figure 13 Cotton topping robots
| 机器人类型 | 作业任务 | 关键技术 | 优点 | 缺点 |
|---|---|---|---|---|
| 信息采集机器人 | 收集土壤理化性质、气象变化、作物生长及病虫害等数据 | 多传感器融合、数据处理、自主导航 | 获取多维度数据,为精准农业提供决策依据;提高数据采集效率和准确性 | 复杂环境下传感器易受干扰;数据处理与分析难度大 |
| 授粉机器人 | 实现作物授粉自动化,提高授粉效率和果实质量 | 花朵识别与定位、末端执行器设计与控制、自主导航 | 提高授粉效率和产量;避免病害传播风险 | 不同花期花朵识别难度大;末端执行器授粉方式有限 |
| 除草机器人 | 识别和清除农田中的杂草 | 作物与杂草识别、路径规划、杂草清除操作 | 减少农药使用;降低杂草竞争,提高作物产量 | 作物与杂草识别准确率受环境影响;部分除草方式有可能损伤作物 |
| 植保机器人 | 自动精准完成病虫害防治、农药喷洒等任务 | 病虫害识别、农药精准喷洒、自主导航 | 精准施药,减少农药浪费;有效控制病虫害扩散 | 病虫害识别精度有待提高;农药喷洒均匀性和覆盖性需优化 |
| 打叶整枝机器人 | 根据植物生长状态进行打叶整枝操作 | 枝叶识别与定位、作业执行机构设计与控制、路径规划 | 促进植物生长;提高光照和空气流通 | 不同作物枝叶形态位姿估计算法复杂;作业执行机构设计难度大 |
表1 农业管理机器人对比分析
Table 1 Comparative analysis of agricultural management robots
| 机器人类型 | 作业任务 | 关键技术 | 优点 | 缺点 |
|---|---|---|---|---|
| 信息采集机器人 | 收集土壤理化性质、气象变化、作物生长及病虫害等数据 | 多传感器融合、数据处理、自主导航 | 获取多维度数据,为精准农业提供决策依据;提高数据采集效率和准确性 | 复杂环境下传感器易受干扰;数据处理与分析难度大 |
| 授粉机器人 | 实现作物授粉自动化,提高授粉效率和果实质量 | 花朵识别与定位、末端执行器设计与控制、自主导航 | 提高授粉效率和产量;避免病害传播风险 | 不同花期花朵识别难度大;末端执行器授粉方式有限 |
| 除草机器人 | 识别和清除农田中的杂草 | 作物与杂草识别、路径规划、杂草清除操作 | 减少农药使用;降低杂草竞争,提高作物产量 | 作物与杂草识别准确率受环境影响;部分除草方式有可能损伤作物 |
| 植保机器人 | 自动精准完成病虫害防治、农药喷洒等任务 | 病虫害识别、农药精准喷洒、自主导航 | 精准施药,减少农药浪费;有效控制病虫害扩散 | 病虫害识别精度有待提高;农药喷洒均匀性和覆盖性需优化 |
| 打叶整枝机器人 | 根据植物生长状态进行打叶整枝操作 | 枝叶识别与定位、作业执行机构设计与控制、路径规划 | 促进植物生长;提高光照和空气流通 | 不同作物枝叶形态位姿估计算法复杂;作业执行机构设计难度大 |

图14 草莓采摘机器人
Figure 14 Strawberry picking robots
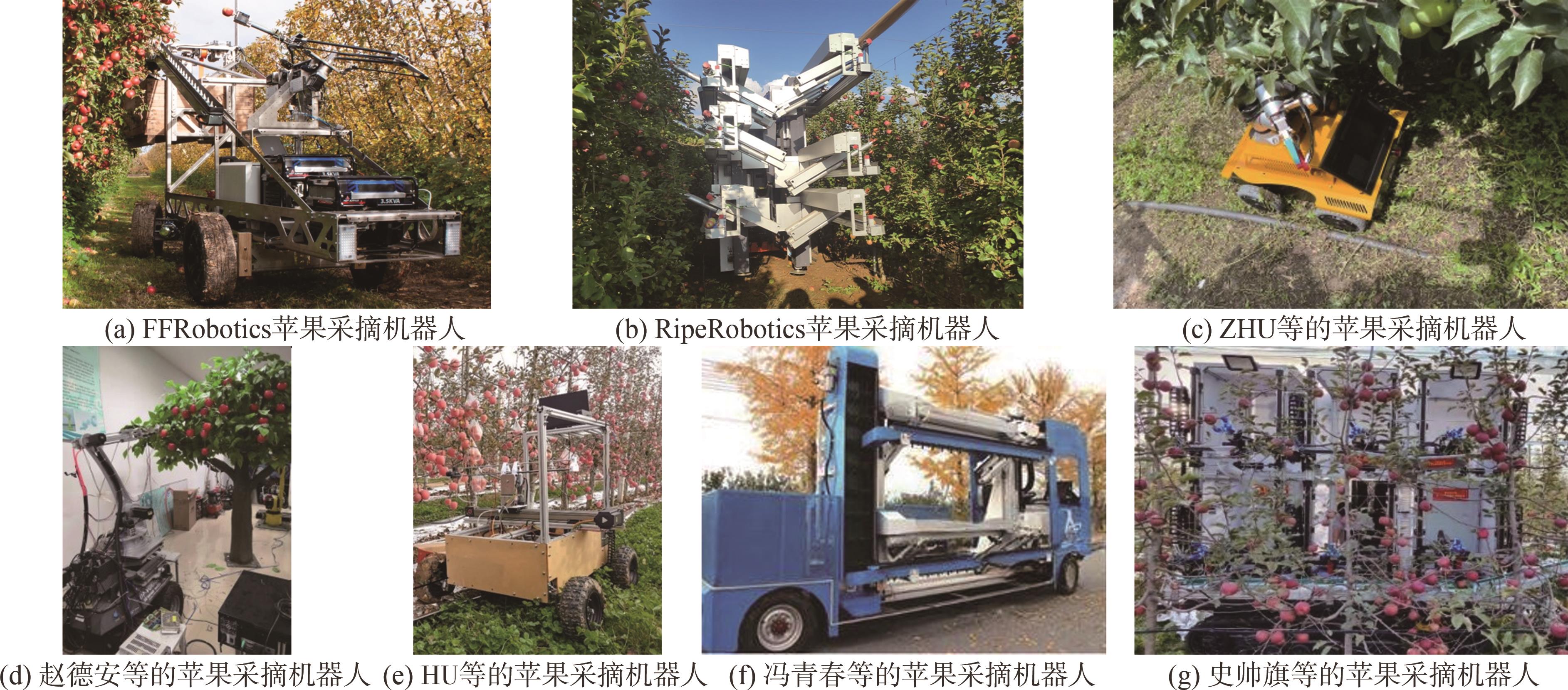
图15 苹果采摘机器人
Figure 15 Apple picking robots

图16 柑橘采摘机器人
Figure 16 Citrus picking robots

图17 猕猴桃采摘机器人
Figure 17 Kiwi fruit picking robots

图18 荔枝采摘机器人
Figure 18 Litchi picking robots
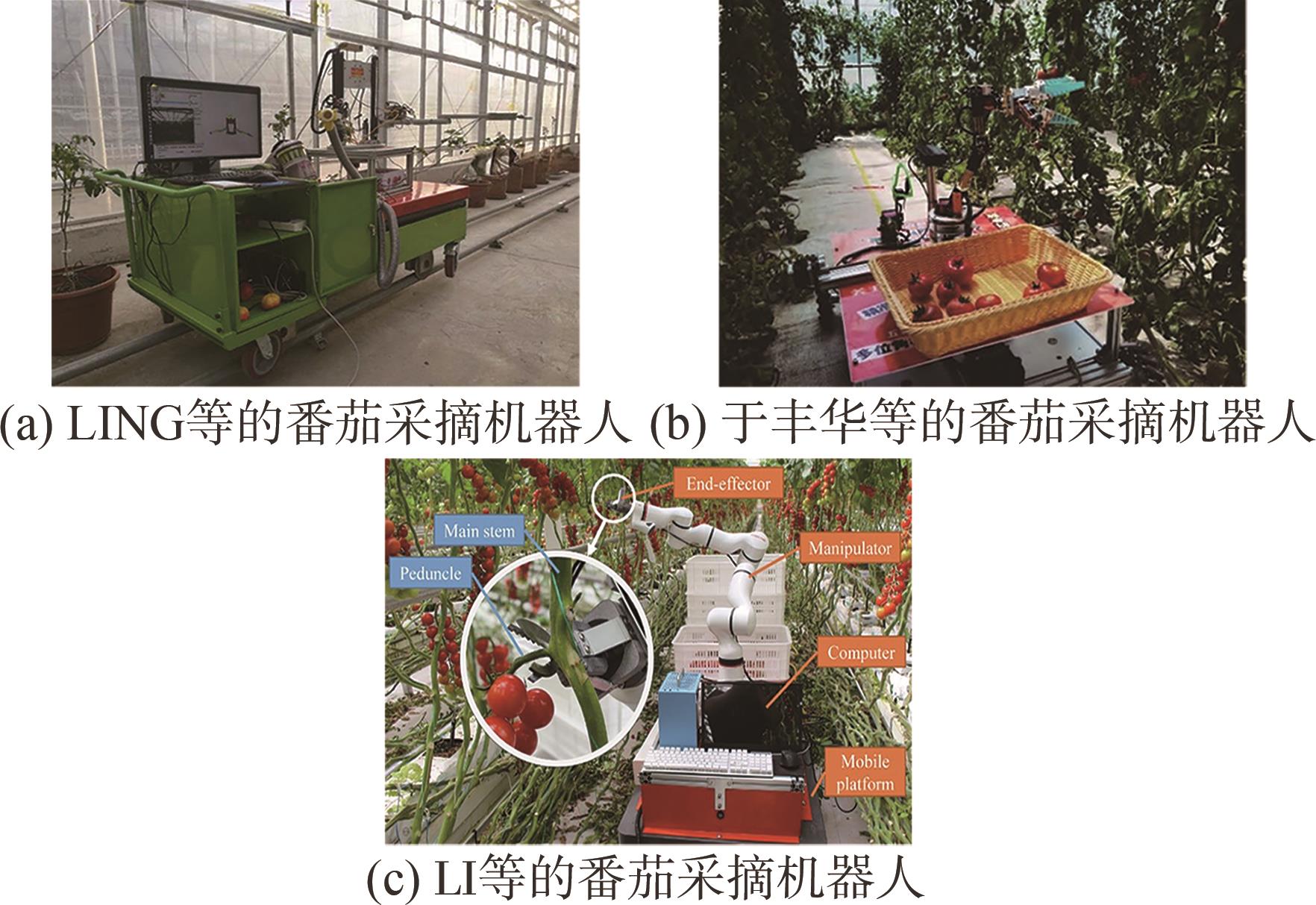
图19 番茄采摘机器人
Figure 19 Tomato picking robots
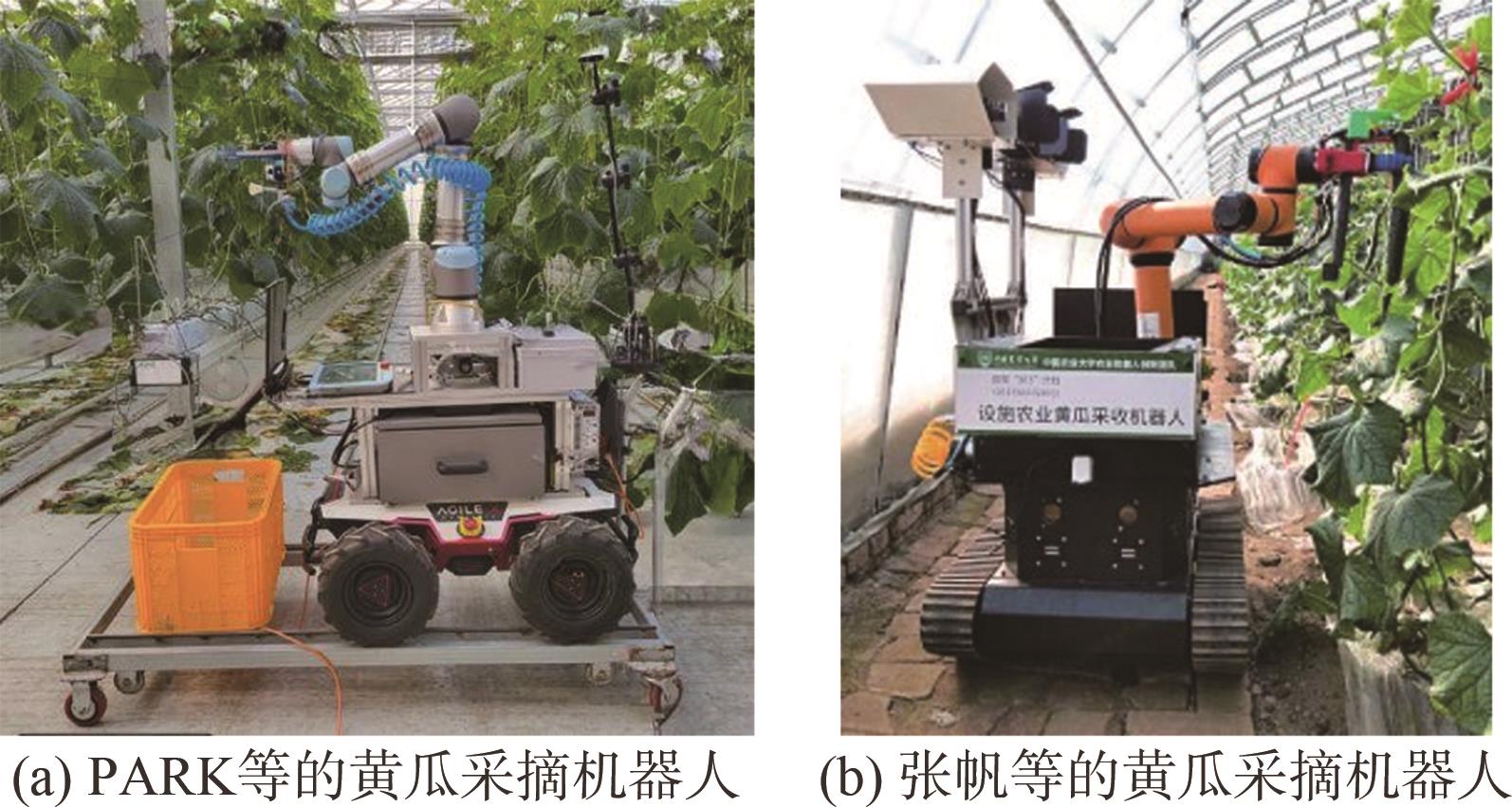
图20 黄瓜采摘机器人
Figure 20 Cucumber picking robots
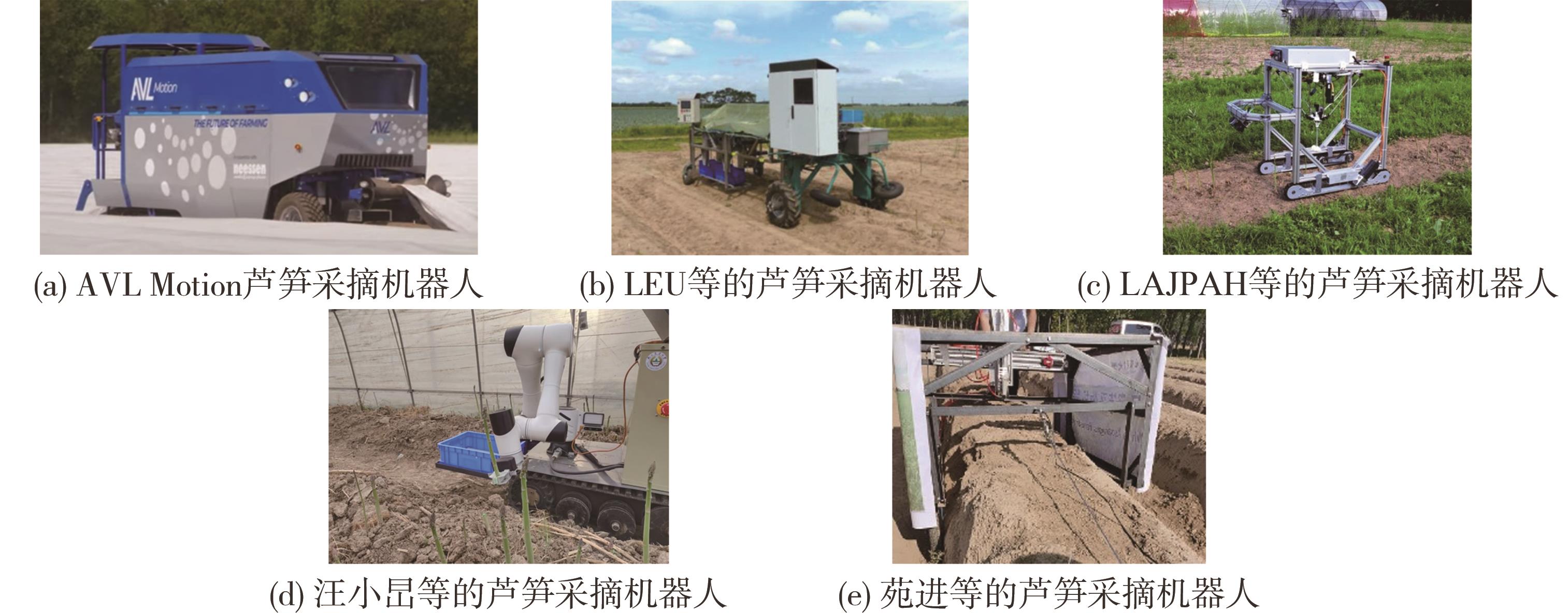
图21 芦笋采摘机器人
Figure 21 Asparagus picking robots
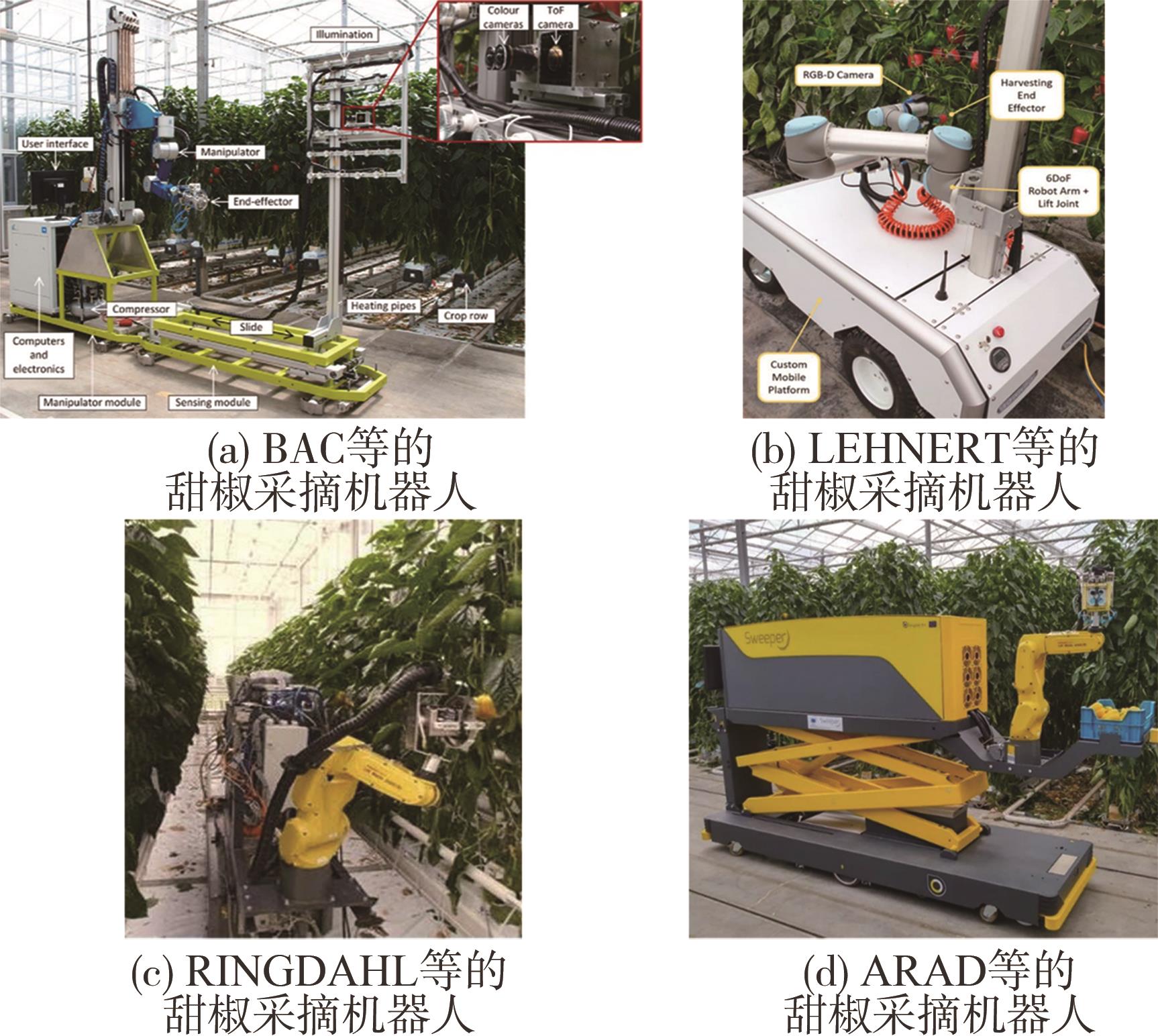
图22 甜椒采摘机器人
Figure 22 Sweet pepper picking robots
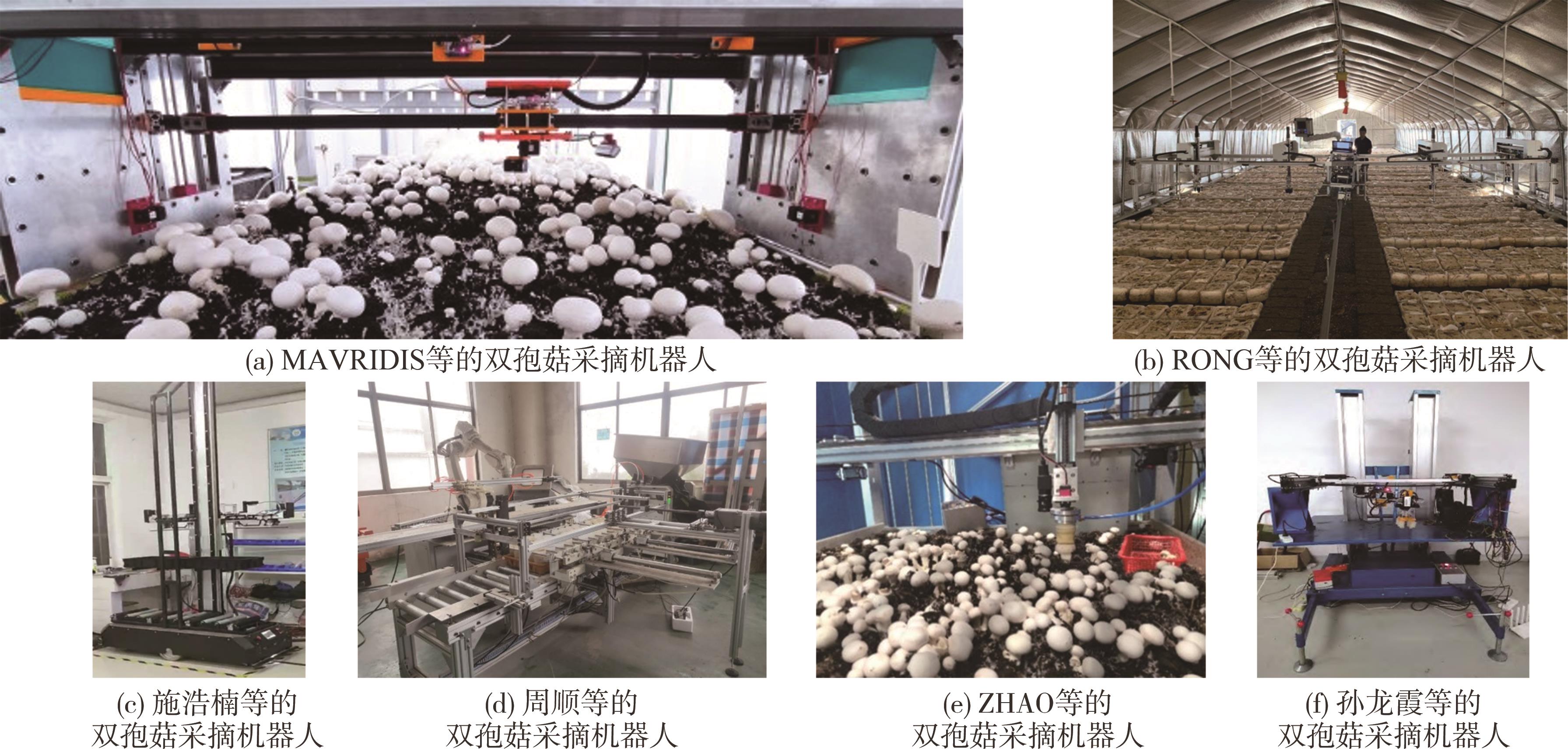
图23 食用菌采摘机器人
Figure 23 Edible mushrooms picking robots

图24 花卉采摘机器人
Figure 24 Flowers picking robots

图25 茶叶采摘机器人
Figure 25 Tea picking robots
| 机器人类型 | 关键技术 | 优点 | 缺点 |
|---|---|---|---|
水果采摘 机器人 | 果实识别与定位、末端执行器设计与控制、导航与路径规划 | 提高采摘效率 | 果实识别准确率受遮挡和成熟度影响;末端执行器对不同水果适应性有限 |
蔬菜采摘 机器人 | 视觉识别、运动规划、末端执行器控制 | 实现高效采摘; 人工劳动强度 | 对复杂环境适应性较弱;部分蔬菜采摘难度大,易造成损伤 |
| 食用菌采摘机器人 | 目标检测与定位、柔性末端执行器设计 | 提高采摘效率和质量 | 对食用菌生长环境要求较高,识别难度大 |
花卉采摘 机器人 | 视觉定位、机械臂运动控制 | 保证花卉采摘质量; 提高采摘效率 | 对花卉形态和生长环境要求较高 |
| 名优茶采摘机器人 | 茶叶识别与定位、采摘路径规划、末端执行器设计 | 提高采摘效率; 保证茶叶品质 | 茶叶生长环境复杂,对茶叶嫩芽识别精度要求高 |
表2 农业采摘机器人对比分析
Table 2 Comparative analysis of agricultural harvesting robots
| 机器人类型 | 关键技术 | 优点 | 缺点 |
|---|---|---|---|
水果采摘 机器人 | 果实识别与定位、末端执行器设计与控制、导航与路径规划 | 提高采摘效率 | 果实识别准确率受遮挡和成熟度影响;末端执行器对不同水果适应性有限 |
蔬菜采摘 机器人 | 视觉识别、运动规划、末端执行器控制 | 实现高效采摘; 人工劳动强度 | 对复杂环境适应性较弱;部分蔬菜采摘难度大,易造成损伤 |
| 食用菌采摘机器人 | 目标检测与定位、柔性末端执行器设计 | 提高采摘效率和质量 | 对食用菌生长环境要求较高,识别难度大 |
花卉采摘 机器人 | 视觉定位、机械臂运动控制 | 保证花卉采摘质量; 提高采摘效率 | 对花卉形态和生长环境要求较高 |
| 名优茶采摘机器人 | 茶叶识别与定位、采摘路径规划、末端执行器设计 | 提高采摘效率; 保证茶叶品质 | 茶叶生长环境复杂,对茶叶嫩芽识别精度要求高 |
| 1 | 刘成良, 贡亮, 苑进, 等. 农业机器人关键技术研究现状与发展趋势[J]. 农业机械学报, 2022, 53(7): 1-22, 55. |
| LIU Chengliang, GONG Liang, YUAN Jin, et al. Current status and development trends of agricultural robots [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(7): 1-22, 55. | |
| 2 | 赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15. |
| ZHAO Chunjiang, FAN Beibei, LI Jin, et al. Agricultural robots: Technology progress, challenges and trends [J]. Smart Agriculture, 2023, 5(4): 1-15. | |
| 3 | MUELLER-SIM T, JENKINS M, ABEL J, et al. The Robotanist: A ground-based agricultural robot for high-throughput crop phenotyping [C]. IEEE, 2017. |
| 4 | SHAFIEKHANI A, KADAM S, FRITSCHI F, et al. Vinobot and vinoculer: Two robotic platforms for high-throughput field phenotyping [J]. Sensors, 2017, 17(1): 214. |
| 5 | ZHANG Z, KAYACAN E, BENJAMIN T, et al. High precision control and deep learning-based corn stand counting algorithms for agricultural robot [J]. Autonomous Robots, 2020, 44(7): 1289-1302. |
| 6 | CUBERO S, MARCO-NOALES E, ALEIXOS N, et al. RobHortic: A field robot to detect pests and diseases in horticultural crops by proximal sensing [J]. Agriculture, 2020, 10(7): 276. |
| 7 | NGUYEN P, BADENHORST P E, SHI F, et al. Design of an unmanned ground vehicle and lidar pipeline for the high-throughput phenotyping of biomass in perennial ryegrass [J]. Remote Sensing, 2021, 13(1): 20. |
| 8 | XU R, LI C. A modular agricultural robotic system (MARS) for precision farming: Concept and implementation [J]. Journal of Field Robotics, 2022, 39(4): 387-409. |
| 9 | XU R, LI C. A review of high-throughput field phenotyping systems: Focusing on ground robots [J]. Plant Phenomics, 2022. |
| 10 | CHEN Y, WANG X, ZHANG X, et al. Spectral quantitative analysis and research of fusarium head blight infection degree in wheat canopy visible areas [J]. Agronomy, 2023, 13(3): 933. |
| 11 | 王楠, 李震, 李佳盟, 等. 智能型作物植株叶绿素检测系统设计与开发[J/OL]. 农业机械学报, 1-13[2025-03-01]. |
| WANG Nan, LI Zhen, LI Jiameng, et al. Design and development of intelligent plant chlorophyll index detection system [J]. Transactions of the Chinese Society for Agricultural Machinery, 1-13[2025-03-01]. | |
| 12 | XU N, SUN G, BAI Y, et al. Global reconstruction method of maize population at seedling stage based on kinect sensor [J]. Agriculture, 2023, 13(2): 348. |
| 13 | 孙国祥, 黄银锋, 汪小旵, 等. 基于LIO-SAM建图和激光视觉融合定位的温室自主行走系统[J]. 农业工程学报, 2024, 40(3): 227-239. |
| SUN Guoxiang, HUANG Yinfeng, WANG Xiaochan, et al. Autonomous navigation system in a greenhouse using LIO-SAM mapping and laser vision fusion localization [J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(3): 227-239. | |
| 14 | 李培艺, 汪小旵, 王延鑫, 等. 基于LiDAR多维点云优化的垄作菊花采摘机器人自主导航方法研究[J]. 南京农业大学学报, 2024, 47(04): 809-822. |
| LI Peiyi, WANG Xiaochan, WANG Yanxin, et al. Autonomous navigation system for chrysanthemum picking robot based on LiDAR multidimensional point cloud optimization [J]. Journal of Nanjing Agricultural University, 2024, 47(4): 809-822. | |
| 15 | 孟小前, 李俊磊, 胡伟, 等. 基于LiDAR数据与光谱影像融合的单木提取方法[J]. 农业机械学报, 2024, 55(1): 203-211. |
| MENG Xiaoqian, LI Junlei, HU Wei, et al. Single wood extraction method combining LiDAR data and spectral images [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(1): 203-211. | |
| 16 | 王宇唯, 马旭, 谭穗妍, 等. 无人机遥感与地面观测的多模态数据融合反演水稻氮含量[J]. 农业工程学报, 2024, 40(18): 100-109. |
| WANG Yuwei, MA Xu, TAN Suiyan, et al. Inverting rice nitrogen content with multimodal data fusion of unmanned aerial vehicle remote sensing and ground observations [J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(18): 100-109. | |
| 17 | 冯权泷, 任燕, 姚晓闯, 等. 基于多源光学雷达数据融合的黄淮海平原冬小麦识别[J]. 农业机械学报, 2023, 54(2): 160-168. |
| FENG Quanlong, REN Yan, YAO Xiaochuang, et al. Identification of winter wheat in Huang-Huai-Hai Plain based on multi-source optical radar data fusion [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(2): 160-168. | |
| 18 | QIU Q, FAN Z, MENG Z, et al. Extended ackerman steering principle for the coordinated movement control of a four wheel drive agricultural mobile robot [J]. Computers and Electronics in Agriculture, 2018, 152: 40-50. |
| 19 | QIU Q, SUN N, BAI H, et al. Field-based high-throughput phenotyping for maize plant using 3D lidar point cloud generated with a “phenomobile” [J]. Frontiers in Plant Science, 2019: 10. |
| 20 | 汪小旵, 李泽晟, 陈彦宇, 等. 高地隙农田信息采集机器人设计与试验[J]. 农业机械学报, 2023, 54(6): 65-77. |
| WANG Xiaochan, LI Zesheng, CHEN Yanyu, et al. Design and experiment of farmland Information collection robot [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(6): 65-77. | |
| 21 | Technology-Arugga AI Farming[EB/OL]. , 2024-11-24. |
| 22 | WILLIAMS H, NEJATI M, HUSSEIN S, et al. Autonomous pollination of individual kiwifruit flowers: Toward a robotic kiwifruit pollinator [J]. Journal of Field Robotics, 2020, 37(2): 246-262. |
| 23 | OHI N, LASSAK K, WATSON R,et al. Design of an autonomous precision pollination robot [C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).IEEE, 2018. |
| 24 | SMITH T, RIJAL M, TATSCH C, et al. Design of stickbug: A six-armed precision pollination robot [J]. 2024. |
| 25 | LI K, HUO Y, LIU Y, et al. Design of a lightweight robotic arm for kiwifruit pollination [J]. Computers and Electronics in Agriculture, 2022, 198: 107114. |
| 26 | GAO C, HE L, FANG W, et al. A novel pollination robot for kiwifruit flower based on preferential flowers selection and precisely target [J]. Computers and Electronics in Agriculture, 2023, 207: 107762. |
| 27 | WEI J, PAN Y, SUN L, et al. A novel redundant cooperative control strategy for robotic pollination [J]. Computers and Electronics in Agriculture, 2024, 220: 108846. |
| 28 | 文朝武, 龙洁花, 张宇, 等. 基于3D视觉的番茄授粉花朵定位方法[J]. 农业机械学报, 2022, 53(8): 320-328. |
| WEN Chaowu, LONG Jiehua, ZHANG Yu, et al. Positioning method of tomato pollination flowers based on 3D vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(8): 320-328. | |
| 29 | 赵春江, 文朝武, 林森, 等. 基于级联卷积神经网络的番茄花期识别检测方法[J]. 农业工程学报, 2020, 36(24): 143-152. |
| ZHAO Chunjiang, WEN Chaowu, LIN Sen, et al. Tomato florescence recognition and detection method based on cascaded neural network [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(24): 143-152. | |
| 30 | MCCOOL C S, BEATTIE J, FIRN J, et al. Efficacy of mechanical weeding tools: A study into alternative weed management strategies enabled by robotics [J]. IEEE Robotics and Automation Letters, 2018: 1184-1190. |
| 31 | UTSTUMO T, URDAL F, BREVIK A, et al. Robotic in-row weed control in vegetables [J]. Computers and Electronics in Agriculture, 2018, 154: 36-45. |
| 32 | Autonomous laser weeder demo unit-carbon robotics [EB/OL]. , 2024-11-24. |
| 33 | RAJA R, SU W, SLAUGHTER D C, et al. Real-time precision crop identification in high weed-density environments for robotic weed control using spectral fluorescence imaging in celery [J]. Computers and Electronics in Agriculture, 2025, 231: 110022. |
| 34 | SULZBACH E, SCHEEREN I, TORRES VERAS M S, et al. Deep learning model optimization methods and performance evaluation of YOLOv8 for enhanced weed detection in soybeans [J]. Computers and Electronics in Agriculture, 2025, 232: 110117. |
| 35 | 李恒达. 农田杂草鲜重检测模型与对靶施药系统[D]. 哈尔滨: 东北农业大学, 2022. |
| LI Hengda. Detection model of farmland weed fresh weight and target application system[D]. Harbin: Northeast Agricultural University, 2022. | |
| 36 | 姜伟. 面向复杂农田环境的损伤施药行内除草机器人研制[D]. 哈尔滨: 东北农业大学, 2022. |
| JIANG Wei. Development of an intra-row weeding robot for applying herbicides after injury in complex farmland environment [D]. Harbin: Northeast Agricultural University, 2022. | |
| 37 | OBERTI R, MARCHI M, TIRELLI P, et al. Selective spraying of grapevines for disease control using a modular agricultural robot [J]. Biosystems Engineering, 2016, 146: 203-215. |
| 38 | CANTELLI L, BONACCORSO F, LONGO D, et al. A small versatile electrical robot for autonomous spraying in agriculture [J]. Agri Engineering, 2019, 1(3): 391-402. |
| 39 | RINCÓN V J, GRELLA M, MARUCCO P, et al. Spray performance assessment of a remote-controlled vehicle prototype for pesticide application in greenhouse tomato crops [J]. Science of The Total Environment, 2020, 726: 138509. |
| 40 | 江苏岚江智能科技有限公司[EB/OL]. , 2024-11-24. |
| 41 | 廷捷智蜂—专业果园植保与智慧农业解决方案[EB/OL]. , 2024-11-24. |
| 42 | TAN H, ZHAO X, ZHAI C, et al. Design and experiments with a SLAM system for low-density canopy environments in greenhouses based on an improved cartographer framework [J]. Frontiers in Plant Science, 2024, 15. |
| 43 | 张青松, 陈志凌, 杜文斌, 等. 遥控自走式雪茄植株中下层烟叶植保喷雾机设计与试验[J]. 农业机械学报, 2024, 55(1): 122-133. |
| ZHANG Qingsong, CHEN Zhiling, DU Wenbin, et al. Design and experiment of novel sprayer for protecting middle and lower leaves of cigar tobacco plants [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(1): 122-133. | |
| 44 | BAO X, NIU Y, LI Y, et al. Design and kinematic analysis of cable-driven target spray robot for citrus orchards [J]. Applied Sciences, 2022, 12(18): 9379. |
| 45 | ZHANG J, YIN H, ZHOU L, et al. Variable rate air-assisted spray based on real-time disease spot identification [J]. Pest Management Science, 2023, 79(1): 402-414. |
| 46 | 极飞科技XAG: 提升农业生产效率[EB/OL]. , 2024-11-24. |
| 47 | DJI 大疆农业无人机-让农业更轻松,让生命更美好。[EB/OL]. , 2024-11-24. |
| 48 | 王志翀, HERBST A, BONDS J, 等. 植保无人机低空低量施药雾滴沉积飘移分布立体测试方法[J]. 农业工程学报, 2020, 36(4): 54-62. |
| WANG Zhichong, ANDREAS H, JANE B, et al. Stereoscopic test method for low-altitude and low-volume spraying deposition and drift distribution of plant protection UAV [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(4): 54-62. | |
| 49 | XU H, YI L, LI C, et al. Design and experiment of ecological plant protection UAV based on ozonated water spraying [J]. Drones, 2023, 7(5): 291. |
| 50 | 沈跃, 张凌飞, 沈亚运, 等. 基于相邻争夺算法的无人机多架次植保作业路径规划[J]. 农业工程学报, 2024, 40(16): 44-51. |
| SHEN Yue, ZHANG Lingfei, SHEN Yayun, et al. Path planning for the multiple drones plant protection operations of UAV based on adjacent contention algorithm [J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(16): 44-51. | |
| 51 | 姜锐, 周志艳, 徐岩, 等. 植保无人机药箱液量监测装置的设计与试验[J]. 农业工程学报, 2017, 33(12): 107-115. |
| JIANG Rui, ZHOU Zhiyan, XU Yan, et al. Design and experiment of liquid quantity monitor for pesticide tank in spraying UAV [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(12): 107-115. | |
| 52 | SILWAL A, YANDUN F, NELLITHIMARU A,et al.Bumblebee: A path towards fully autonomous robotic vine pruning [J]. arXiv e-prints, 2021. |
| 53 | WILLIAMS H, SMITH D, SHAHABI J, et al. Modelling wine grapevines for autonomous robotic cane pruning [J]. Biosystems Engineering, 2023, 235: 31-49. |
| 54 | ZAHID A, MAHMUD M S, HE L, et al. Development of an integrated 3R end-effector with a cartesian manipulator for pruning apple trees [J]. Computers and Electronics in Agriculture, 2020, 179: 105837. |
| 55 | CUEVAS-VELASQUEZ H, GALLEGO A J, TYLECEK R, et al.Real-time stereo visual servoing for rose pruning with robotic arm [J].Institute of Electrical and Electronics Engineers (IEEE), 2020. |
| 56 | HUANG C, CAI D, WANG W, et al. Development of an automatic control system for a hydraulic pruning robot [J]. Computers and Electronics in Agriculture, 2023, 214: 108329. |
| 57 | SONG P, CHEN K, ZHU L, et al. An improved cascade R-CNN and RGB-D camera-based method for dynamic cotton top bud recognition and localization in the field [J]. Computers and Electronics in Agriculture, 2022, 202: 107442. |
| 58 | 马丽娜, 徐扬杰, 罗承铭, 等. 茶园自走式修剪机接触式循垄导航系统设计与试验[J]. 农业工程学报, 2024, 40(16): 34-43. |
| MA Lina, XU Yangjie, LUO Chengming, et al. Design and experiment of the contact-style ridge-following navigation system for a tea garden self-propelled trimming machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(16): 34-43. | |
| 59 | 极飞科技XAG: 提升农业生产效率[EB/OL]. , 2024-11-24. |
| 60 | 纬尔科技:用科技赋能农业生产力[EB/OL]. , 2024-11-24. |
| 61 | OCTINION—Engineering the future [EB/OL]. , 2024-11-24. |
| 62 | BERRY I'm, nice to meet you! [EB/OL]. , 2024-11-24. |
| 63 | HARVEST CROO ROBOTICS [EB/OL]. , 2024-11-24. |
| 64 | Harvesting Robots [EB/OL]. , 2024-11-24. |
| 65 | WANG D, WANG X, CHEN Y, et al. Strawberry ripeness classification method in facility environment based on red color ratio of fruit rind [J]. Computers and Electronics in Agriculture, 2023, 214: 108313. |
| 66 | 刘莫尘, 褚镇源, 崔明诗, 等. 基于改进YOLO v8-Pose的红熟期草莓识别和果柄检测[J]. 农业机械学报, 2023, 54(S2): 244-251. |
| LIU Mochen, CHU Zhenyuan, CUI Mingshi, et al. Red ripe strawberry recognition and stem detection based on improved YOLO v8-Pose [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(S2): 244-251. | |
| 67 | 杨珍, 龚惟新, 李凯, 等. 高架草莓的果实识别与果梗分割[J]. 农业工程学报, 2023, 39(17): 172-181. |
| YANG Zhen, GONG Weixin, LI Kai, et al. Fruit recognition and stem segmentation of the elevated planting of strawberries [J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(17): 172-181. | |
| 68 | FENG Q, CHEN J, ZHANG M, et al. Design and test of harvesting robot for table-top cultivated strawberry [C]// IEEE, 2019. |
| 69 | ZHANG Y, ZHANG K, YANG L, et al. Design and simulation experiment of ridge planting strawberry picking manipulator [J]. Computers and Electronics in Agriculture, 2023, 208: 107690. |
| 70 | DU X, CHENG H, MA Z, et al. DSW-YOLO: A detection method for ground-planted strawberry fruits under different occlusion levels [J]. Computers and Electronics in Agriculture, 2023, 214: 108304. |
| 71 | WANG F, URQUIZO R C, ROBERTS P, et al. Biologically inspired robotic perception-action for soft fruit harvesting in vertical growing environments [J]. Precision Agriculture, 2023, 24(3): 1072-1096. |
| 72 | XIONG Y, GE Y, FROM P J. An improved obstacle separation method using deep learning for object detection and tracking in a hybrid visual control loop for fruit picking in clusters [J]. Computers and Electronics in Agriculture, 2021, 191: 106508. |
| 73 | 杨震宇, 汪小旵, 祁子涵, 等. 基于改进YOLOv8的草莓识别与果梗采摘关键点检测[J]. 农业工程学报, 2024, 40(18): 167-175. |
| YANG Zhenyu, WANG Xiaochan, QI Zihan, et al. Recognizing strawberry to detect key points for peduncle picking using improved YOLOv8 model [J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(18): 167-175. | |
| 74 | FFRobotics [EB/OL]. , 2024-11-24. |
| 75 | RIPE ROBOTICS [EB/OL]. , 2024-11-24. |
| 76 | SILWAL A, DAVIDSON J R, KARKEE M, et al. Design, integration, and field evaluation of a robotic apple harvester [J]. Journal of Field Robotics, 2017, 34(6): 1140-1159. |
| 77 | ZHU F, ZHANG W, WANG S, et al. Apple-harvesting robot based on the YOLOv5-RACF model [J]. Biomimetics, 2024, 9(8): 495. |
| 78 | 赵德安, 吴任迪, 刘晓洋, 等. 气电混合驱动全天候苹果收获机器人设计与试验[J]. 农业机械学报, 2020, 51(2): 21-28, 36. |
| ZHAO Dean, WU Rendi, LIU Xiaoyang, et al. Design and experiment of apple harvesting robot based on gas-electric hybrid drive [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(2): 21-28, 36. | |
| 79 | HU G, CHEN C, CHEN J, et al. Simplified 4-DOF manipulator for rapid robotic apple harvesting [J]. Computers and Electronics in Agriculture, 2022, 199. |
| 80 | 冯青春, 赵春江, 李涛, 等. 苹果四臂采摘机器人系统设计与试验[J]. 农业工程学报, 2023, 39(13): 25-33. |
| FENG Qingchun, ZHAO Chunjiang, LI Tao, et al. Design and test of a four-arm apple harvesting robot [J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(13): 25-33. | |
| 81 | 史帅旗, 杨福增, 刘志杰, 等. 复合气动式苹果采摘手设计与试验[J]. 农业机械学报, 2024, 55(10): 93-105. |
| SHI Shuaiqi, YANG Fuzeng, LIU Zhijie, et al. Design and experiment of composite pneumatic apple picking manipulator [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(10): 93-105. | |
| 82 | 江自真, 周俊, 韩宏琪, 等. 基于RANSAC拟合点云去噪的苹果采摘位姿构建方法[J]. 农业机械学报, 2024, 55(10): 72-81. |
| JIANG Zizhen, ZHOU Jun, HAN Hongqi, et al. Apple picking pose establishment based on filtering point-cloud noise by RANSAC fitting [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(10): 72-81. | |
| 83 | Nanovel [EB/OL]. , 2024-11-24. |
| 84 | 刘静, 林冲, 郭世财, 等. 柑橘类水果采摘机器的设计与研究[J]. 包装工程, 2019, 40(17): 56-62. |
| LIU Jing, LIN Chong, GUO Shicai, et al. Design and research of citrus fruit picking machine [J]. Packaging Engineering, 2019, 40(17): 56-62. | |
| 85 | TANG Z, XU L, WANG Y, et al. Collision-free motion planning of a six-link manipulator used in a citrus picking robot [J]. Applied Sciences, 2021, 11(23): 11336. |
| 86 | YIN H, SUN Q, REN X, et al. Development, integration, and field evaluation of an autonomous citrus-harvesting robot [J]. Journal of Field Robotics, 2023, 40(6): 1363-1387. |
| 87 | 鲍秀兰, 马志涛, 马萧杰, 等. 丘陵果园自然环境下柑橘采摘机器人设计与试验[J]. 农业机械学报, 2024, 55(4): 124-135. |
| BAO Xiulan, MA Zhitao, MA Xiaojie, et al. Design and experiment of citrus picking robot in hilly orchard natural environment [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(4): 124-135. | |
| 88 | 王毅, 许洪斌, 张茂, 等. 仿蛇嘴咬合式柑橘采摘末端执行器设计与实验[J]. 农业机械学报, 2018, 49(10): 54-64. |
| WANG Yi, XU Hongbin, ZHANG Mao, et al. Design and experiment of bite-model end-effector for citrus harvesting by simulating with mouth of snake [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(10): 54-64. | |
| 89 | XIAO X, WANG Y, ZHOU B, et al. Flexible hand claw picking method for citrus-picking robot based on target fruit recognition [J]. Agriculture, 2024, 14(8): 1227. |
| 90 | WILLIAMS H A M, JONES M H, NEJATI M, et al. Robotic kiwifruit harvesting using machine vision, convolutional neural networks, and robotic arms [J]. Biosystems Engineering, 2019, 181: 140-156. |
| 91 | MA L, HE Z, ZHU Y, et al. A method of grasping detection for kiwifruit harvesting robot based on deep learning [J]. Agronomy, 2022, 12(12): 3096. |
| 92 | WANG Y, HE Z, CAO D, et al. Coverage path planning for kiwifruit picking robots based on deep reinforcement learning [J]. Computers and Electronics in Agriculture, 2023, 205: 107593. |
| 93 | 王佳虹, 王迪, 叶宏宝, 等. 猕猴桃采摘机器人设计及试验[J]. 浙江农业科学, 2023, 64(10): 2418-2422. |
| WANG Jiahong, WANG Di, YE Hongbao, et al. Design and experiment of kiwi fruit picking robot [J]. Journal of Zhejiang Agricultural Sciences, 2023, 64(10): 2418-2422. | |
| 94 | XIONG J, HE Z, LIN R, et al. Visual positioning technology of picking robots for dynamic litchi clusters with disturbance [J]. Computers and Electronics in Agriculture, 2018, 151: 226-237. |
| 95 | LI J, TANG Y, ZOU X, et al. Detection of fruit-bearing branches and localization of litchi clusters for vision-based harvesting robots [J]. IEEE Access, 2020, 8: 117746-117758. |
| 96 | WANG C, LI C, HAN Q, et al. A performance analysis of a litchi picking robot system for actively removing obstructions, using an artificial intelligence algorithm [J]. Agronomy, 2023, 13(11): 2795. |
| 97 | LING X, ZHAO Y, GONG L, et al. Dual-arm cooperation and implementing for robotic harvesting tomato using binocular vision [J]. Robotics and Autonomous Systems, 2019, 114: 134-143. |
| 98 | 于丰华, 周传琦, 杨鑫, 等. 日光温室番茄采摘机器人设计与试验[J]. 农业机械学报, 2022, 53(1): 41-49. |
| YU Fenghua, ZHOU Chuanqi, YANG Xin, et al. Design and experiment of tomato picking robot in solar greenhouse [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(1): 41-49. | |
| 99 | LI Y, FENG Q, ZHANG Y, et al. Peduncle collision-free grasping based on deep reinforcement learning for tomato harvesting robot [J]. Computers and Electronics in Agriculture, 2024, 216: 108488. |
| 100 | GONG L, WANG W, WANG T, et al. Robotic harvesting of the occluded fruits with a precise shape and position reconstruction approach [J]. Journal of Field Robotics, 2022, 39(1): 69-84. |
| 101 | WANG L L, ZHAO B, FAN J W, et al. Development of a tomato harvesting robot used in greenhouse [J]. International Journal of Agricultural and Biological Engineering, 2017, 10(4): 140-149. |
| 102 | PARK Y, SEOL J, PAK J, et al. Human-centered approach for an efficient cucumber harvesting robot system: Harvest ordering, visual servoing, and end-effector [J]. Computers and Electronics in Agriculture, 2023, 212: 108116. |
| 103 | 张帆, 张帅辉, 张俊雄, 等. 温室黄瓜采摘机器人系统设计[J]. 农业工程技术, 2020, 40(25): 16-20. |
| ZHANG Fan, ZHANG Shuaihui, ZHANG Junxiong, et al. Design of greenhouse cucumber picking robot system [J]. Applied Engineering Technology, 2020, 40(25): 16-20. | |
| 104 | AVL Motion [EB/OL]. , 2024-11-24. |
| 105 | LEU A, RAZAVI M, LANGSTADTLER L, et al. Robotic Green Asparagus Selective Harvesting [J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2401-2410. |
| 106 | LAJPAH S, MUNIH M, MIHELJ M. Mobile robot system for selective asparagus harvesting [J]. Agronomy, 2023, 13(7): 1766. |
| 107 | 汪小旵, 李为民, 王琳, 等. 基于改进YOLACT++的成熟芦笋检测-判别-定位方法[J]. 农业机械学报, 2023, 54(7): 259-271. |
| WANG Xiaochan, LI Weimin, WANG Lin, et al. Method of detection-discrimination-localization for mature asparagus based on improved YOLACT++ algorithm [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(7): 259-271. | |
| 108 | 刘雪美, 杜帅, 苑进, 等. 白芦笋选择性收获机末端执行器作业分析与试验[J]. 农业机械学报, 2018, 49(4): 110-120. |
| LIU Xuemei, DU Shuai, YUAN Jin, et al. Analysis and experiment on selective harvesting mechanical end-effector of white asparagus [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(4): 110-120. | |
| 109 | ZHANG P, DAI N, LIU X, et al. A novel lightweight model HGCA-YOLO: Application to recognition of invisible spears for white asparagus robotic harvesting [J]. Computers and Electronics in Agriculture, 2024, 220: 108852. |
| 110 | BAC C W, HEMMING J, TUIJL B A J, et al. Performance evaluation of a harvesting robot for sweet pepper [J]. Journal of Field Robotics, 2017, 34(6): 1123-1139. |
| 111 | LEHNERT C, ENGLISH A, MCCOOL C, et al. Autonomous sweet pepper harvesting for protected cropping systems [J]. IEEE Robotics and Automation Letters, 2017, 2(2): 872-879. |
| 112 | RINGDAHL O, KURTSER P, EDAN Y. Evaluation of approach strategies for harvesting robots: Case study of sweet pepper harvesting [J]. Journal of Intelligent & Robotic Systems, 2019, 95(1): 149-164. |
| 113 | ARAD B, BALENDONCK J, BARTH R, et al. Development of a sweet pepper harvesting robot [J]. Journal of Field Robotics, 2020, 37(6): 1027-1039. |
| 114 | POLIC M, TABAK J, ORSAG M. Pepper to fall: A perception method for sweet pepper robotic harvesting [J]. Intelligent Service Robotics, 2022, 15(2): 193-201. |
| 115 | 汪龙. 基于卷积神经网络的语义分割算法研究及其在甜椒图像识别中的应用[D]. 镇江: 江苏大学, 2021. |
| WANG Long. Research of semantic segmentation algorithm based on convolution neural network and its application in image recognition of sweet pepper [D]. Zhenjiang: Jiangsu University, 2021. | |
| 116 | MAVRIDIS P, MAVRIKIS N, MASTROGEORGIOU A, et al. Low-cost, accurate robotic harvesting system for existing mushroom farms [C]. IEEE, 2023. |
| 117 | RONG J, WANG P, YANG Q, et al. A field-tested harvesting robot for oyster mushroom in greenhouse [J]. Agronomy, 2021, 11(6): 1210. |
| 118 | 施浩楠. 移动式仿人双孢菇采摘机器人设计[D]. 南京: 南京农业大学, 2021. |
| SHI Haonan. Design of mobile robot for picking bisporus mushroom [D]. Nanjing: Nanjing Agricultural University, 2021. | |
| 119 | 周顺. 面向工厂化生产的瓶栽白玉菇采收装置设计与试验[D]. 泰安: 山东农业大学, 2023. |
| ZHOU Shun. Design and test of the bottle-planted white hypsizygus marmoreus harvesting device for factory production [D]. Tai'an: Shandong Agricultural University, 2023. | |
| 120 | ZHAO K, LI H, JI J, et al. Pressure-stabilized flexible end-effector for selective picking of agaricus bisporus [J]. Agriculture, 2023, 13(12): 2256. |
| 121 | 孙龙霞, 吕宁, 於锋, 等. 蘑菇采摘机器人的结构设计及优化[J]. 江苏大学学报(自然科学版), 2024, 45(3): 295-301. |
| SUN Longxia, Ning LÜ, YU Feng, et al. Structure design and optimization of mushroom picking robot [J]. Journal of Jiangsu University(Natural Science Edition), 2024, 45(3): 295-301. | |
| 122 | Vision+Robotics [EB/OL]. , 2024-11-24. |
| 123 | 新疆莎车县:“机器人”进田地 解农户“采摘之忧”[EB/OL]. , 2024-11-24. |
| 124 | 科技把控未来 犍小茉第三代茉莉花采摘机器人荣耀面市[EB/OL]. , 2024-11-24. |
| 125 | 陈飞, 葛云, 张立新, 等. 红花采摘机器人集条预定位机构设计与试验[J]. 农业工程学报, 2021, 37(15): 10-19. |
| CHEN Fei, GE Yun, ZHANG Lixin, et al. Design and experiment of the strip-collected pre-positioning mechanism for safflower picking robots [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(15): 10-19. | |
| 126 | 郭辉, 陈海洋, 高国民, 等. 基于YOLOv5m的红花花冠目标检测与空间定位方法[J]. 农业机械学报, 2023, 54(7): 272-281. |
| GUO Hui, CHEN Haiyang, GAO Guomin, et al. Safflower corolla object detection and spatial positioning methods based on YOLOv5m [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(7): 272-281. | |
| 127 | 王延鑫, 汪小旵, 李培艺, 等. 包络式金丝皇菊采摘机械手设计与试验优化[J]. 南京农业大学学报, 1-18[2025-03-03]. |
| WANG Yanxin, WANG Xiaochan, LI Peiyi, et al. Design and experimental optimization of an enveloping golden chrysanthemum harvesting manipulator [J]. Journal of Nanjing Agricultural University, 1-18[2025-03-03]. | |
| 128 | 陶澄宇. 自主采茶机器人的茶叶剪切位置视觉识别及导引研究[D]. 上海: 上海交通大学, 2021. |
| TAO Chengyu. Visual recognition and guidance of tea cutting position for autonomous tea picking robot [D]. Shanghai: Shanghai Jiao Tong University, 2021. | |
| 129 | XU L, XIE Y, CHEN X, et al. Design of an efficient combined multipoint picking scheme for tea buds [J]. Frontiers in Plant Science, 2022, 13. |
| 130 | 李亚涛. 茶叶采摘机器人的视觉检测与定位技术研究[D]. 杭州: 浙江理工大学, 2022. |
| LI Yatao. Research on the visual detection and localization technology of tea harvesting robot [D]. Hangzhou: Zhejiang Sci-Tech University, 2022. | |
| 131 | 蒋宗祥. 多臂协同的名优茶单芽精准采摘机器人研究 [D]. 泰安: 山东农业大学, 2022. |
| JIANG Zongxiang. Research on the precise picking robot of high-quality tea sprout with multi-arm coordination [D]. Tai'an: Shandong Agricultural University, 2022. | |
| 132 | LIN G, XIONG J, ZHAO R, et al. Efficient detection and picking sequence planning of tea buds in a high-density canopy [J]. Computers and Electronics in Agriculture, 2023, 213: 108213. |
| 133 | WU Y, CHEN J, WU S, et al. An improved YOLOv7 network using RGB-D multi-modal feature fusion for tea shoots detection [J]. Computers and Electronics in Agriculture, 2024, 216: 108541. |
| 134 | WU L, LIU H, YE C, et al. Development of a premium tea-picking robot incorporating deep learning and computer vision for leaf detection [J]. Applied Sciences, 2024, 14(13): 5748. |
| 135 | 陈建能, 陈倩雯, 刘林敏, 等. 旋转式两工位名优茶采摘收集一体末端执行器设计与试验[J]. 农业机械学报, 2024, 55(10): 136-144. |
| CHEN Jianneng, CHEN Qianwen, LIU Linmin, et al. Design and experiment of rotating two workstations integrated effector for famous tea picking and collection [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(10): 136-144. | |
| 136 | 蔡其锴. 名优茶采摘机器人的视觉识别和采摘技术研究[D]. 成都: 电子科技大学, 2024. |
| CAI Qikai. Research on visual recognition and picking technology of tea picking robot [D]. Chengdu: University of Electronic Science and Technology of China, 2024. | |
| 137 | 白振伟,严富威,袁培海,等.基于嵌入式机器视觉智能果实分拣机器人设计与试验[J]. 智能化农业装备学报(中英文), 2023, 4(3): 61-70. |
| BAI Zhenwei, YAN Fuwei, YUAN Peihai, et al. Design and experiment of fruit sortingrobot based on embedded machine vision [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 61-70. |
| [1] | 韦慧玲, 梁成斌, 王金海, 陈明猷, 罗陆锋. 绳驱柔性机械手研究进展及其在农业机器人中的应用[J]. 智能化农业装备学报(中英文), 2024, 5(4): 95-106. |
| [2] | 闫全涛, 李丽霞, 邱权, 丛岳. 小型农田原状土样采集机器人系统研发与测试[J]. 智能化农业装备学报(中英文), 2024, 5(1): 12-22. |
| [3] | 赵静娟, 杨艳萍, 郑怀国, 董瑜. 全球农业机器人研发趋势预测*[J]. 智能化农业装备学报(中英文), 2021, 2(1): 28-35. |
| [4] | 孙宜田, 陈刚, 李青龙, 孙永佳, 沈景新, 闫宁. 智慧农业的应用及发展趋势与挑战[J]. 智能化农业装备学报(中英文), 2020, 1(1): 56-59. |
| [5] | 毛婷婷, 董淑娴, 薛金林. 农业机器人车辆人机协作控制的动态功能分配研究*[J]. 智能化农业装备学报(中英文), 2020, 1(1): 24-31. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||