ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2024, Vol. 5 ›› Issue (4): 95-106.DOI: 10.12398/j.issn.2096-7217.2024.04.007
WEI Huiling1( ), LIANG Chengbin1, WANG Jinhai2, CHEN Mingyou1, LUO Lufeng1()
), LIANG Chengbin1, WANG Jinhai2, CHEN Mingyou1, LUO Lufeng1()
Received:2024-02-27
Revised:2024-04-22
Online:2024-11-15
Published:2024-11-15
Corresponding author:
LUO Lufeng
CLC Number:
WEI Huiling, LIANG Chengbin, WANG Jinhai, CHEN Mingyou, LUO Lufeng. Research progress of cable-driven flexible manipulator and its application in agricultural robots[J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 95-106.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2024.04.007

Figure 1 Design prototype of cable-driven flexible manipulator

Figure 2 Modelling prototype of cable-driven flexible manipulator

Figure 3 Cable-driven robotic in the field of agile operation
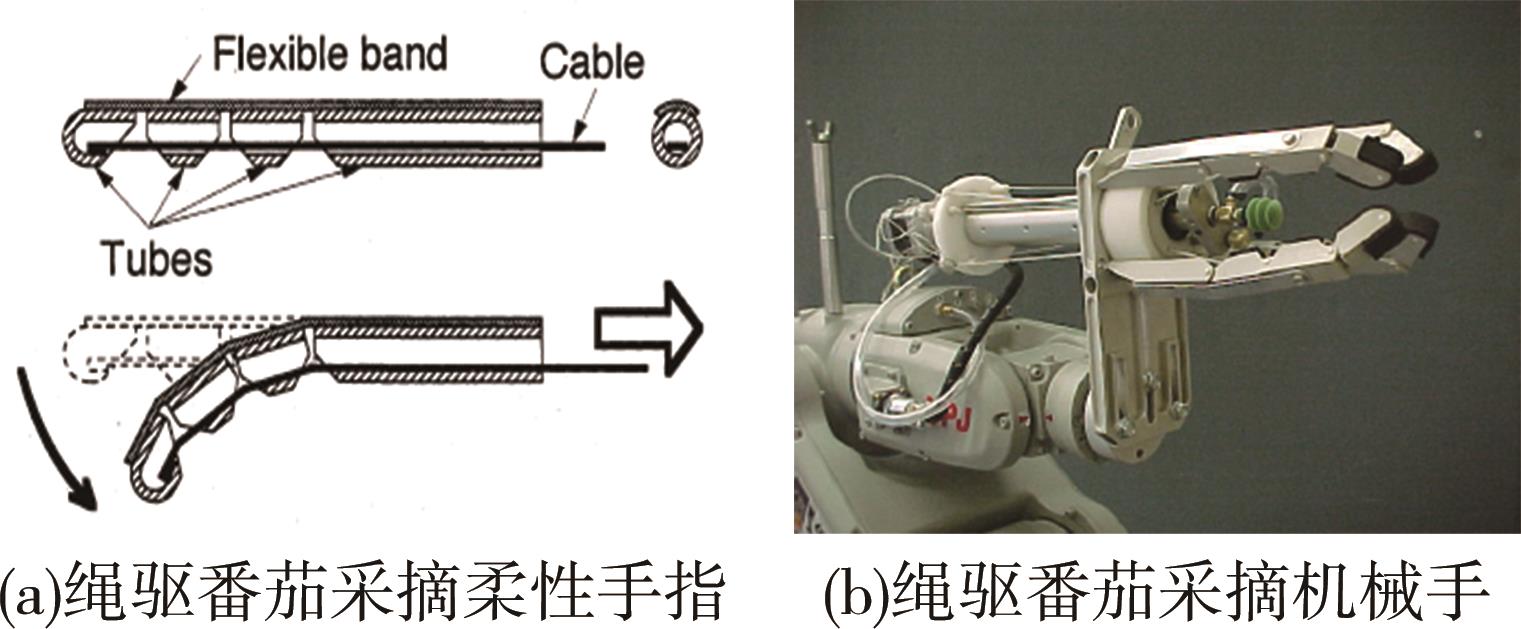
Figure 4 Cable-driven tomato picking robot

Figure 5 Super redundant cable-driven continuous picking robot

Figure 6 Cable-driven apple picking robot
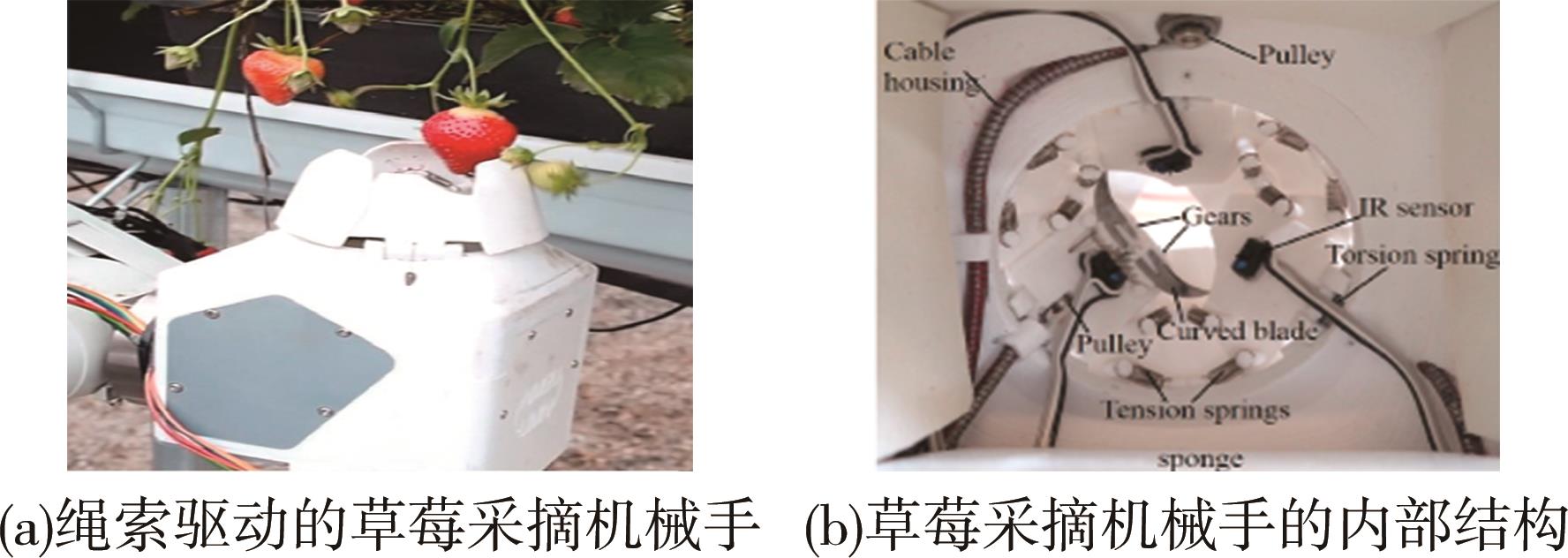
Figure 7 Cable-driven gripper for strawberry picking
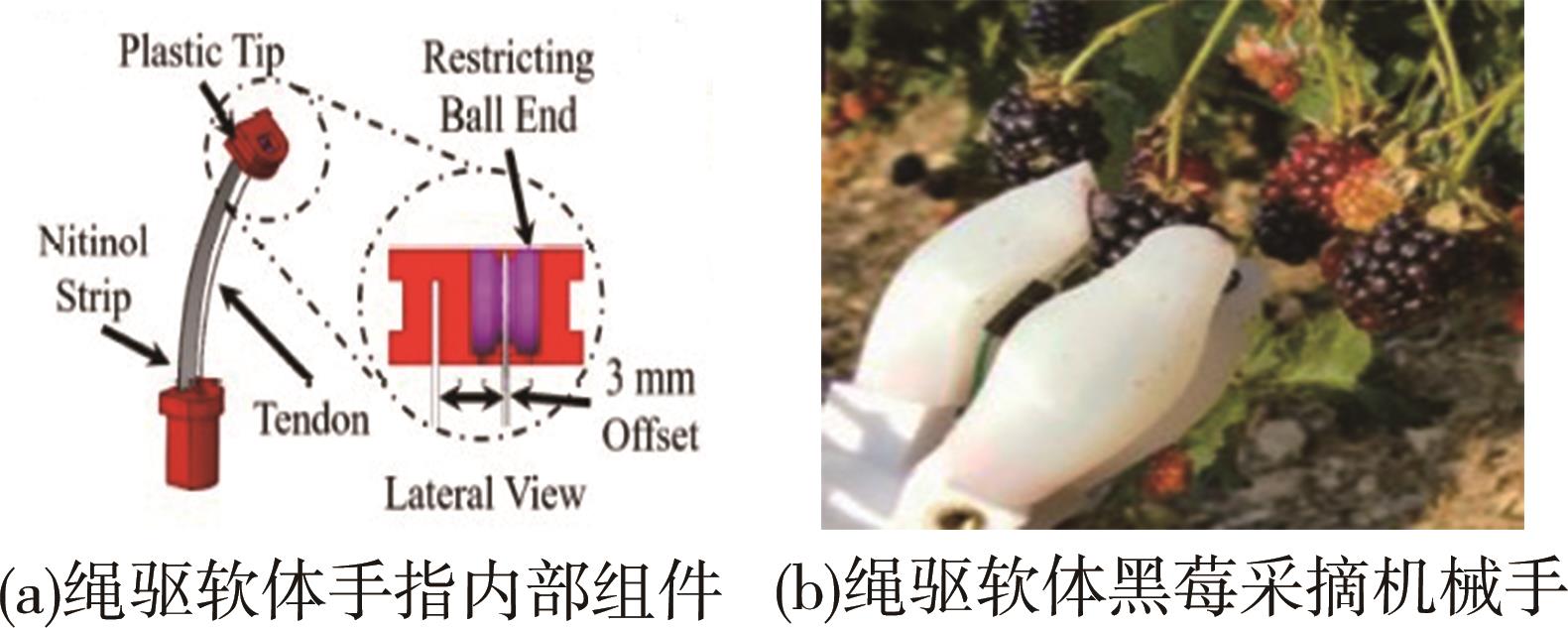
Figure 8 Cable-driven soft gripper for blackberry picking
| 性能参数 | 类型 | ||
|---|---|---|---|
| 刚性机械手 | 气动软体 机械手 | 绳驱柔性机械手 | |
| 结构特点 | 刚度高、笨重 | 刚度低、较笨重 | 可变刚度、轻量化 |
| 自由度 | 少 | 无限多 | 多 |
| 柔顺性 | 低 | 高 | 高 |
| 灵活性 | 低 | 较高 | 高 |
| 安全性 | 低 | 高 | 高 |
| 工作环境 | 结构化 | 结构化和 非结构化 | 结构化和 非结构化 |
| 建模难易 | 容易 | 困难 | 较容易 |
| 控制难易 | 容易 | 不易 | 较容易 |
| 传动效率 | 高 | 低 | 较高 |
| 操作对象 | 固定尺寸 | 可变尺寸 | 可变尺寸 |
| 输出力 | 大 | 小 | 可变 |
Table 1 Comparison of relevant characteristics of different types of picking manipulator
| 性能参数 | 类型 | ||
|---|---|---|---|
| 刚性机械手 | 气动软体 机械手 | 绳驱柔性机械手 | |
| 结构特点 | 刚度高、笨重 | 刚度低、较笨重 | 可变刚度、轻量化 |
| 自由度 | 少 | 无限多 | 多 |
| 柔顺性 | 低 | 高 | 高 |
| 灵活性 | 低 | 较高 | 高 |
| 安全性 | 低 | 高 | 高 |
| 工作环境 | 结构化 | 结构化和 非结构化 | 结构化和 非结构化 |
| 建模难易 | 容易 | 困难 | 较容易 |
| 控制难易 | 容易 | 不易 | 较容易 |
| 传动效率 | 高 | 低 | 较高 |
| 操作对象 | 固定尺寸 | 可变尺寸 | 可变尺寸 |
| 输出力 | 大 | 小 | 可变 |
| 1 | LANGOWSKI J K A, SHARMA P, SHOUSHTARI A L. In the soft grip of nature [J].Science Robotics, 2020, 5(49): 1-3. |
| 2 | KANEKO M, PAETSCH W. Input-dependent stability of joint torque control of tendon-driven robot hands [J]. IEEE Transactions on Industrial Electronics, 1992, 39(2): 96-104. |
| 3 | MANTI M, HASSAN T, PASSETTI G, et al. A bioinspired soft robotic gripper for adaptable and effective grasping [J]. Soft Robotics, 2015, 2(3): 107-116. |
| 4 | TAN N, GU X Y, REN H L. Design, characterization and applications of a novel soft actuator driven by flexible shafts [J]. Mechanism and Machine Theory, 2018, 122: 197-218. |
| 5 | ZHANG P, CHEN W C, TANG B. From two-dimensional to three-dimensional: Diversified bending modality of a cable-driven actuator and its grasping characteristics [J]. Soft Robotics, 2022, 9(6): 1154-1166. |
| 6 | DONG H, ASADI E, QIU C, et al. Grasp analysis and optimal design of robotic fingertip for two tendon-driven fingers [J]. Mechanism and Machine Theory, 2018, 130: 447-462. |
| 7 | CAMARILLO D B, MILNE C F, CARLSON C R, et al. Mechanics modeling of tendon-driven continuum manipulators [J]. IEEE Transactions on Robotics, 2008, 24(6): 1262-1273. |
| 8 | PU S W, CHANG H T, CHANG J Y. Modeling and development of tension force measurement system for cable-driven hand exoskeleton robot [C]//2015 IEEE International Conference on Advanced Intelligent Mechatronics, 2015. |
| 9 | MIN S, YI S. Development of cable-driven anthropomorphic robot hand [J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1176-1183. |
| 10 | BACKUS S B, DOLLAR A M. An adaptive three-fingered prismatic gripper with passive rotational joints [J]. IEEE Robotics and Automation Letters, 2016, 1(2): 668-675. |
| 11 | ABEACH A, NEFTI M S, DAVIS S. Design of a variable stiffness soft dexterous gripper [J]. Soft Robotics, 2017, 4(3): 1-11. |
| 12 | LOVCHIK C S, DIFTLER M A. The robonaut hand: A dexterous robot hand for space [C]// Proceedings 1999 IEEE international conference on robotics and automation (Cat. No. 99 CH36288C). IEEE, 1999, 2: 907-912. |
| 13 | POTRATZ J, YANG J Z, ABDEL-MALEK K, et al. A light weight compliant hand mechanism with high degrees of freedom [J]. Journal of Biomechanical Engineering, 2005, 127: 934-945. |
| 14 | WU L J, ANDRADE M J, SAHARAN L K, et al. Compact and low-cost humanoid hand powered by nylon artificial muscles [J]. Bioinspiration and Biomimetics, 2017, 12(2): 026004. |
| 15 | PALLI G, NATALE C, MAY C, et al. Modeling and control of the twisted string actuation system [J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(2): 664-673. |
| 16 | PALLI G, HOSSEINI M, MELCHIORRI C. Twisted string actuation with sliding surfaces [C]// 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 2016: 260-265. |
| 17 | WISTE T, GOLDFARB M. Design of a simplified compliant anthropomorphic robot hand [C]// 2017 IEEE International Conference on Robotics and Automation, Singapore, 2017(1): 3433-3438. |
| 18 | HAM K, HAN J, PARK Y J. Soft gripper using variable stiffness mechanism and its application [J]. International Journal of Precision Engineering and Manufacturing, 2018, 19(4): 487-494. |
| 19 | LI C, GU X, REN H. A cable-driven flexible robotic grasper with lego-like modular and reconfigurable joints [J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2757-2767. |
| 20 | DONG H, ASADI E, QIU C, et al. Geometric design optimization of an under-actuated tendon-driven robotic gripper [J]. Robotics and Computer-Integrated Manufacturing, 2018, 50: 80-89. |
| 21 | TANG X T, LI K, LIU Y X, et al. A general soft robot module driven by twisted and coiled actuators [J]. Smart Materials and Structures, 2019, 28(3): 035019. |
| 22 | WANG R X, ZHANG X M, ZHU B L. Topology optimization of a cable-driven soft robotic gripper [J]. Structural and Multidisciplinary Optimization, 2020, 62(5): 2749-2763. |
| 23 | J-Y NAGASE, WAKIMOTO S, SATOH T, et al. Design of a variable-stiffness robotic hand using pneumatic soft rubber actuators [J]. Smart Materials and Structures, 2011, 20: 105015. |
| 24 | GIORELLI M, RENDA F, FERRI G, et al. A feed-forward neural network learning the inverse kinetics of a soft cable-driven manipulator moving in three-dimensional space [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 2013: 5033-5039. |
| 25 | CHEN F F, XU W J, ZHANG H Y, et al. Topology optimized design, fabrication and characterization of a soft cable-driven gripper [J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2463-2470. |
| 26 | WU Q, YI Z L, WANG H Q, et al. Design and experiment of a soft gripper based on cable-driven continuum structures [C]// Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics, December 27-31, 2021, Sanya, China. |
| 27 | CHEN T R, ZHAO X W, MA G C, et al. Design of 3D-printed cable driven humanoid hand based on bidirectional elastomeric passive transmission [J]. Chinese Journal of Mechanical Engineering, 2021, 34(1): 1-11. |
| 28 | 王国庆, 张启先, 李大寨, 等. 基于抓持稳定度的多指灵巧手抓持控制[J]. 航空学报, 1997, 18(3): 294-298. |
| WANG Guoqing, ZHANG Qixian, LI Dazhai, et al. Grasping control of the dexterous hand based on the degree of stability of grasping [J]. Acta Aeronautica et Astronautica Sinica, 1997, 18(3): 294-298. | |
| 29 | 何平, 金明河, 刘宏, 等. 机器人多指灵巧手基关节力矩/位置控制系统的研究[J]. 机器人, 2002, 24(4): 314-318. |
| HE Ping, JIN Minghe, LIU Hong, et al. Study of position and torque feedback control system of multi-fingered dexterous robot hand [J]. Robot, 2002, 24(4): 314-318. | |
| 30 | FIROUZEH A, PAIK J. Grasp mode and compliance control of an under-actuated origami gripper using adjustable stiffness joints [J]. IEEE-ASME Transactions on Mechatronics, 2017, 22(5): 2165-2173. |
| 31 | GAO Y, HUANG X G, MANN I S, et al. A novel variable stiffness compliant robotic gripper based on Layer jamming [J]. Journal of Mechanisms and Robotics, 2020, 12(5): 051013. |
| 32 | QIAO S, ZHANG L, LI B, et al. Coupled bending inwards motion and control strategy analysis of a cable-driven underactuated finger [J]. IEEE Access, 2021, 9: 133902-133913. |
| 33 | JEONG U, IN H K, CHO K J. Implementation of various control algorithms for hand rehabilitation exercise using wearable robotic hand [J]. Intelligent Service Robotics, 2013, 6: 181-189. |
| 34 | IN H, LEE H, JEONG U, et al. Feasibility study of a slack enabling actuator for actuating tendon-driven soft wearable robot without pretension [C]// IEEE International Conference on Robotics and Automation, Seattle, Washington, 2015: 1229-1234. |
| 35 | KAZEMINASAB S, HADI A, ALIPOUR K, et al. Force and motion control of a tendon-driven hand exoskeleton actuated by shape memory alloys [J]. Industrial Robot-the International Journal of Robotics Research and Application, 2018, 45(5): 623-633. |
| 36 | TOKUJI O. Computer control of multijointed finger system for precise object-handling [J]. IEEE Transactions on Systems, Man, and Cybernetics, 1982, 12(3): 289-299. |
| 37 | JACOBSEN S C, WOOD J E, KNUTTI D F, et al. The UTAH/MIT dextrous hand: Work in progress [J]. The International Journal of Robotics Research, 1984, 3(4): 21-50. |
| 38 | MATTHEW T M, J.KENNETH S, JOEY K P. Robot hands and the mechanics of manipulation [M]. MIT Press, Cambridge, USA, 1985: 3-93. |
| 39 | TUFFIELD P, ELIAS H. The shadow robot mimics human actions [J]. Industrial Robot: An International Journal, 2003, 30(1): 56-60. |
| 40 | DESHPANDE A D, XU Z, WEGHE M, et al. Mechanisms of the anatomically correct testbed hand [J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 238-250. |
| 41 | MISHRA A K, DOTTORE E D, SADEGHI A, et al. SIMBA: Tendon-driven modular continuum arm with soft reconfigurable gripper [J]. Frontiers in Robotics and AI, 2017, 4(4): 1-10. |
| 42 | 中华人民共和国国家统计局. 2022中国统计年鉴[M]. 北京: 中国统计出版社, 2022. |
| 43 | 刘继展, 李智国, 李萍萍. 番茄采摘机器人快速无损作业研究[M]. 北京: 科学出版社, 2018. |
| 44 | BAC C W, VAN HENTEN E J, HEMMING J, et al. Harvesting robots for high-value crops: State-of-the-art review and challenges ahead [J]. Journal of Field Robotics, 2014, 31(6): 888-911. |
| 45 | MALDERA F, VIVALDI G A, IGLESIAS-CASTELLARNAU I, et al. Two almond cultivars trained in a super-high density orchard show different growth, yield efficiencies and damages by mechanical harvesting [J]. Agronomy, 2021, 11: 1406. |
| 46 | 孙凝晖, 张玉成, 石晶林. 构建我国第三代农机的创新体系[J]. 中国科学院院刊, 2020, 35(2): 154-165. |
| SUN Ninghui, ZHANG Yucheng, SHI Jinglin. Build innovation system of third generation of agricultural machinery in China [J]. Bulletin of Chinese Academy of Sciences, 2020, 35(2): 154-165. | |
| 47 | 赵春江. 智慧农业发展现状及战略目标研究[J]. 智慧农业, 2019, 1(1): 1-7. |
| ZHAO Chunjiang. State-of-the-art and recommended developmental strategic objectivs of smart agriculture [J]. Smart Agriculture, 2019, 1(1): 1-7. | |
| 48 | VASCONEZ J P, KANTOR G A, AUAT CHEEIN F A. Humane-robot interaction in agriculture: A survey and current challenges [J]. Biosystems Engineering, 2019, 179: 35-48. |
| 49 | RICHARD H. How robots are grasping the art of gripping [J]. Nature, 2018, 557(7704): 23-25. |
| 50 | LUO L, TANG Y, ZOU X, et al. Vision-based extraction of spatial information in grape cluster for harvesting robots [J]. Biosystems Engineering, 2016, 151(11): 90-104. |
| 51 | 吴剑桥, 范圣哲, 贡亮, 等. 果蔬采摘机器手系统设计与控制技术研究现状和发展趋势[J]. 智慧农业(中英文), 2020, 2(4): 17-40. |
| WU Jianqiao, FAN Shengzhe, GONG Liang, et al. Research status and development direction of design and control technology of fruit and vegetable picking robot system [J]. Smart Agriculture, 2020, 2(4): 17-40. | |
| 52 | 蔡世波, 陶志成, 万伟伟, 等. 机器人多指灵巧手的研究现状、趋势与挑战[J]. 机械工程学报, 2021, 57(15): 1-14. |
| CAI Shibo, TAO Zhicheng, WAN Weiwei, et al. Multi-fingered dexterous hands: From simplicity to complexity and simplifying complex applications [J]. Journal of Mechanical Engineering, 2021, 57(15): 1-14. | |
| 53 | XIONG Y, PENG C, GRIMSTAD L, et al. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper [J]. Computers and Electronics in Agriculture, 2019, 157: 392-402. |
| 54 | CERES R, PONS J L, JIMÉNEZ A R, et al. Design and implementation of an aided fruit-harvesting robot (Agribot) [J]. Industrial robot, 1998, 5(5): 337-346. |
| 55 | 刘成良, 贡亮, 苑进, 等. 农业机器人关键技术研究现状与发展趋势[J]. 农业机械学报, 2022, 53(7): 1-22, 55. |
| LIU Chengliang, GONG Liang, YUAN Jin, et al. Current status and development trends of agricultural robots [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(7): 1-22, 55. | |
| 56 | MONTA M, KONDO N, TING K C. Harvesting end-effector for inverted single truss tomato production systems [J]. Journal of the Japanese Society of Agricultural Machinery, 1998, 60(6): 97-104. |
| 57 | MONTA M, KONDO N, TING K C. End-effectors for tomato harvesting robot [J]. Artificial Intelligence Review, 1998, 13(1-3): 11-25. |
| 58 | LING P P, EHSANI R, TING K C, et al. Sensing and end-effector for a robotic tomato harvester [C]// ASAE Annual International Meeting, 2004: 1-12. |
| 59 | YESHMUKHAMETOV A, KOGANEZAWA K, YAMAMOTO Y. Design and kinematics of cable-driven continuum robot arm with universal joint backbone [C]// IEEE International Conference on Robotics and Biomimetics. IEEE, 2018, December 12-15, 2018, Kuala Lumpur, Malaysia, 2444-2449. |
| 60 | YESHMUKHAMETOV A, KOGANEZAWA K, BURIBAYEV Z, et al. Development of continuum robot arm and gripper for harvesting cherry tomatoes [J]. Applied Science, 2022, 12: 6922. |
| 61 | SILWAL A, DAVIDSON J R, KARKEE M, et al. Design, integration, and field evaluation of a robotic apple harvester [J]. Journal of Field Robotics, 2017, 34(6): 1140-1159. |
| 62 | DAVIDSON J R, MO C. Conceptual design of an end-effector for an apple harvesting robot [C]// Conference on Automation Technology for Off-Road Equipment (ATOE), Beijing, China. 2014, 18: 2021. |
| 63 | DAVIDSON J R, MO C. Mechanical design and initial performance testing of an apple-picking end-effector [C]//ASME International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers, 2015, 57397: V04 AT 04A011. |
| 64 | XIONG Y, FROM P J, ISLER V O. Design and evaluation of a novel cable-driven gripper with perception capabilities for strawberry picking robots [C]// 2018 IEEE International Conference on Robotics and Automation (ICRA), May 21-25, 2018, Brisbane, Australia,7384-7391. |
| 65 | XIONG Y, GE Y Y, GRIMSTAD L, et al. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation [J]. Journal of Field Robotics, 2020, 37(2): 202-224. |
| 66 | GUNDERMAN A L, COLLINS J, MYER A, et al. Tendon-driven soft robotic gripper for blackberry harvesting [J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2652-2659. |
| 67 | 高国华, 董增雅, 孙晓娜, 等. 基于3D打印的柔性机械手研制及试验研究[J]. 智慧农业, 2019, 1(1): 85-95. |
| GAO Guohua, DONG Zengya, SUN Xiaona, et al. Development and test of a flexible manipulator based on 3D printing [J]. Smart Agriculture, 2019, 1(1): 85-95. |
| [1] | LI Jianping, LI Shaobo, YANG Xin, ZHANG Kuo, XIE Jinyan, LIU Shuteng, JIANG Zunhao, ZHANG Zhu, WANG Peng. Research progress on intelligent mechanization technology and equipment for apple orchard production management [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 66-83. |
| [2] | WANG Yuanhong, YANG Zhiming, WANG Qi, LU Jinzhu, GAO Junfeng. Design and experiment of tea bud recognition method and light source of recognition system based on YOLOv5-SPD [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(3): 33-43. |
| [3] | WEI Tangwei, ZHANG Jincheng, WANG Jing, ZHOU Qingyan. Study of tea buds recognition and detection based on improved YOLOv7 model [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(2): 42-50. |
| [4] | Jieli Duan, , Zhaorui Wang, Lei Ye, Zhou Yang, , . Research progress and development trend of motion planning of fruit picking robot arm [J]. Journal of Intelligent Agricultural Mechanization, 2021, 2(2): 7-17. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||