农业农村部主管 农业农村部南京农业机械化研究所主办
ISSN 2096-7217 CN 32-1887/S2
智能化农业装备学报(中英文) ›› 2023, Vol. 4 ›› Issue (4): 20-25.DOI: 10.12398/j.issn.2096-7217.2023.04.003
ZHU Zhengbo( ), CAO Xin, ZHANG Ruihong()
), CAO Xin, ZHANG Ruihong()
摘要:
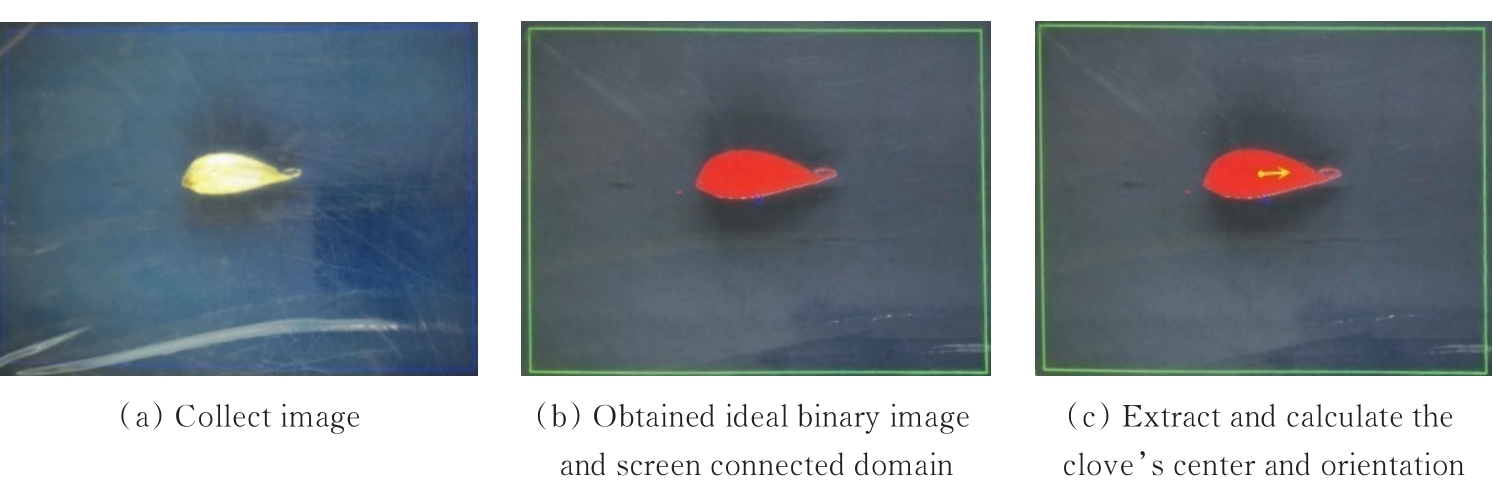
蒜瓣种芽朝上播种的大蒜具有出苗早,蒜苗强壮的特点,是符合中国农艺要求的播种方法。为了提高大蒜机械化播种水平,针对目前大蒜机械化播种种芽朝上率低的问题,研究设计了一种基于并联机器人的蒜瓣种芽朝向调整系统,该系统主要包括四个模块:图像采集、图像预处理、种芽特征提取和指令驱动。首先,蒜瓣运至指定位置后,并联机器人发出的光触发信号,视觉系统接收该信号并立即采集图像。其次,通过对图像进行中值滤波、二值化和形态学处理,填充孔洞,滤除背景颗粒,得到理想的二值图像,并根据蒜瓣的大小范围对二值图像的连通域面积进行筛选,得到大小合适的蒜瓣二值图像。第三,提取并计算图像的中心轮廓和轮廓的曲率,将曲率最大的部分视为蒜瓣的种芽,从而确定蒜瓣的中心位置及朝向,该朝向信息也会被量化为角度值。最后,并联机器人根据蒜瓣的位置信息、速度矢量信息和朝向信息控制机械臂进行蒜瓣抓取和定向摆放的操作,实现蒜瓣种芽朝向的调整。最后本文对调整系统的关键参数进行了试验测试,建立了调整成功率的多元回归模型,结果表明:(1)蒜瓣重量、输送速度和抓取时间对调整成功率有重要影响。(2)影响因素的主次顺序依次为抓取时间、蒜瓣重量、输送速度。(3)当蒜瓣质量为4.54 g,输送速度为0.1 m/s,并且抓取时间为2.445 s时,模型预测的调整成功率最高,达到97.41%。本研究为蒜瓣种芽调整系统的应用提供了技术指导,有助于解决利用嵌入式工控机调整蒜瓣朝向的问题,有利于促进国内大蒜机械化播种。
中图分类号: