农业农村部主管 农业农村部南京农业机械化研究所主办
ISSN 2096-7217 CN 32-1887/S2
智能化农业装备学报(中英文) ›› 2024, Vol. 5 ›› Issue (4): 84-94.DOI: 10.12398/j.issn.2096-7217.2024.04.006
赵立军1( ), 贾云帆1, 殷文科1, 黄华1, 李想2, 李强1()
), 贾云帆1, 殷文科1, 黄华1, 李想2, 李强1()
收稿日期:2024-08-05
修回日期:2024-09-23
出版日期:2024-11-15
发布日期:2024-11-15
通讯作者:
李强,男,1989年生,黑龙江庆安人,博士,副教授;研究方向为山地智能农业装备及机器人。E-mail: 20200004@cqwu.edu.cn
作者简介:赵立军,男,1980年生,黑龙江克山人,博士,教授;研究方向为山地智能农业装备及机器人。E-mail: 20190005@cqwu.edu.cn
基金资助:
ZHAO Lijun1(), JIA Yunfan1, YIN Wenke1, HUANG Hua1, LI Xiang2, LI Qiang1()
Received:2024-08-05
Revised:2024-09-23
Online:2024-11-15
Published:2024-11-15
Contact:
LI Qiang
摘要:
针对丘陵山区果园除草作业困难、除草效率低、智能化水平不高等问题,设计了一种小型山地果园除草机器人。为提高履带式除草机器人作业路径的跟踪精度,开展了履带式除草机器人路径跟踪控制算法研究。采用“倒三角形旋接结构”设计了一种仿形浮动底盘,搭载“Y型”甩刀组件进行粉碎除草作业,由增程式油电混合动力系统提供动力支持,针对斜坡转向滑移大等问题提出了基于模型预测控制(MPC)的斜坡转向控制策略,采用往返式路径规划方法对果园进行全覆盖路径规划,结合BDS定位导航技术及全覆盖路径规划方式,确保履带式除草机器人在作业过程中具备高跟踪精度。构建履带除草机器人运动学模型,在MATLAB软件中,对履带除草机器人在斜坡上的转向动力学及其控制策略进行了仿真分析。仿真试验结果表明,设计的坡面转向模型在15°条件下路径跟踪平均误差仅为0.039 m,展现了良好的精确度。田间试验表明,提出的MPC控制器能够有效改善坡面转向工况下路径跟踪效果,在坡度角为15°时,上下坡工况下平均误差相较于PID控制器分别减小了51.76%,63.77%。融合北斗导航功能的除草机器人,有效除草率高于97%,可在25°坡面上正常行走。该研究成果为丘陵山地除草机器人的研制提供了参考。
中图分类号:
赵立军, 贾云帆, 殷文科, 黄华, 李想, 李强. 基于模型预测控制的履带式除草机器人设计与试验[J]. 智能化农业装备学报(中英文), 2024, 5(4): 84-94.
ZHAO Lijun, JIA Yunfan, YIN Wenke, HUANG Hua, LI Xiang, LI Qiang. Design and experiment of a tracked weeding robot based on model predictive control[J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 84-94.
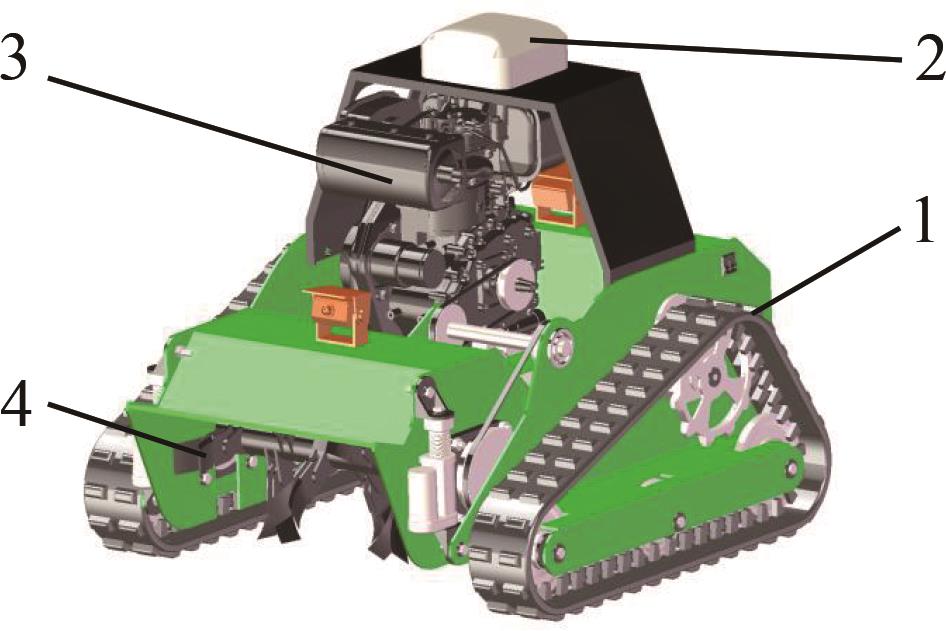
图1 整体三维模型1.仿形履带底盘2.导航系统 3.动力系统 4.粉碎除草单元
Figure 1 Overall 3D model
| 项目名称 | 参数 |
|---|---|
| 底盘重量/kg | 200 |
| 底盘总体尺寸/(mm×mm×mm) | 1 100×950×400 |
| 履带接地长度/mm | 800 |
| 履带宽度/mm | 145 |
| 轨距/mm | 600 |
| 履带节距/mm | 60 |
| 接地比压/kPa | 8.4 |
| 最大爬坡度/(°) | 30 |
| 跨沟宽度/mm | 400 |
| 越障高度/mm | 200 |
表1 履带底盘主要参数
Table 1 Main parameters of crawler chassis
| 项目名称 | 参数 |
|---|---|
| 底盘重量/kg | 200 |
| 底盘总体尺寸/(mm×mm×mm) | 1 100×950×400 |
| 履带接地长度/mm | 800 |
| 履带宽度/mm | 145 |
| 轨距/mm | 600 |
| 履带节距/mm | 60 |
| 接地比压/kPa | 8.4 |
| 最大爬坡度/(°) | 30 |
| 跨沟宽度/mm | 400 |
| 越障高度/mm | 200 |

图2 除草机器人导航系统组成2.北斗定位模块 3.车载控制终端
Figure 2 Composition of the weeding robot navigation system1.IMU
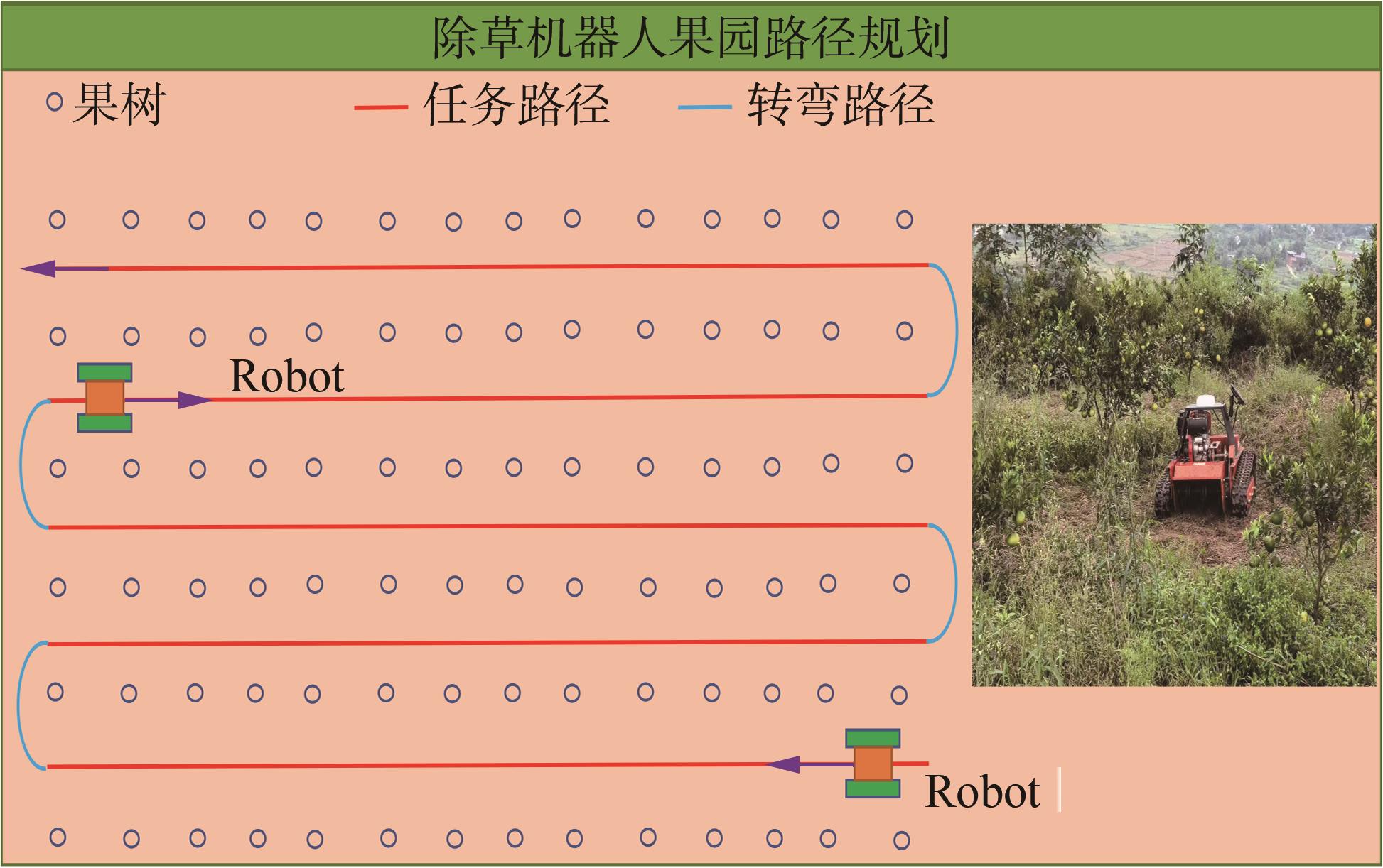
图3 果园往返式路径规划图
Figure 3 Orchard round-trip path planning diagram

图4 履带除草机器人模型
Figure 4 Tracked robot model
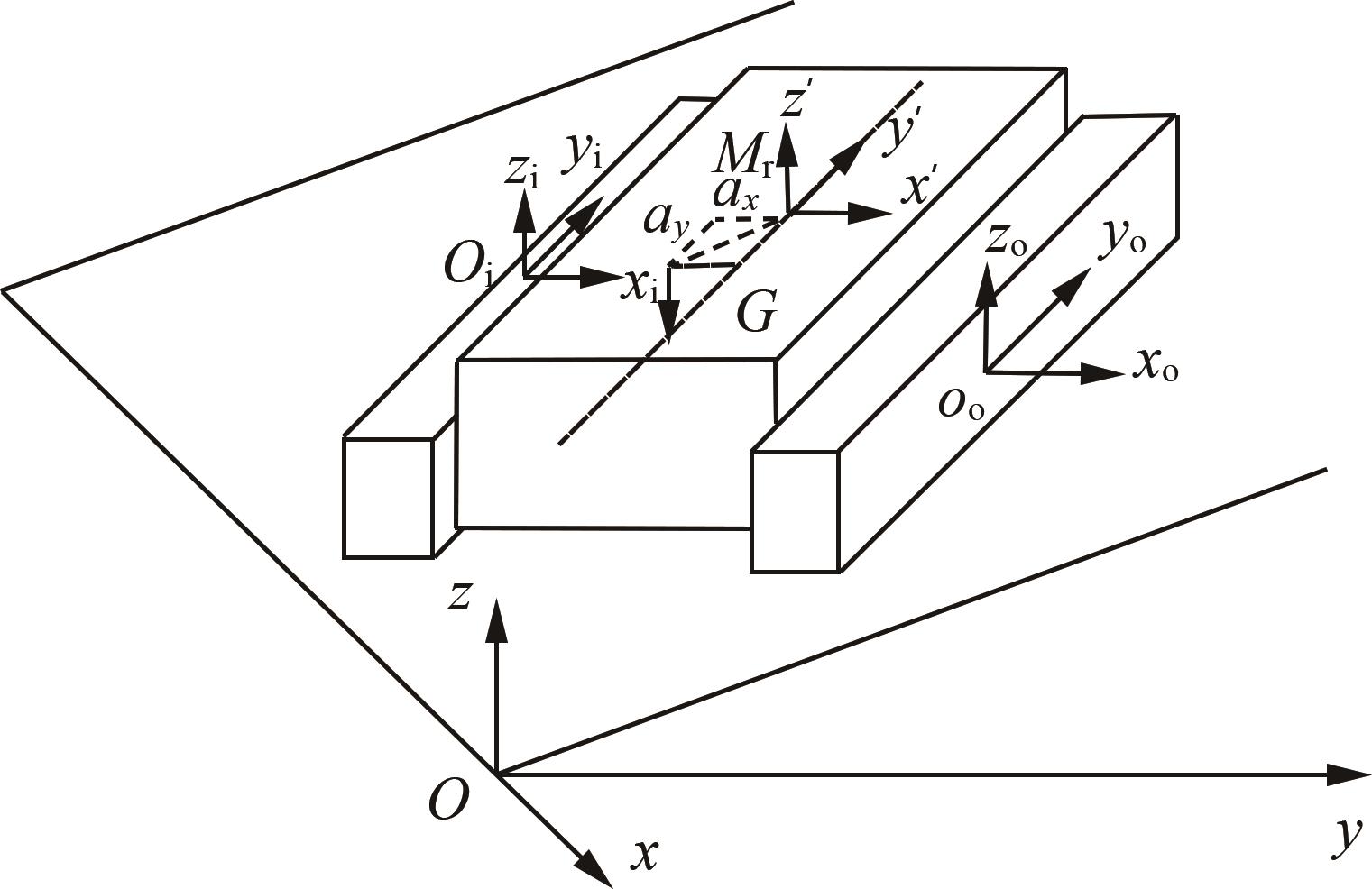
图5 除草机器人斜坡分析
Figure 5 Vehicle slope analysis
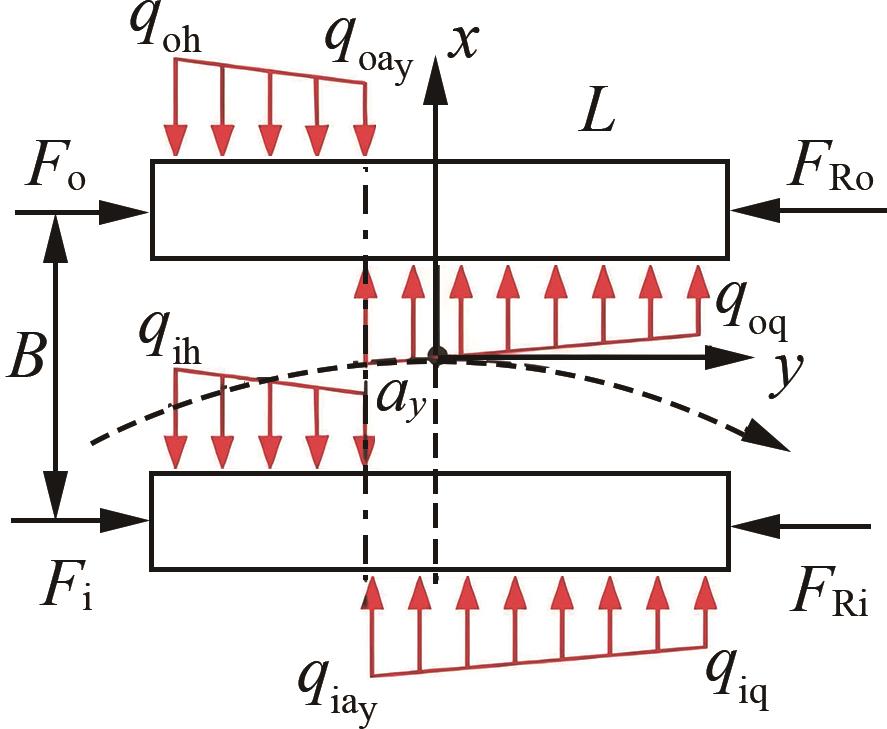
图6 履带所受平行于路面的横向力分布
Figure 6 Distribution of transverse forces on the track parallel to the road surface
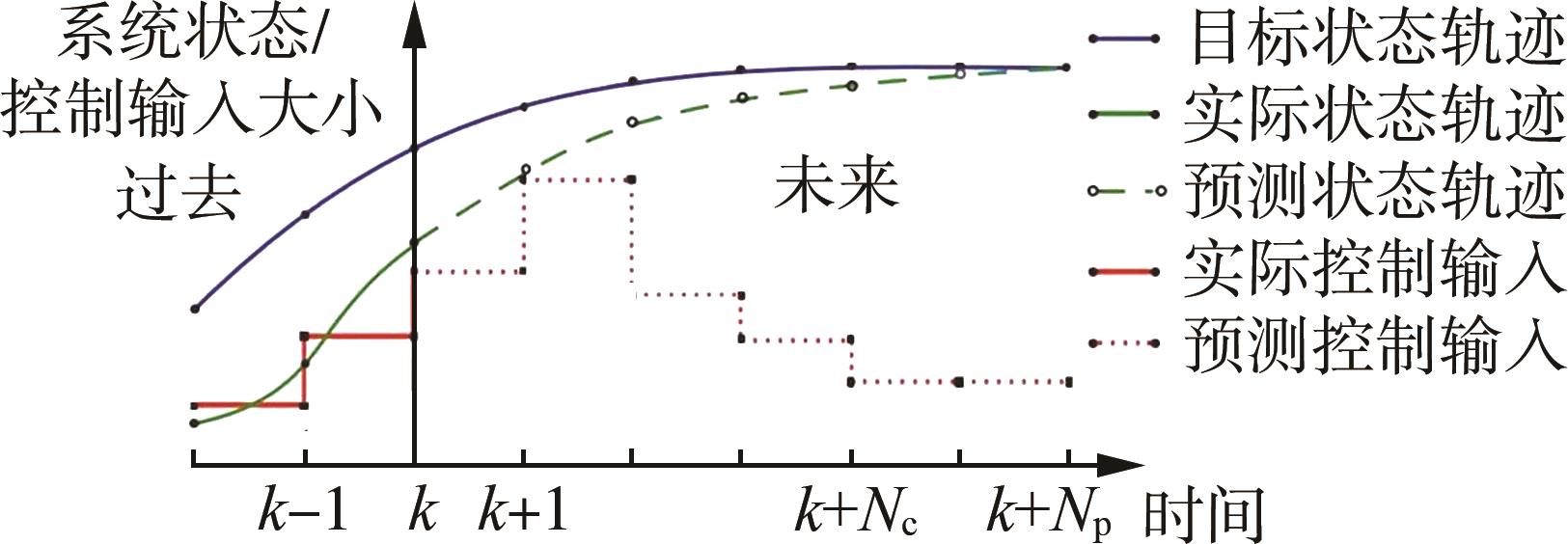
图7 模型预测控制原理图
Figure 7 Schematic of model predictive control
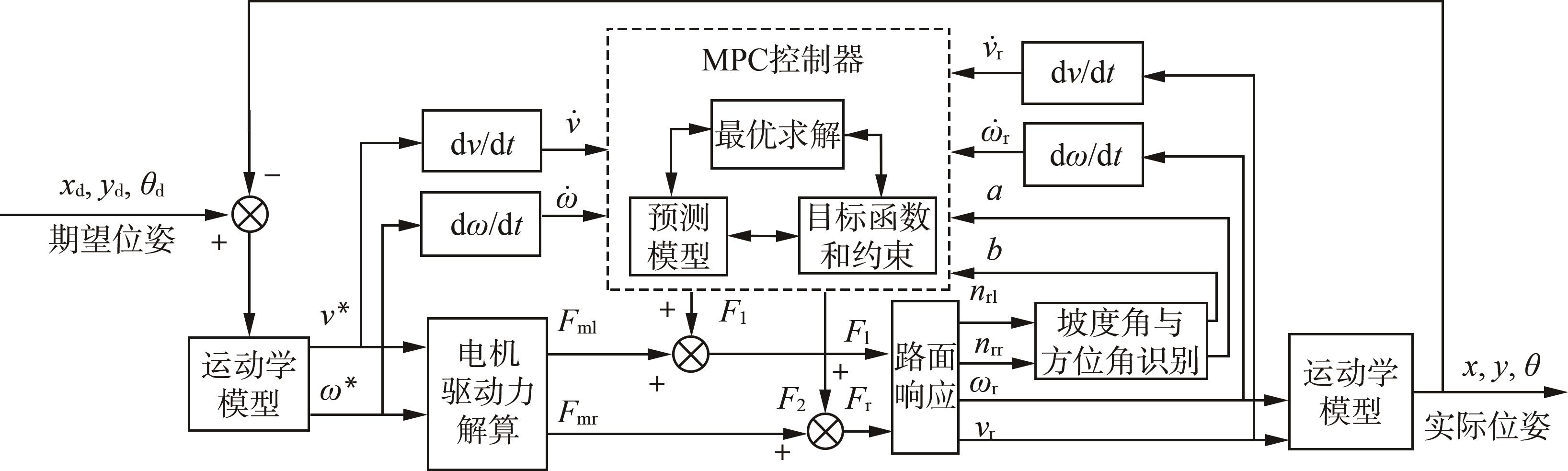
图8 坡面转向控制策略
Figure 8 Slope steering control strategy
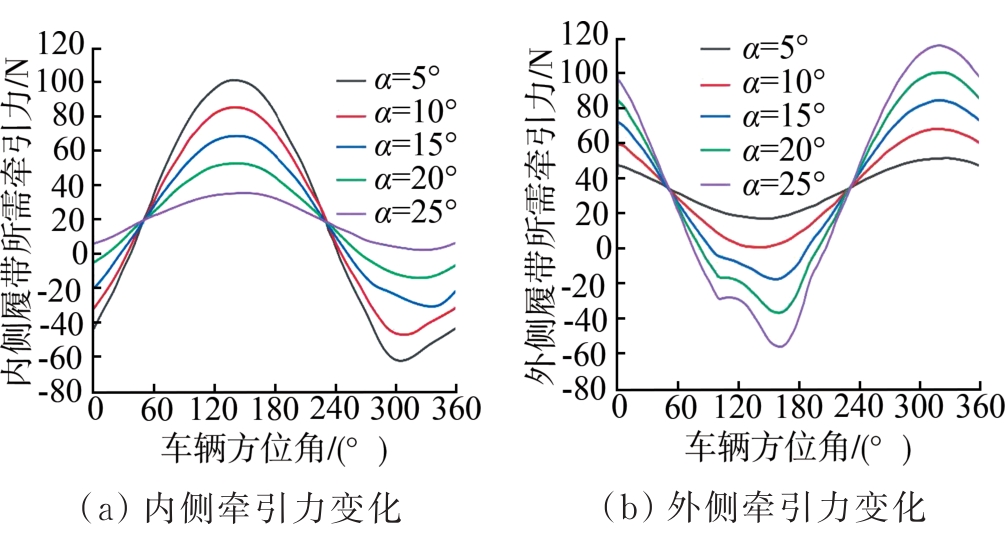
图9 不同坡面倾角条件下牵引力变化趋势(R=3 m)
Figure 9 Traction trend at different slopes (R=3 m)
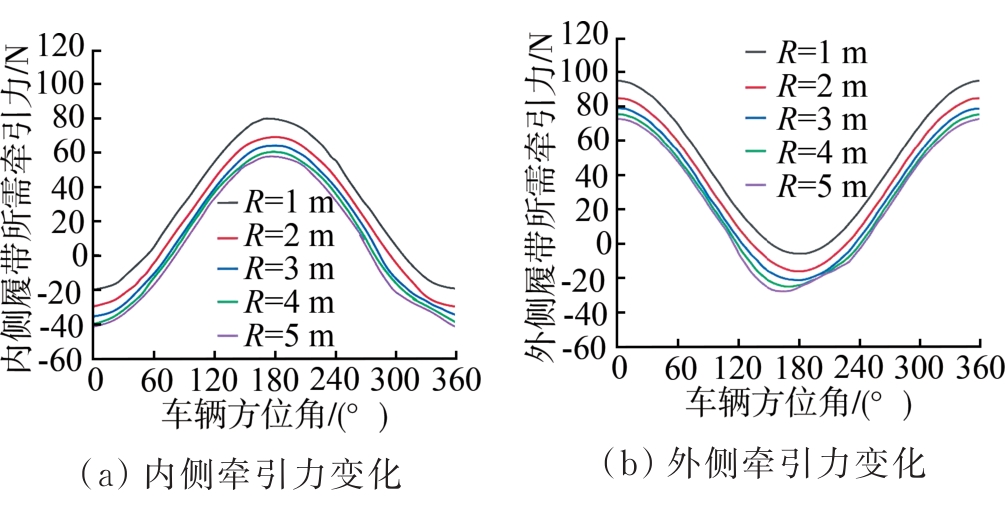
图10 不同转向半径条件下牵引力变化趋势(a=15°)
Figure 10 Traction trend changes under different steering radii (a=15°)
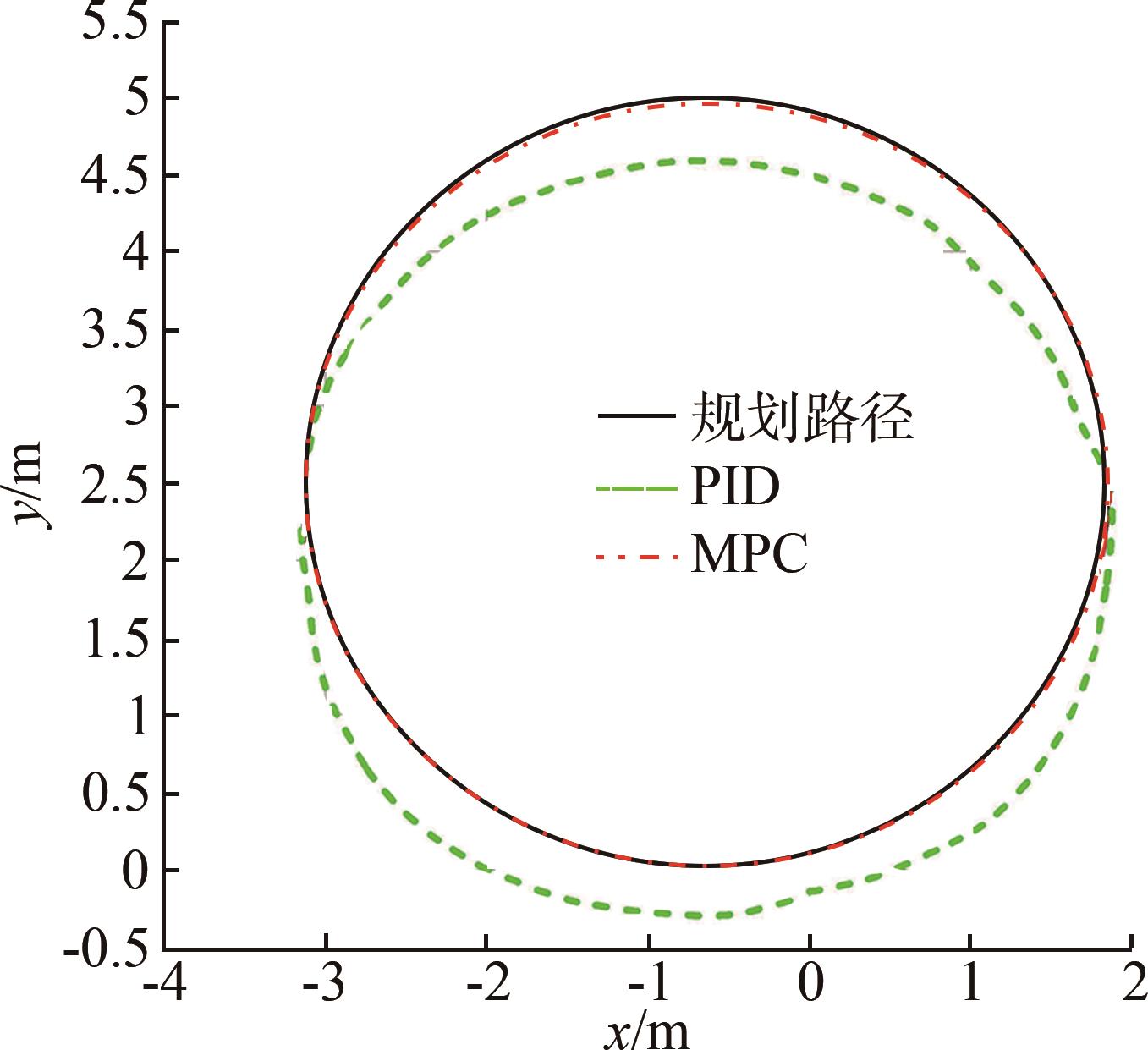
图11 转弯行驶二维路径跟踪
Figure 11 Turn-by-turn driving 2D path tracking
| 控制方法 | 最大误差/m | 平均误差/m | ||
|---|---|---|---|---|
| x方向 | y方向 | x方向 | y方向 | |
| PID | 0.231 5 | 0.756 3 | 0.063 7 | 0.425 8 |
| MPC | 0.192 3 | 0.401 5 | 0.014 5 | 0.062 6 |
表2 坡面转向跟踪性能仿真对比
Table 2 Positioning accuracy statistics
| 控制方法 | 最大误差/m | 平均误差/m | ||
|---|---|---|---|---|
| x方向 | y方向 | x方向 | y方向 | |
| PID | 0.231 5 | 0.756 3 | 0.063 7 | 0.425 8 |
| MPC | 0.192 3 | 0.401 5 | 0.014 5 | 0.062 6 |

图12 试验场景
Figure 12 Scenario for experiment

图13 上下坡轨迹跟踪误差
Figure 13 Uphill and downhill trajectory tracking error
| 上坡 | 坡度角5° | 坡度角15° | ||
|---|---|---|---|---|
| 最大误差/cm | 平均误差/cm | 最大误差/cm | 平均误差/cm | |
| PID | 6.92 | 2.32 | 19.86 | 12.21 |
| MPC | 1.31 | 3.21 | 8.52 | 5.89 |
表3 上坡转向路径跟踪性能对比
Table 3 Comparison of uphill steering path tracking performance
| 上坡 | 坡度角5° | 坡度角15° | ||
|---|---|---|---|---|
| 最大误差/cm | 平均误差/cm | 最大误差/cm | 平均误差/cm | |
| PID | 6.92 | 2.32 | 19.86 | 12.21 |
| MPC | 1.31 | 3.21 | 8.52 | 5.89 |
| 下坡 | 坡度角5° | 坡度角15° | ||
|---|---|---|---|---|
| 最大误差/cm | 平均误差/cm | 最大误差/cm | 平均误差/cm | |
| PID | 6.73 | 3.45 | 18.21 | 11.73 |
| MPC | 2.31 | 1.15 | 5.72 | 4.25 |
表4 下坡转向路径跟踪性能对比
Table 4 Comparison of downhill steering path tracking performance
| 下坡 | 坡度角5° | 坡度角15° | ||
|---|---|---|---|---|
| 最大误差/cm | 平均误差/cm | 最大误差/cm | 平均误差/cm | |
| PID | 6.73 | 3.45 | 18.21 | 11.73 |
| MPC | 2.31 | 1.15 | 5.72 | 4.25 |
| 杂草面积/m2 | 漏除面积/m2 | 除草率/% | ||
|---|---|---|---|---|
| 区域1 | 区域2 | 合计 | ||
| 30.00 | 0.32 | 0.38 | 0.70 | 97.77 |
| 20.00 | 0.16 | 0.22 | 0.38 | 98.10 |
| 30.00 | 0.28 | 0.35 | 0.63 | 97.90 |
表5 除草率测定结果
Table 5 Measurement result of weeding rate
| 杂草面积/m2 | 漏除面积/m2 | 除草率/% | ||
|---|---|---|---|---|
| 区域1 | 区域2 | 合计 | ||
| 30.00 | 0.32 | 0.38 | 0.70 | 97.77 |
| 20.00 | 0.16 | 0.22 | 0.38 | 98.10 |
| 30.00 | 0.28 | 0.35 | 0.63 | 97.90 |

图14 除草前后效果
Figure 14 Effect of weeding before and after
| 1 | 任嘉欣. 覆盖作物多样性的地上部生产力及其对柑橘园土壤特性的影响[D]. 重庆: 西南大学, 2023. |
| REN Jiaxin. Aboveground productivity of cover crop diversity and its effects on soil properties in citrus orchards [D]. Chongqing: Southwest University, 2023. | |
| 2 | ZHANG Z, LI R H, ZHAO C, et al. Reduction in weed infestation through integrated depletion of the weed seed bank in a rice-wheat cropping system [J]. Agronomy for Sustainable Development, 2021, 41(1): 10. |
| 3 | 温翔宇. 丘陵山区果园机械化装备发展现状分析与展望[J]. 广东科技, 2021, 30(2): 34-38. |
| 4 | 贠鑫, 吕猛, 王文彬, 等. 果园除草机研究现状与发展趋势[J]. 农业工程, 2020, 10(1): 18-21. |
| YUN Xin, Meng LÜ, WANG Wenbin, et al. Research status and development trend of orchard weeder [J]. Agricultural Engineering, 2020, 10(1): 18-21. | |
| 5 | 赵静娟, 杨艳萍, 郑怀国, 等. 全球农业机器人研发趋势预测[J]. 智能化农业装备学报(中英文), 2021, 2(1): 28-35. |
| ZHAO Jingjuan, YANG Yanping, ZHENG Huaiguo, et al. Global agricultural robotics research and development: Trend forecasts [J]. Journal of Intelligent Agricultural Mechanization(in Chinese and English), 2021, 2(1): 28-35. | |
| 6 | 张漫, 季宇寒, 李世超, 等. 农业机械导航技术研究进展[J]. 农业机械学报, 2020, 51(4): 1-18. |
| ZHANG Man, JI Yuhan, LI Shichao, et al. Robot research progress of agricultural machinery navigation technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(4): 1-18. | |
| 7 | 赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15. |
| ZHAO Chunjiang, FAN Beibei, LI Jin, et al. Agricultural robots: Technology progress, challenges and trends [J]. Smart Agriculture, 2023, 5(4): 1-15. | |
| 8 | 高勇, 陈中武, 李沐桐, 等. 果园除草机器人研究现状与展望[J]. 现代农业装备, 2023, 44(5): 2-8, 29. |
| GAO Yong, CHEN Zhongwu, LI Mutong, et al. Research status and prospects of orchard weeding robots [J]. Modern Agricultural Equipment, 2023, 44(5): 2-8, 29. | |
| 9 | 闫全涛, 李丽霞, 邱权, 等. 小型农田原状土样采集机器人系统研发与测试[J]. 智能化农业装备学报(中英文), 2024, 5(1): 12-22. |
| YAN Quantao, LI Lixia, QIU Quan, et al. Development and test of a small robotic system for in-field undisturbed soil sampling [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(1): 12-22. | |
| 10 | 王焯轩, 王立辉, 许宁徽, 等. 智能收获机器人侧滑及滞后性控制策略研究[J]. 智能化农业装备学报(中英文), 2022, 3(2): 37-44. |
| WANG Zhuoxuan, WANG Lihui, XU Ninghui, et al. Research on the control strategy of sideslip and hysteresis of intelligent harvesting robot [J]. Journal of Intelligent Agricultural Mechanization, 2022, 3(2): 37-44. | |
| 11 | 郑和, 李紫琪, 单以才, 等. 农田机械除草技术与装备研究现状与发展趋势[J/OL]. 南京农业大学学报, 1-13[2024-08-14]. . |
| ZHENG He, LI Ziqi, SHAN Yicai, et al. Current status and development trends of agricultural machinery weeding technologies and equipment [J/OL]. Journal of Nanjing Agricultural University, 1-13[2024-08-14]. . | |
| 12 | QUAN L Z, JIANG W, LI H L, et al. Intelligent intra-row robotic weeding system combining deep learning technology with a targeted weeding mode [J]. Biosystems Engineering, 2022, 216: 13-31. |
| 13 | ZHANG Q, XIA H, HUANG X G. The structure and realization of a compact weeding robot in stamping mode for paddy fields [M]// Lecture Notes in Electrical Engineering. Berlin, Heidelberg: Springer Berlin Heidelberg, 2011: 205-212. |
| 14 | 李江龙, 卢智琴, 鲍义东, 等. 履带式除草机器人高地隙移动平台机构优化设计[J]. 农业技术与装备, 2022(5): 22-26. |
| LI Jianglong, LU Zhiqin, BAO Yidong, et al. Mechanism optimization design of crawler weeding robot with high clearance moving platform [J]. Agricultural Technology & Equipment, 2022(5): 22-26. | |
| 15 | 刘永平, 许杰, 廖福林, 等. 新型果园除草机器人结构设计与切割仿真分析[J]. 农机化研究, 2020, 42(4): 28-32, 39. |
| LIU Yongping, XU Jie, LIAO Fulin, et al. Structural design and cutting simulation analysis of new orchard weeding robot [J]. Journal of Agricultural Mechanization Research, 2020, 42(4): 28-32, 39. | |
| 16 | HUANG P C, ZHU L X, ZHANG Z G, et al. An end-to-end learning-based row-following system for an agricultural robot in structured apple orchards [J]. Mathematical problems in engineering, 2021: 6221119. |
| 17 | 贺庆, 冀杰, 冯伟, 等. 割草机器人自适应时域MPC路径跟踪控制方法[J]. 智慧农业(中英文), 2024, 6(3): 82-93. |
| HE Qing, JI Jie, FENG Wei, et al. Adaptive time horizon MPC path tracking control method for mowing robot [J]. Smart Agriculture, 2024, 6(3): 82-93. | |
| 18 | 赵智宇, 朱立成, 周利明, 等. 丘陵果园除草机器人底盘系统设计与试验[J]. 农业机械学报, 2022, 53(S1): 48-57. |
| ZHAO Zhiyu, ZHU Licheng, ZHOU Liming, et al. Design and experiment of chassis control system for weeding robot in hilly orchard [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(S1): 48-57. | |
| 19 | 翁盛槟, 吴继团, 林晓亮, 等. 基于模糊控制的除草机器人自主导航系统研究[J]. 机械制造与自动化, 2022, 51(5): 152-154, 158. |
| WENG Shengbin, WU Jituan, LIN Xiaoliang, et al. Research on autonomous navigation system of weeding robot based on fuzzy control [J]. Machine building & automation, 2022, 51(5): 152-154, 158. | |
| 20 | 冀杰, 贺庆, 赵立军, 等. 除草机器人自适应快速积分终端滑模跟踪控制技术[J]. 农业机械学报, 2023, 54(6): 55-64. |
| JI Jie, HE Qing, ZHAO Lijun, et al. Adaptive fast integrating terminal sliding mode tracking control technique for weeding robot [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(6): 55-64. | |
| 21 | 张文莉, 陈树人, 褚德宏. 除草机器人研究现状与趋势[J]. 农业装备技术, 2015, 41(2): 6-10. |
| ZHANG Wenli, CHEN Shuren, Zhu Dehong. Research review on field weeding robot [J]. Agricultural Equipment & Technology, 2015, 41(2): 6-10. | |
| 22 | 宋德平, 王成, 孙冬霞, 等. 基于北斗导航的智能棉花播种机设计与试验[J]. 智能化农业装备学报(中英文), 2021, 2(1): 44-50. |
| SONG Deping, WANG Cheng, SUN Dongxia, et al. Design and test of intelligent cotton planter based on BeiDou navigation [J]. Journal of Intelligent Agricultural Mechanization(in Chinese and English), 2021, 2(1): 44-50. | |
| 23 | GUAN Z H, LI Y, MU S L, et al. Tracing algorithm and control strategy for crawler rice combine harvester auxiliary navigation system [J]. Biosystems Engineering, 2021, 211: 50-62. |
| 24 | 闫清东, 张连第, 赵毓芹. 坦克构造与设计(下册) [M]. 北京: 北京理工大学出版社, 2007. |
| 25 | ZENG G, GAI J T, HAN Z D, et al. The study of steering on ramp based on electric tracked vehicle[C]//SAE Technical Paper Series. 400 Commonwealth Drive, Warrendale, PA, United States: SAE International, 2020. |
| 26 | KIM H, KIM J, HAN K, et al. 1D modeling considering noise and vibration of vehicle window brushed DC motor [J]. Applied sciences, 2022, 12(22): 11405. |
| 27 | 张亮修, 吴光强, 郭晓晓. 自主车辆线性时变模型预测路径跟踪控制[J]. 同济大学学报(自然科学版), 2016, 44(10): 1595-1603. |
| ZHANG Liangxiu, WU Guangqiang, GUO Xiaoxiao. Path tracking using linear time-varying model predictive control for autonomous vehicle [J]. Journal of Tongji University (Natural Science), 2016, 44(10): 1595-1603. | |
| 28 | 曾根, 王伟达, 盖江涛, 等. 双侧电机耦合驱动履带车辆斜坡转向控制策略[J]. 兵工学报, 2021, 42(10): 2189-2195. |
| ZENG Gen, WANG Weida, GAI Jiangtao, et al. Steering on ramp control strategy of double motor coupling drive transmission for tracked vehicle [J]. Acta Armamentarii, 2021, 42(10): 2189-2195. | |
| 29 | 王平, 毛克彪, 郭中华, 等. GPS/北斗双模接收机在精细农业中的应用分析[J]. 农业展望, 2021, 17(12): 150-155. |
| WANG Ping, MAO Kebiao, GUO Zhonghua, et al. Application analysis of GPS/BD dual-mode receiver in precision agriculture [J]. Agricultural Outlook, 2021, 17(12): 150-155. |
| [1] | 马锃宏, 岳佳文, 殷程, 赵润茂, CHANDA Mulongoti, 杜小强. 基于不同拍摄角度多幅图像的果园视觉导航[J]. 智能化农业装备学报(中英文), 2024, 5(4): 51-65. |
| [2] | 崔思远, 曹蕾, 陈聪, 胡朝中, 沈诗逸, 曹光乔. 基于应用场景的丘陵山区农业机械化发展路径研究[J]. 智能化农业装备学报(中英文), 2024, 5(2): 1-8. |
| [3] | 冯爽, 张兆国, 孙连烛, 王法安, 解开婷. 基于GNSS/INS的拖拉机导向轮偏转角度测量系统设计与试验[J]. 智能化农业装备学报(中英文), 2024, 5(2): 33-41. |
| [4] | 刘羊, 刘宇洋, 陈江春, 李景彬, 林小卫, 蔺广兆. 标准化果园多功能作业平台关键技术研究现状与趋势[J]. 智能化农业装备学报(中英文), 2024, 5(1): 31-39. |
| [5] | 崔鑫宇, 崔冰波, 马振, 韩逸, 张建鑫, 魏新华. 几何路径跟踪组合算法及其农业机械自动导航应用[J]. 智能化农业装备学报(中英文), 2023, 4(3): 24-31. |
| [6] | 路梦源, 王天一, 陈新昌, 张宇卓, 宫泽奇, 张星山. 基于ROS和PX4的无人机编队协同飞行模型的仿真研究[J]. 智能化农业装备学报(中英文), 2023, 4(3): 32-41. |
| [7] | 张磊, 刘义亭, 陈光明, 李佩娟. 基于超声波传感器的巡检机器人导航纠偏研究[J]. 智能化农业装备学报(中英文), 2022, 3(2): 64-70. |
| [8] | 韩余, 宋志禹, 陈巧敏. 4CJ-1200F智能采茶机设计与试验[J]. 智能化农业装备学报(中英文), 2022, 3(1): 1-6. |
| [9] | 裴凤雀, 杨开伟, 王淼, 童一飞 . 智能制造在农业机械领域的应用现状分析[J]. 智能化农业装备学报(中英文), 2022, 3(1): 7-19. |
| [10] | 张隆梅, 刘岗微, 齐彦栋, 杨腾祥, 金诚谦. 农业机械无人驾驶系统关键技术研究进展[J]. 智能化农业装备学报(中英文), 2022, 3(1): 27-36. |
| [11] | 尤佳, 杜慎忠, 韩长杰, 邱威, 王秀. 基于自走式喷雾机的药液回收系统设计与试验*[J]. 智能化农业装备学报(中英文), 2020, 1(2): 34-43. |
| [12] | 罗锡文. 人工智能与植保机械化[J]. 智能化农业装备学报(中英文), 2020, 1(1): 1-6. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||