农业农村部主管 农业农村部南京农业机械化研究所主办
ISSN 2096-7217 CN 32-1887/S2
智能化农业装备学报(中英文) ›› 2024, Vol. 5 ›› Issue (4): 51-65.DOI: 10.12398/j.issn.2096-7217.2024.04.004
<a href="http://znhnyzbxb.niam.com.cn/CN/article/advancedSearchResult.do?searchSQL=(((马锃宏[Author]) AND 1[Journal]) AND year[Order])" target="_blank">马锃宏</a><sup>1</sup><sup>,</sup><sup>2</sup><sup>,</sup><sup>3</sup>(<a href="mailto:mzh2018@zstu.edu.cn"><img src="/images/email.png" border="0" /></a>), <a href="http://znhnyzbxb.niam.com.cn/CN/article/advancedSearchResult.do?searchSQL=(((岳佳文[Author]) AND 1[Journal]) AND year[Order])" target="_blank">岳佳文</a><sup>1</sup><sup>,</sup><sup>2</sup><sup>,</sup><sup>3</sup>, <a href="http://znhnyzbxb.niam.com.cn/CN/article/advancedSearchResult.do?searchSQL=(((殷程[Author]) AND 1[Journal]) AND year[Order])" target="_blank">殷程</a><sup>1</sup><sup>,</sup><sup>2</sup><sup>,</sup><sup>3</sup>, <a href="http://znhnyzbxb.niam.com.cn/CN/article/advancedSearchResult.do?searchSQL=(((赵润茂[Author]) AND 1[Journal]) AND year[Order])" target="_blank">赵润茂</a><sup>1</sup><sup>,</sup><sup>2</sup><sup>,</sup><sup>3</sup>, <span>CHANDA Mulongoti</span><sup>1</sup><sup>,</sup><sup>2</sup><sup>,</sup><sup>3</sup><span>, </span> <a href="http://znhnyzbxb.niam.com.cn/CN/article/advancedSearchResult.do?searchSQL=(((杜小强[Author]) AND 1[Journal]) AND year[Order])" target="_blank">杜小强</a><sup>1</sup><sup>,</sup><sup>2</sup><sup>,</sup><sup>3</sup>(<a href="mailto:xqiangdu@zstu.edu.cn"><img src="/images/email.png" border="0" /></a>)
MA Zenghong1,2,3( ), YUE Jiawen1,2,3, YIN Cheng1,2,3, ZHAO Runmao1,2,3, CHANDA Mulongoti1,2,3, DU Xiaoqiang1,2,3()
), YUE Jiawen1,2,3, YIN Cheng1,2,3, ZHAO Runmao1,2,3, CHANDA Mulongoti1,2,3, DU Xiaoqiang1,2,3()
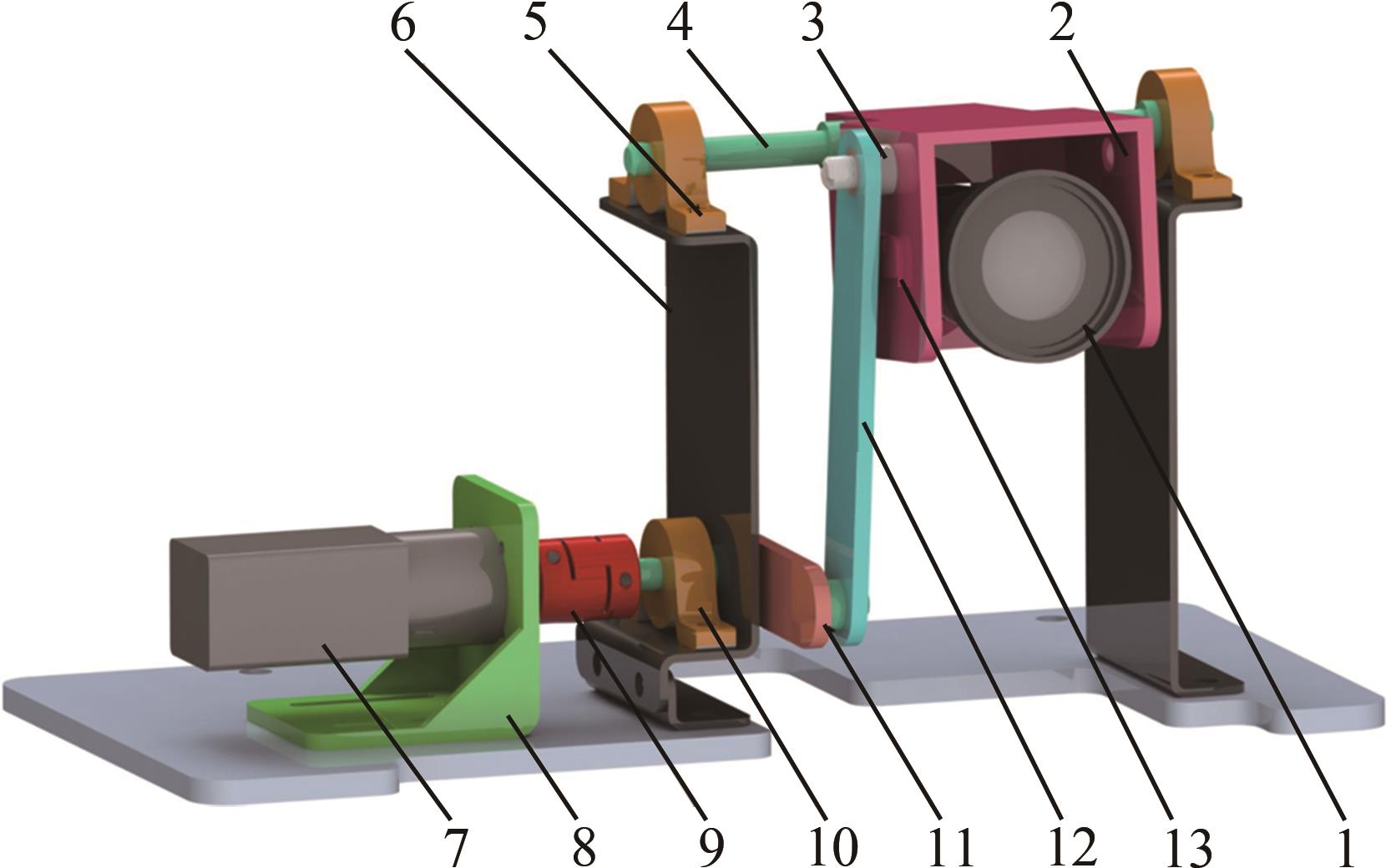
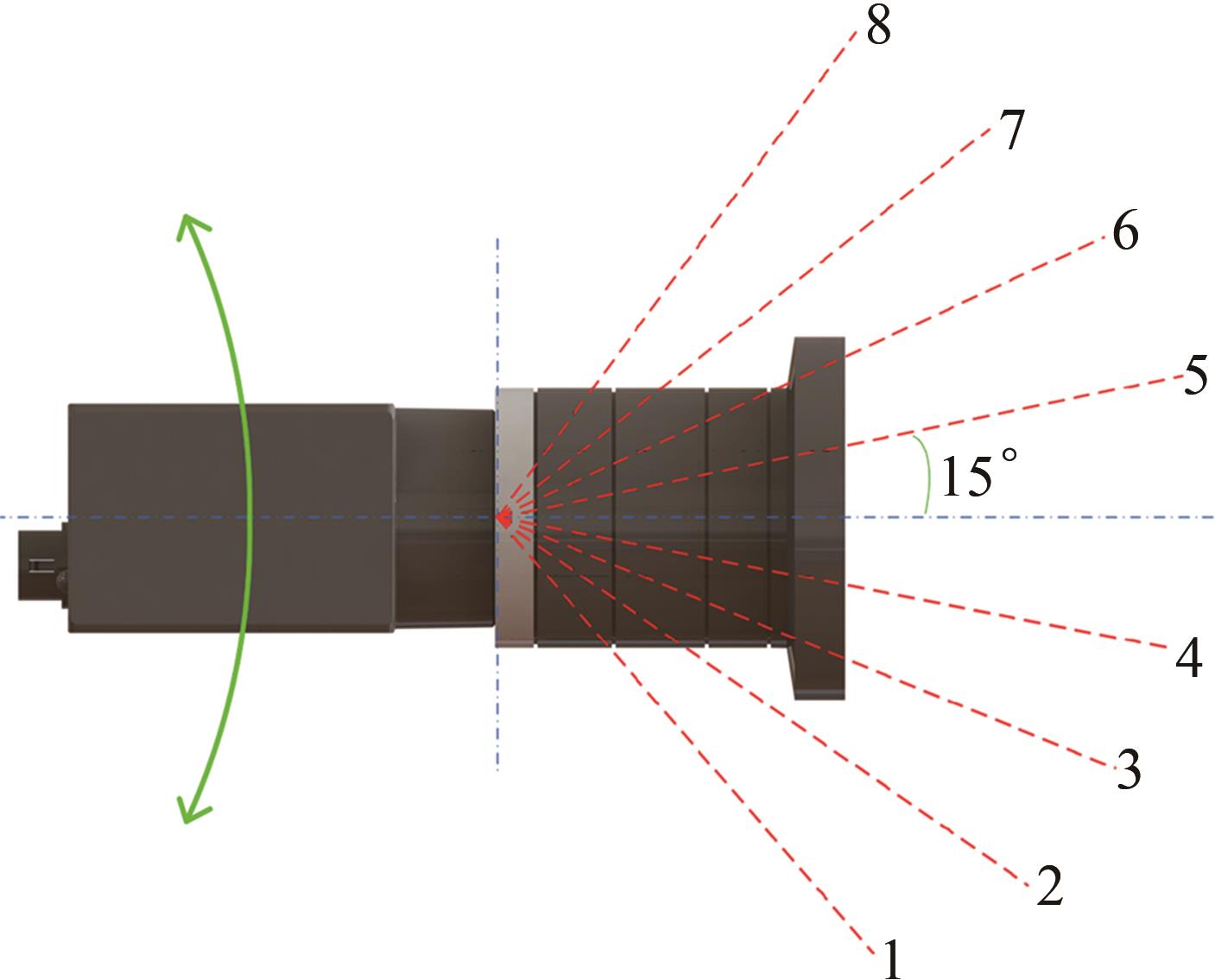
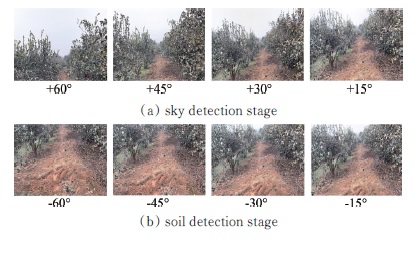
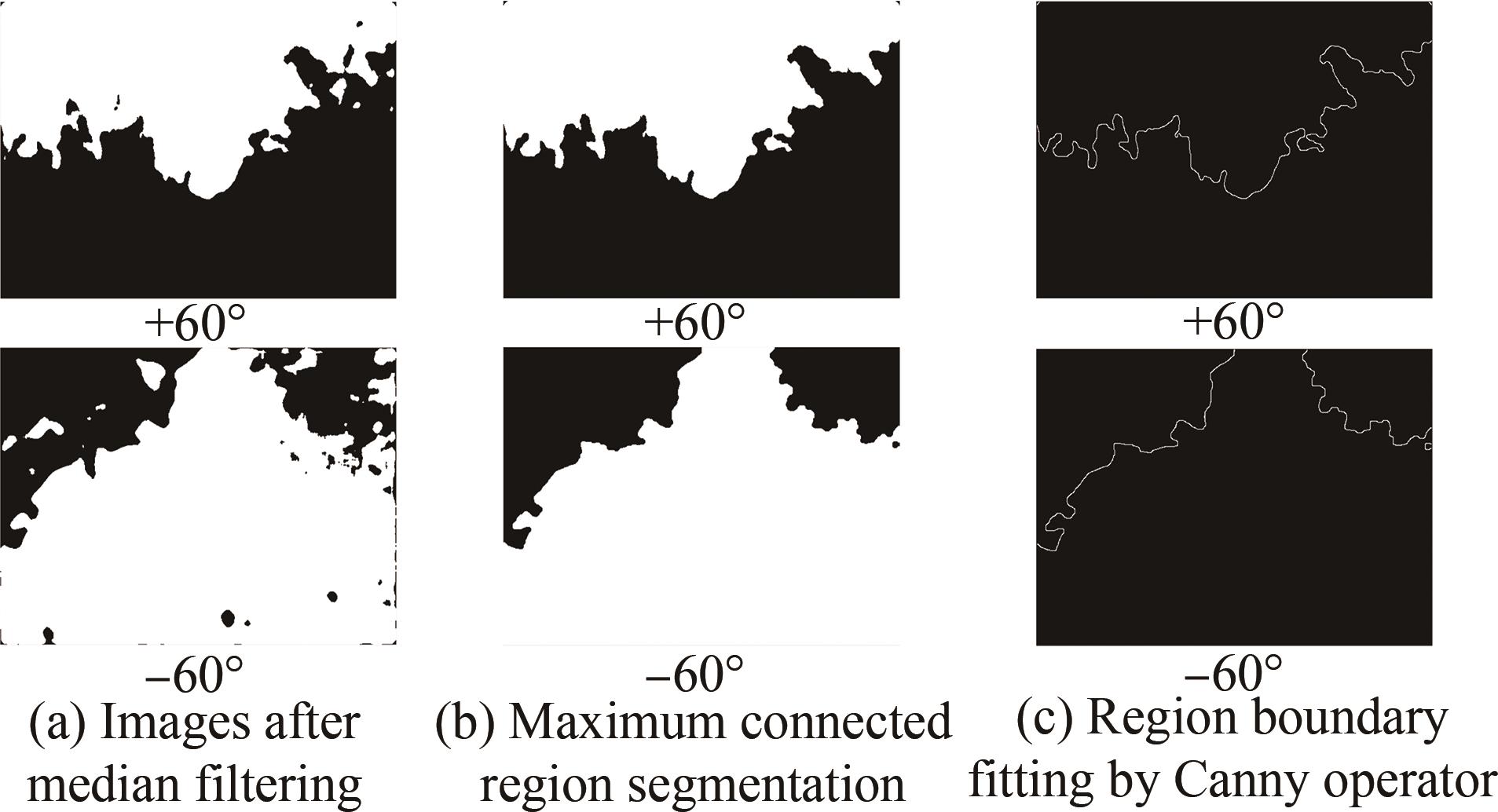
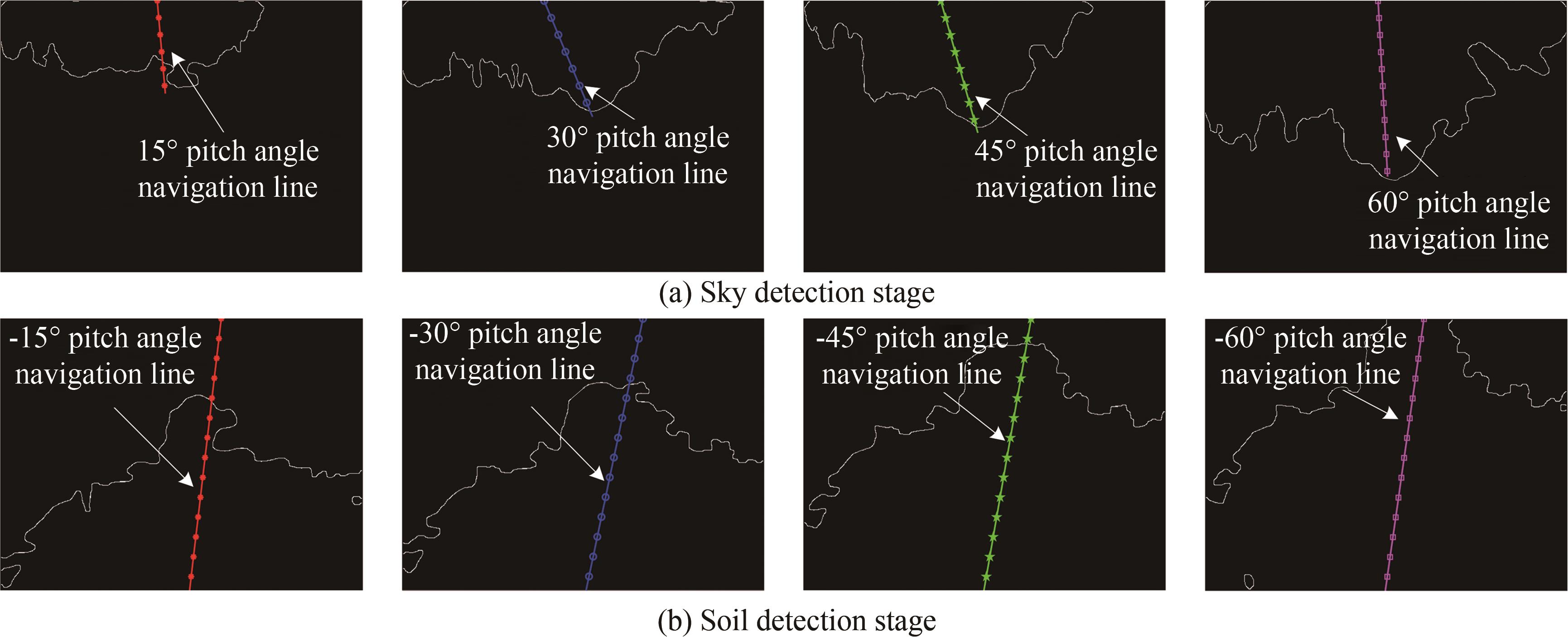
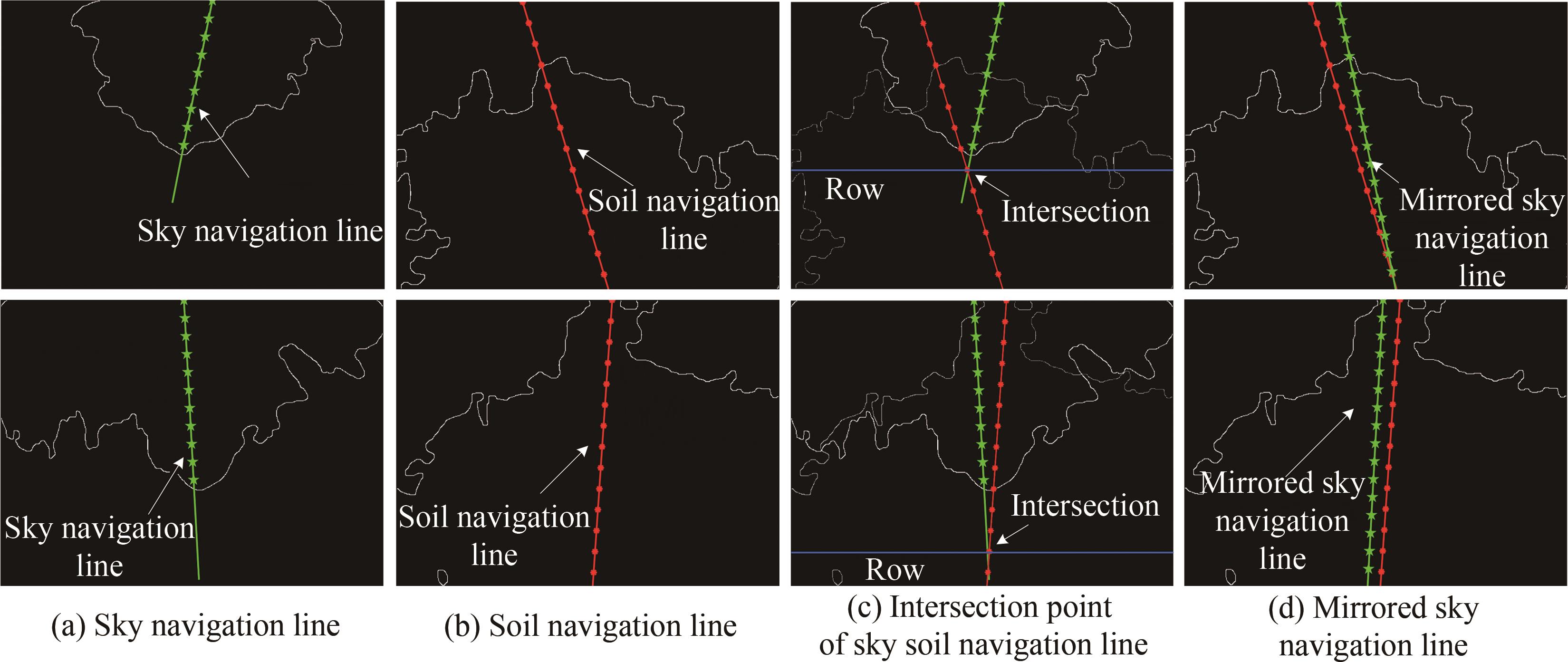
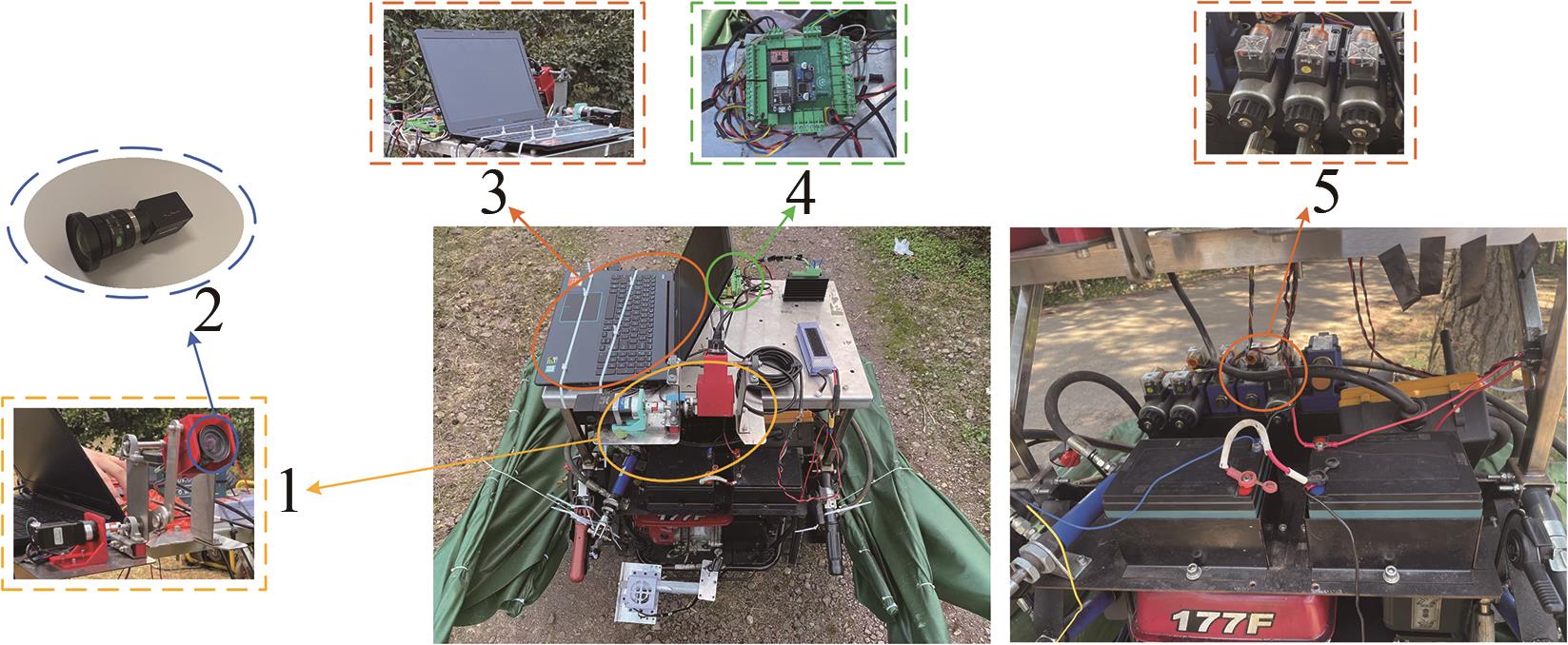
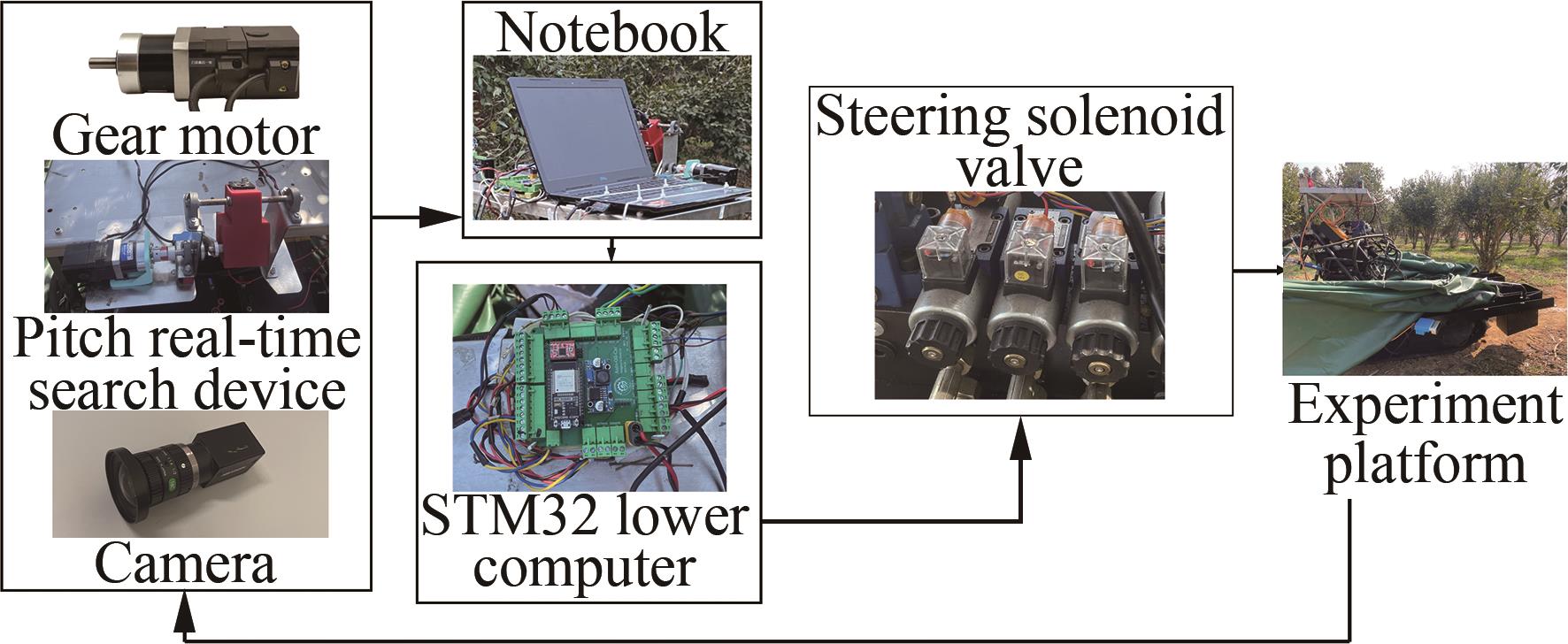
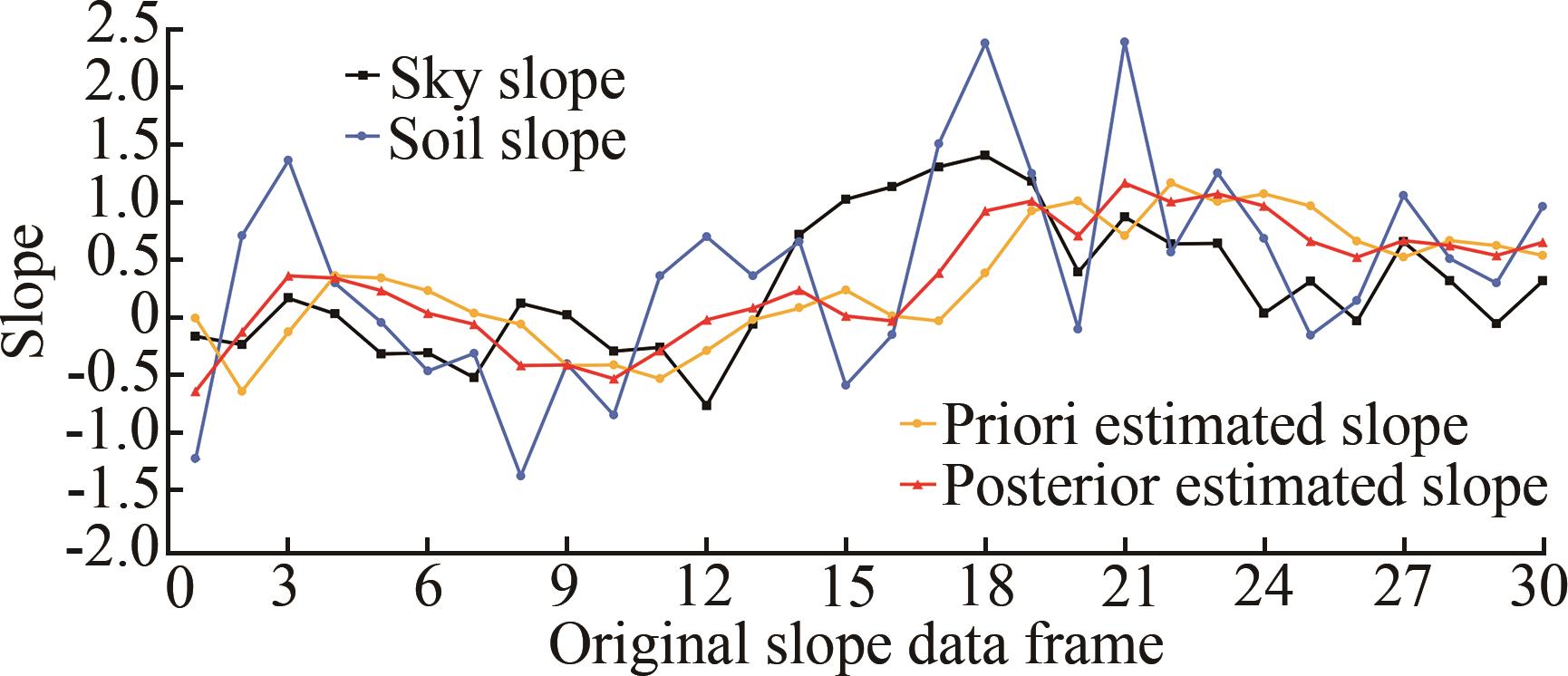
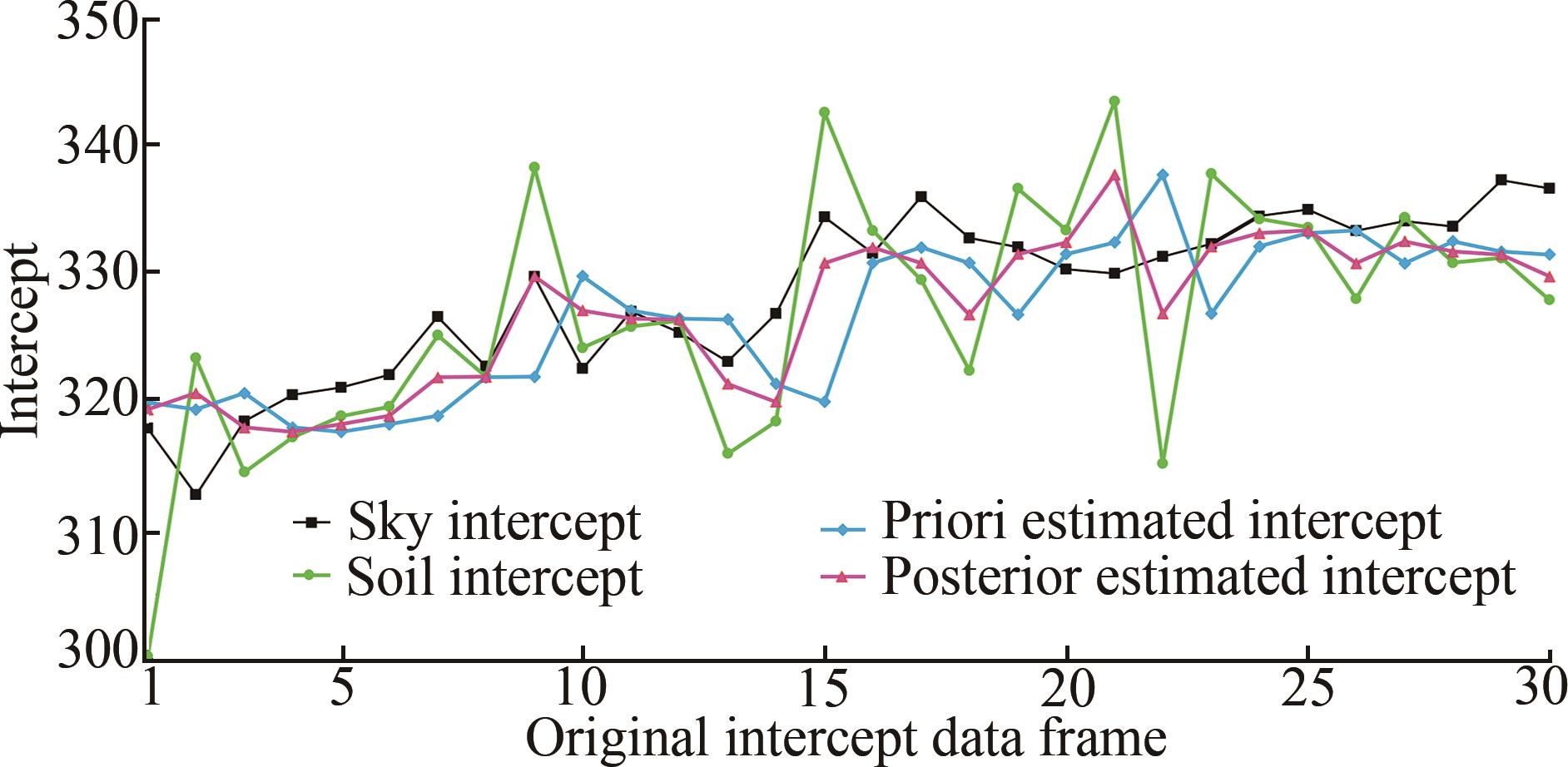
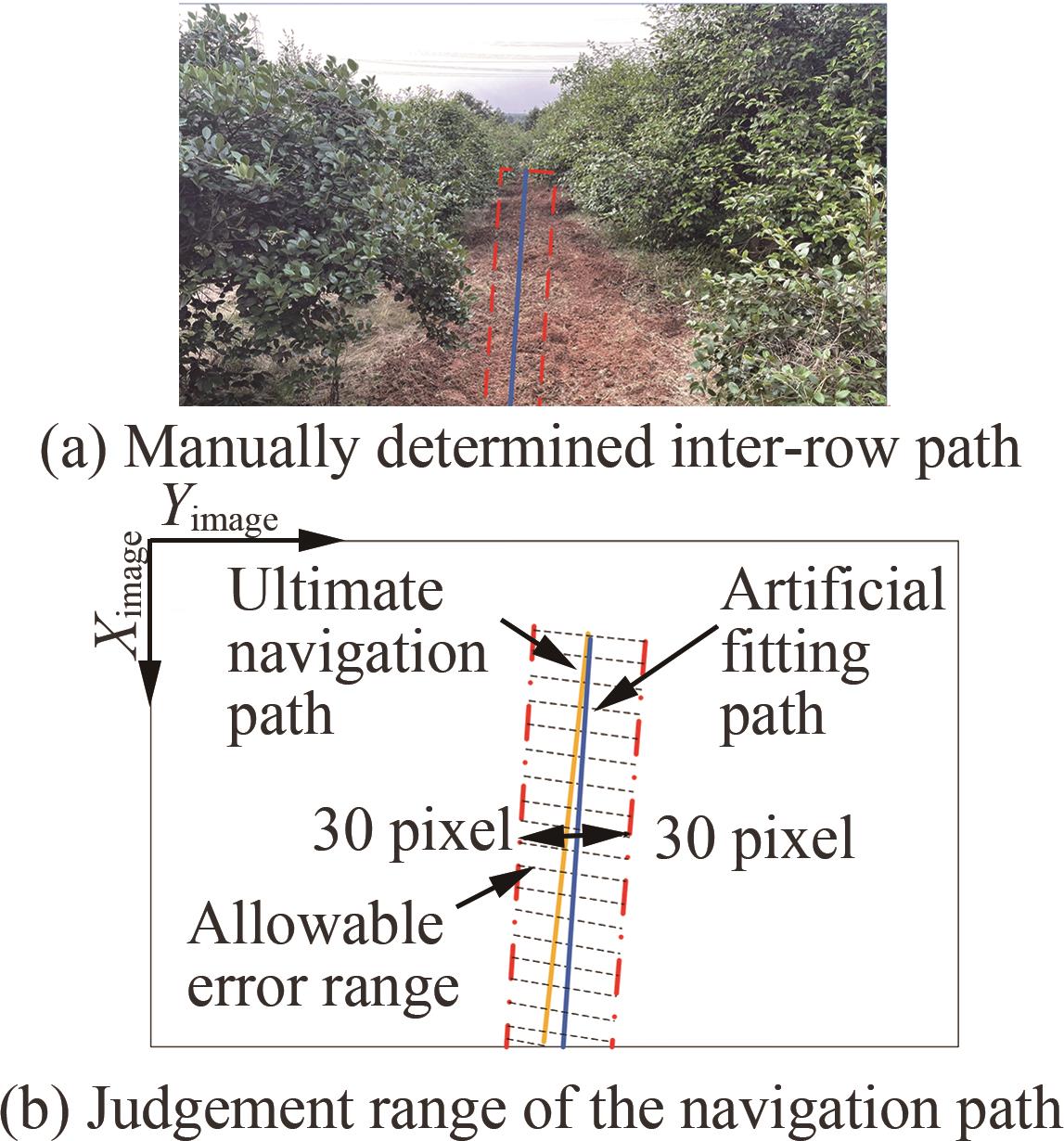
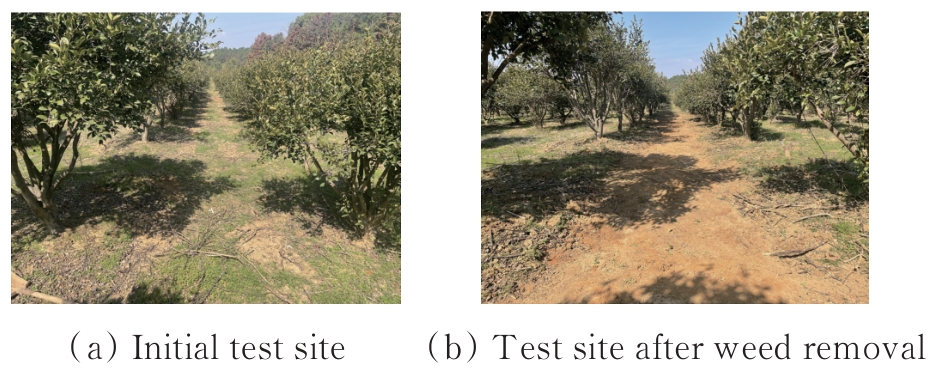
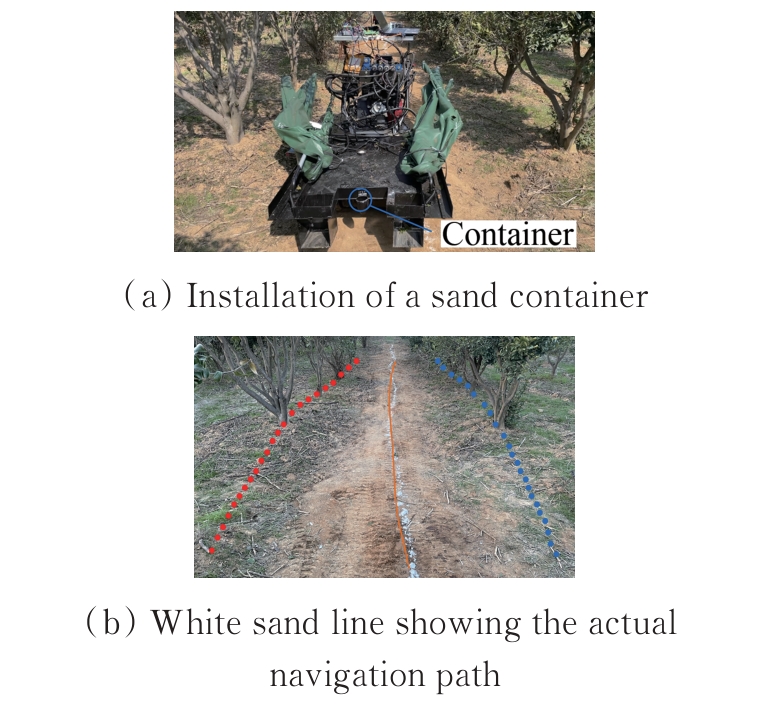
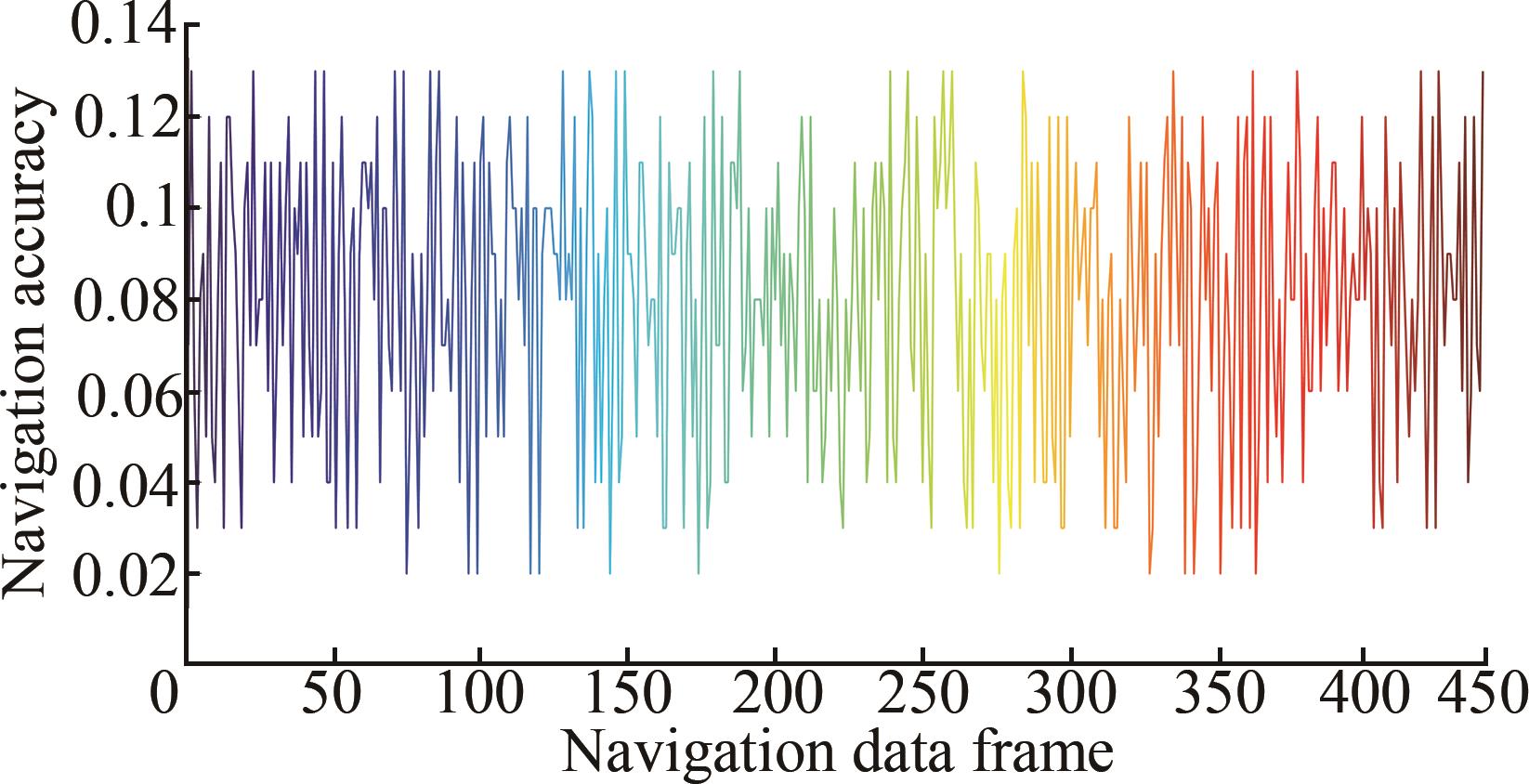
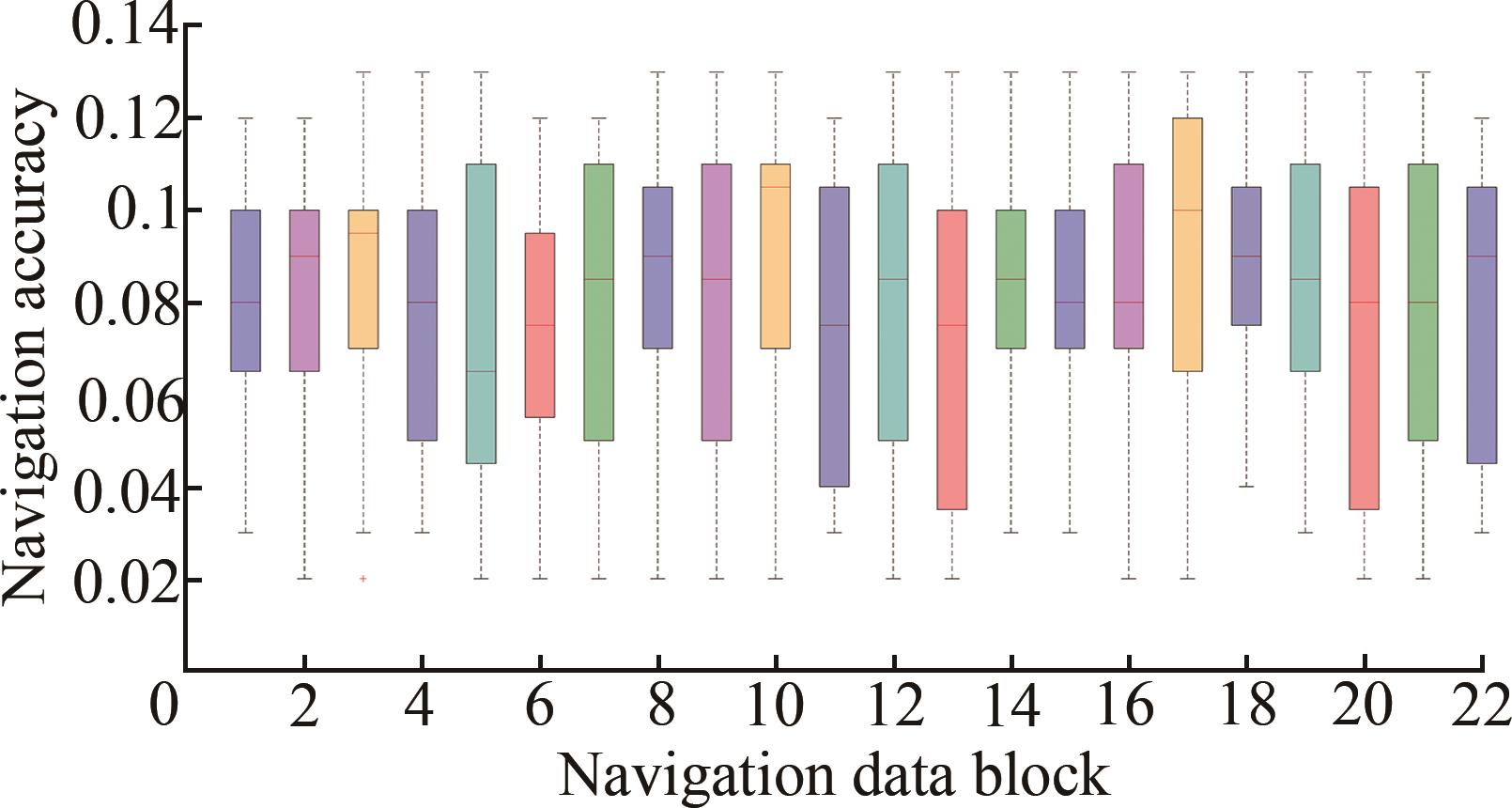
摘要: 果园通常地形崎岖,树冠茂密,杂草丛生。由于信号遮挡、多径效应和射频干扰,GNSS难以在果园中进行自主导航。为了实现果园的自主导航,本文提出了一种基于不同拍摄角度下多幅图像的视觉导航方法。一种动态图像捕捉设备是为安装相机而设计的,可以在不同角度拍摄多个图像。首先,将获得的果园图像分为天空和土壤检测阶段。每个图像被转换到HSV空间,并通过中值滤波和形态学处理初步分割为天空、树冠和土壤区域。其次,利用最大连通区域算法提取天空和土壤区域,并利用Canny算子对区域边缘进行检测和滤波。第三,通过对区域坐标点的拟合,提取当前帧数中的导航线。然后使用动态加权滤波算法分别提取土壤和天空检测阶段的导航线,并将天空检测阶段导航线镜像到土壤区域。最后,利用卡尔曼滤波算法对最终导航路径进行融合提取。对200幅图像的测试结果表明,视觉导航路径拟合的准确率为95.5%,单帧图像处理耗时60 ms,满足导航的实时性和鲁棒性要求。在油茶园进行的视觉导航实验表明,当行驶速度为0.6 m/s时,无杂草和杂草环境下视觉导航的最大跟踪偏移量分别为0.14 m和0.24 m,均方根误差分别为30 mm和55 mm。
中图分类号: