ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2023, Vol. 4 ›› Issue (4): 57-64.DOI: 10.12398/j.issn.2096-7217.2023.04.008
Previous Articles Next Articles
HUANG Minghui1( ), TANG Qing1,2, SONG Zhewen1, LIU Hao1, WU Yang1, ZHU Tingwei2
), TANG Qing1,2, SONG Zhewen1, LIU Hao1, WU Yang1, ZHU Tingwei2
Received:2023-07-03
Revised:2023-09-29
Online:2023-11-15
Published:2023-11-15
About author:HUANG Minghui,E-mail: huangminghui@changlin.com.cn
CLC Number:
HUANG Minghui, TANG Qing, SONG Zhewen, LIU Hao, WU Yang, ZHU Tingwei. Development status and trends of the development of seedling pick-up mechanism of transplanter in dry land[J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(4): 57-64.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2023.04.008
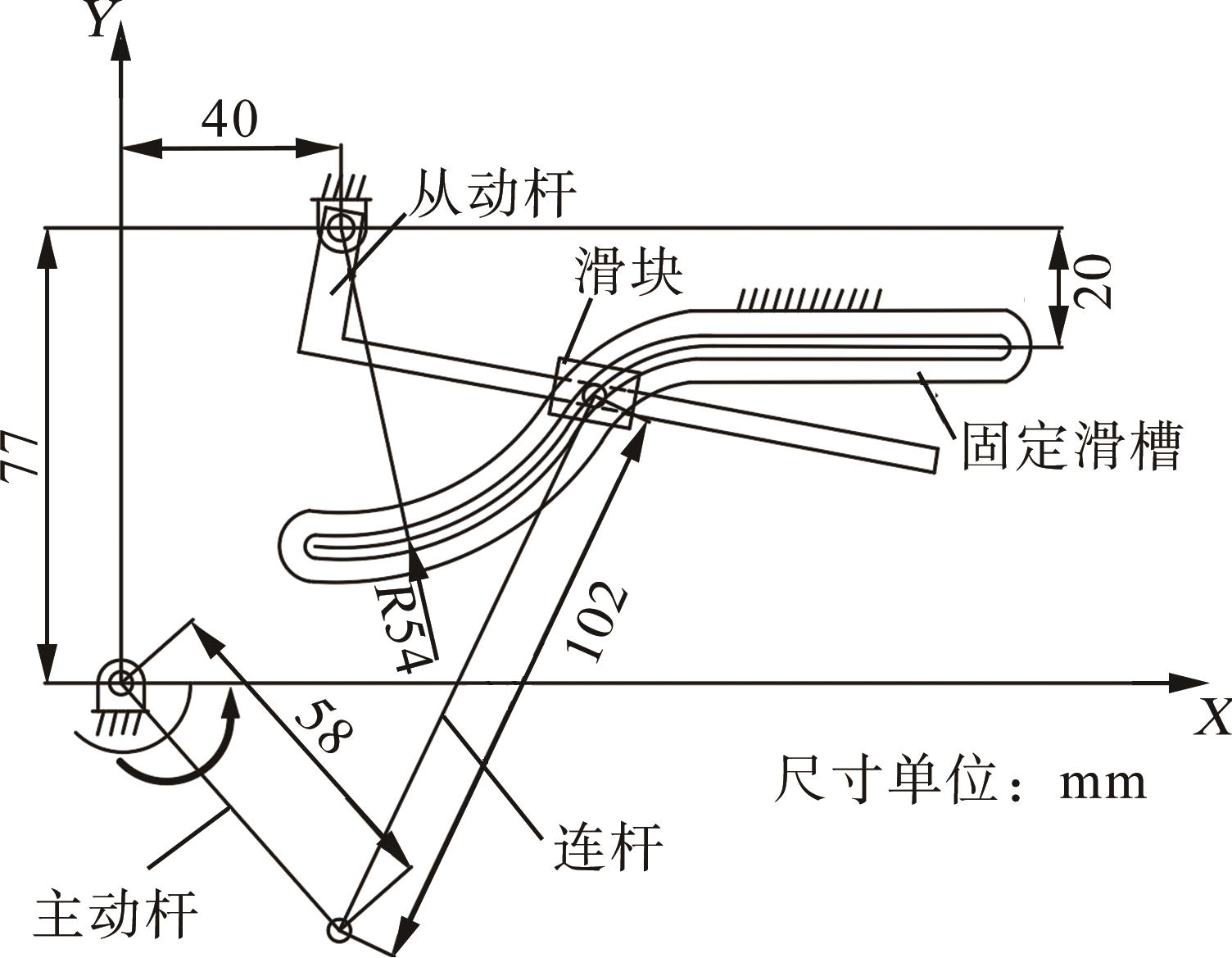
Figure 1 Five–bar seedling pick-up mechanism
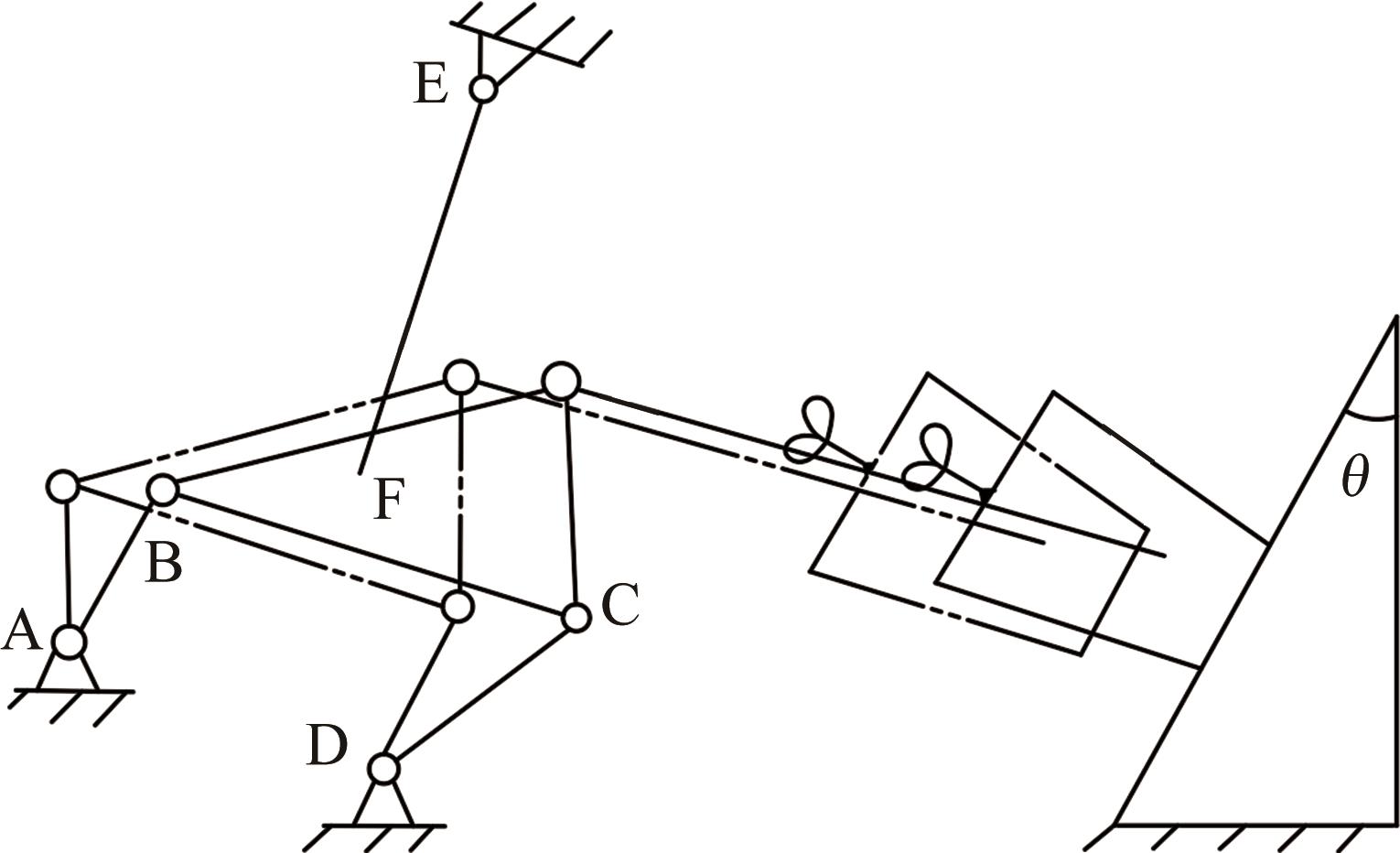
Figure 2 Four–bar seedling pick-up mechanism
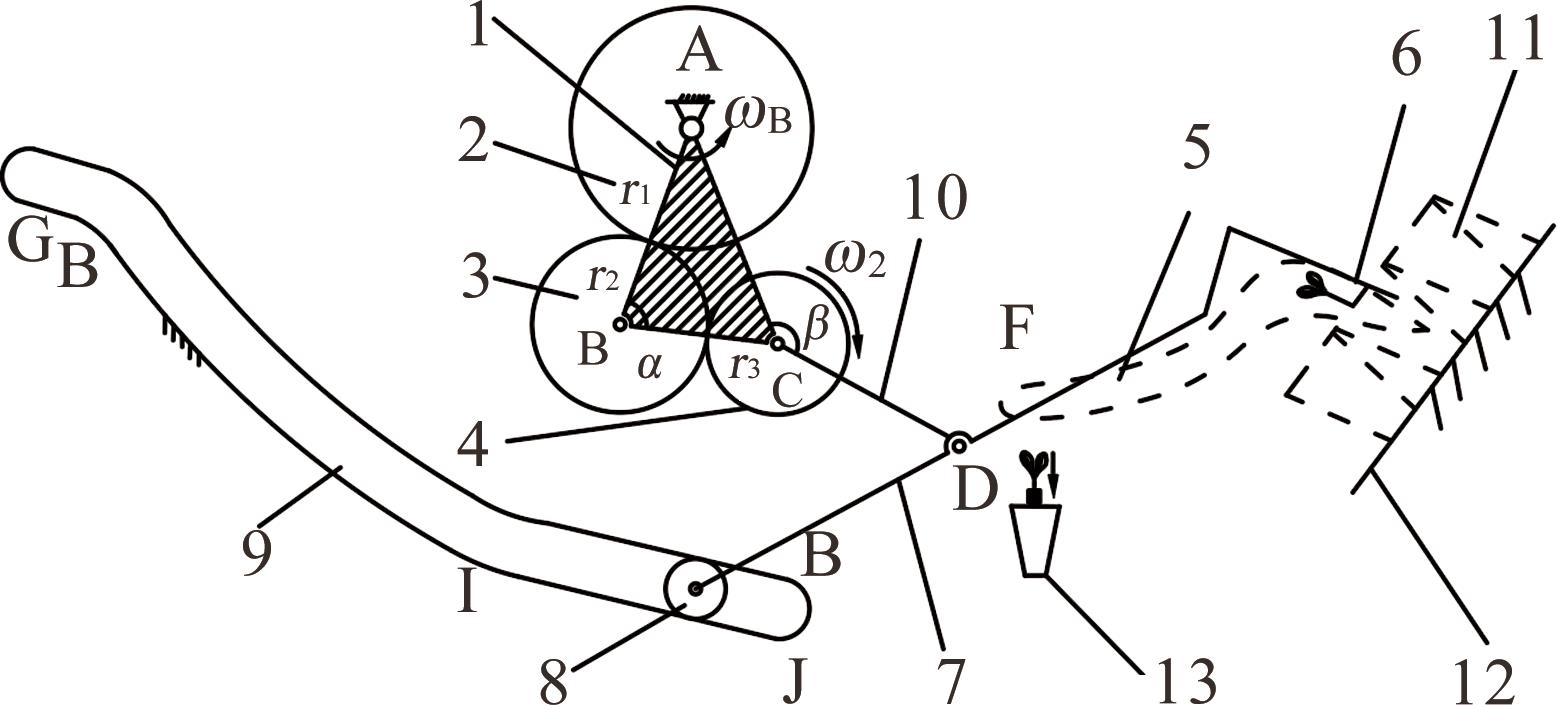
Fig.3 Chute-cam seedling pick-up mechanism
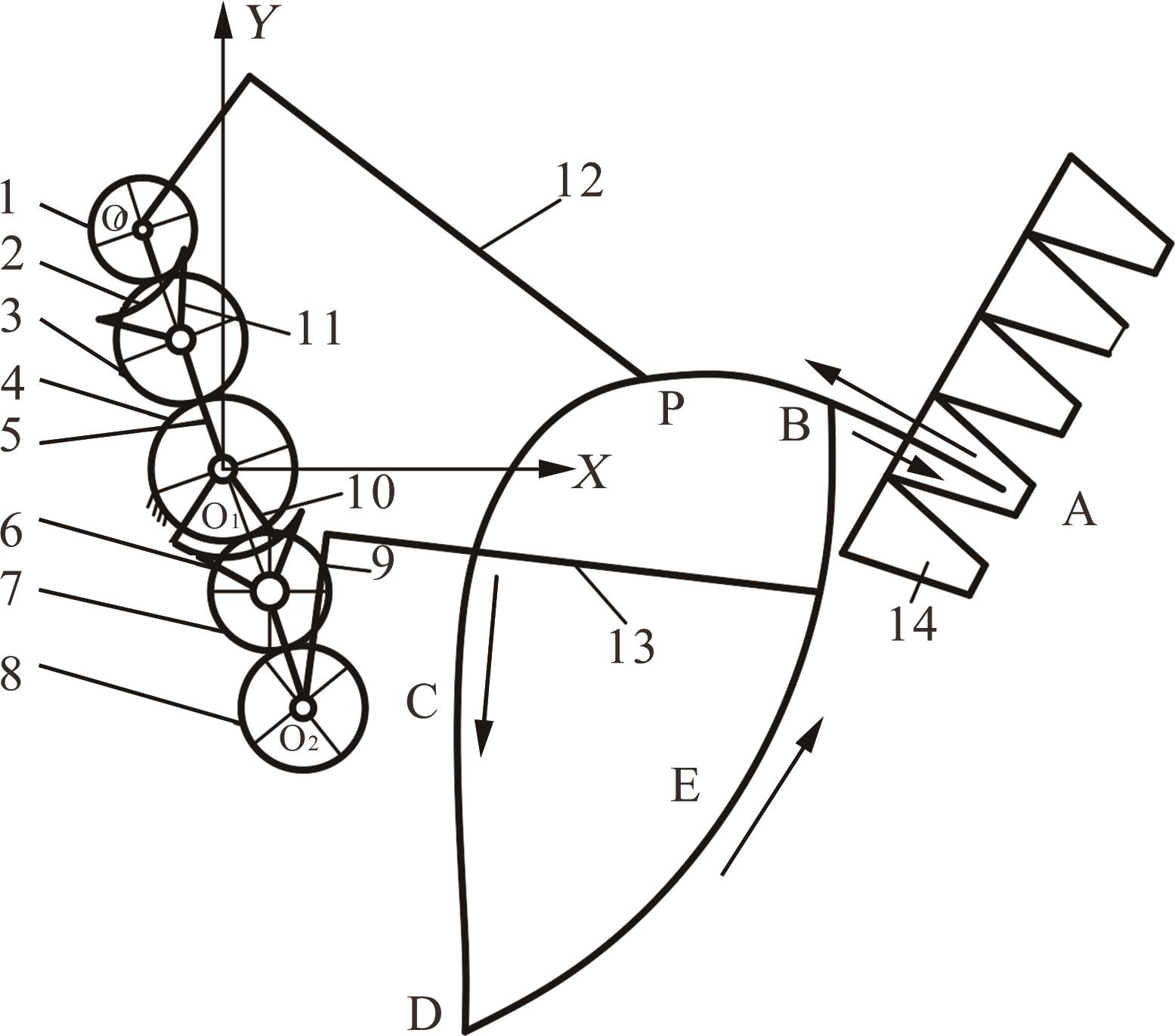
Figure 4 Planetary gear seedling pick-up mechanism
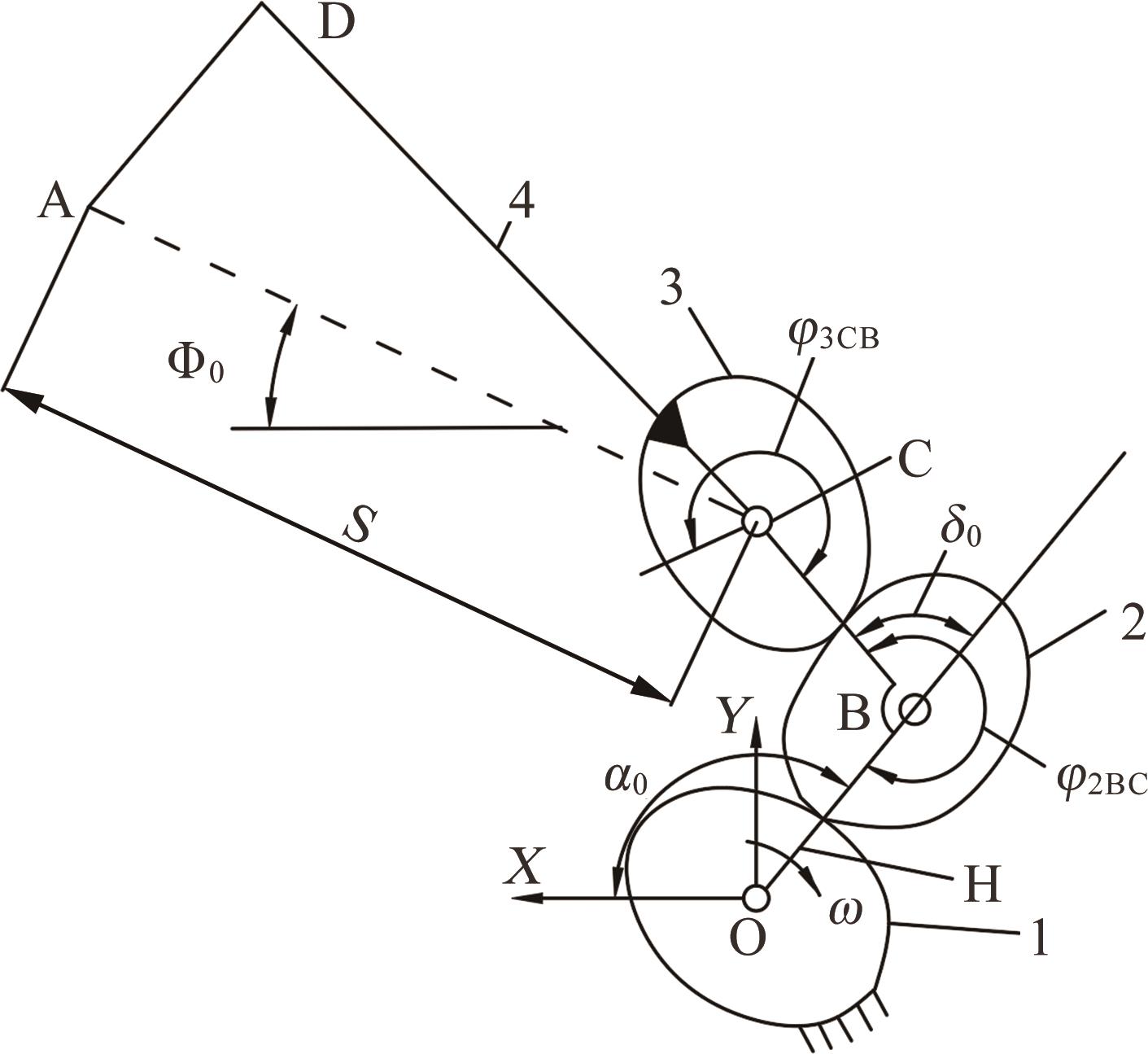
Figure 5 Initial position of seedling pick-up mechanism
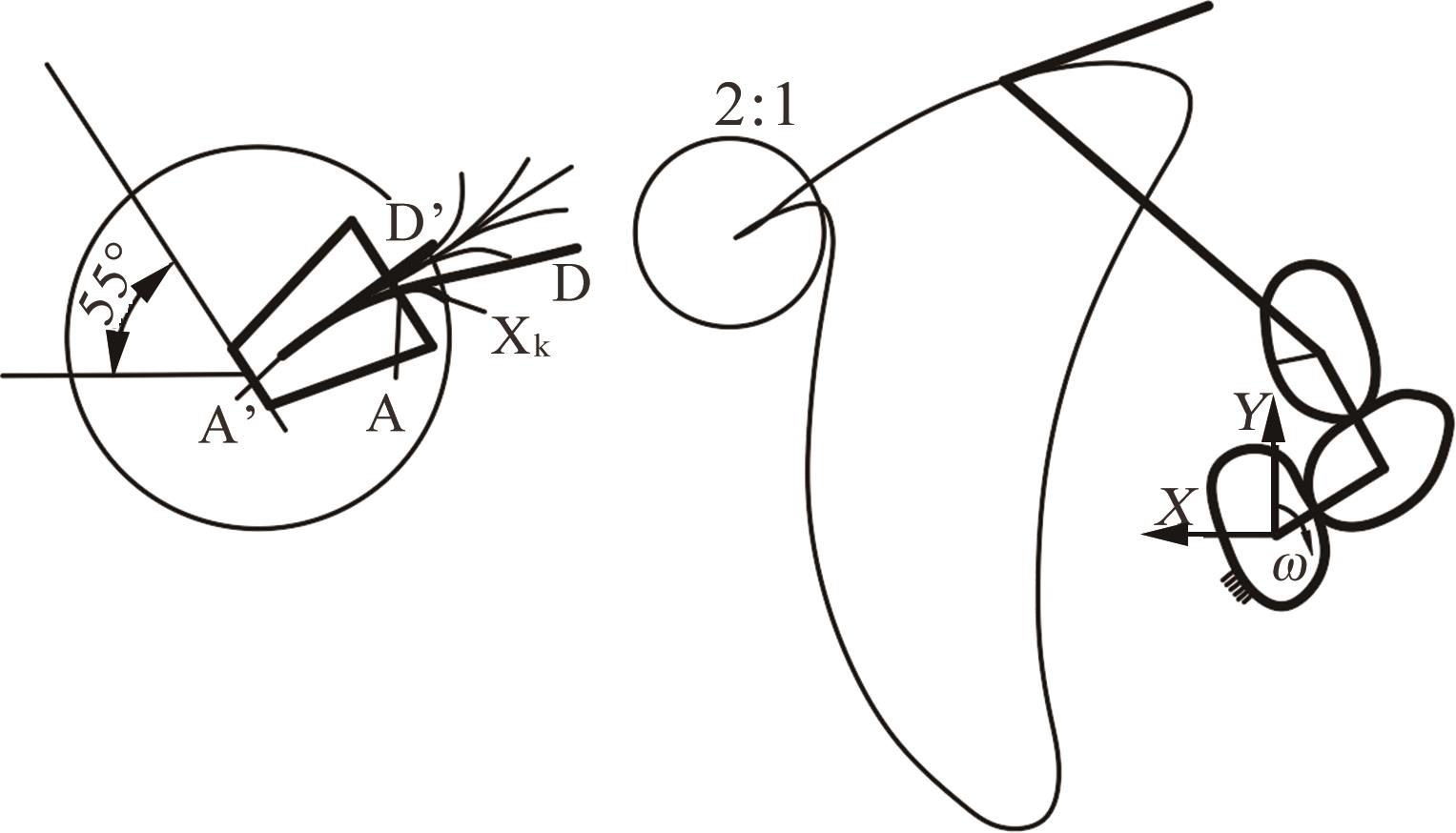
Figure 6 Trajectory of seedling pick-up mechanism
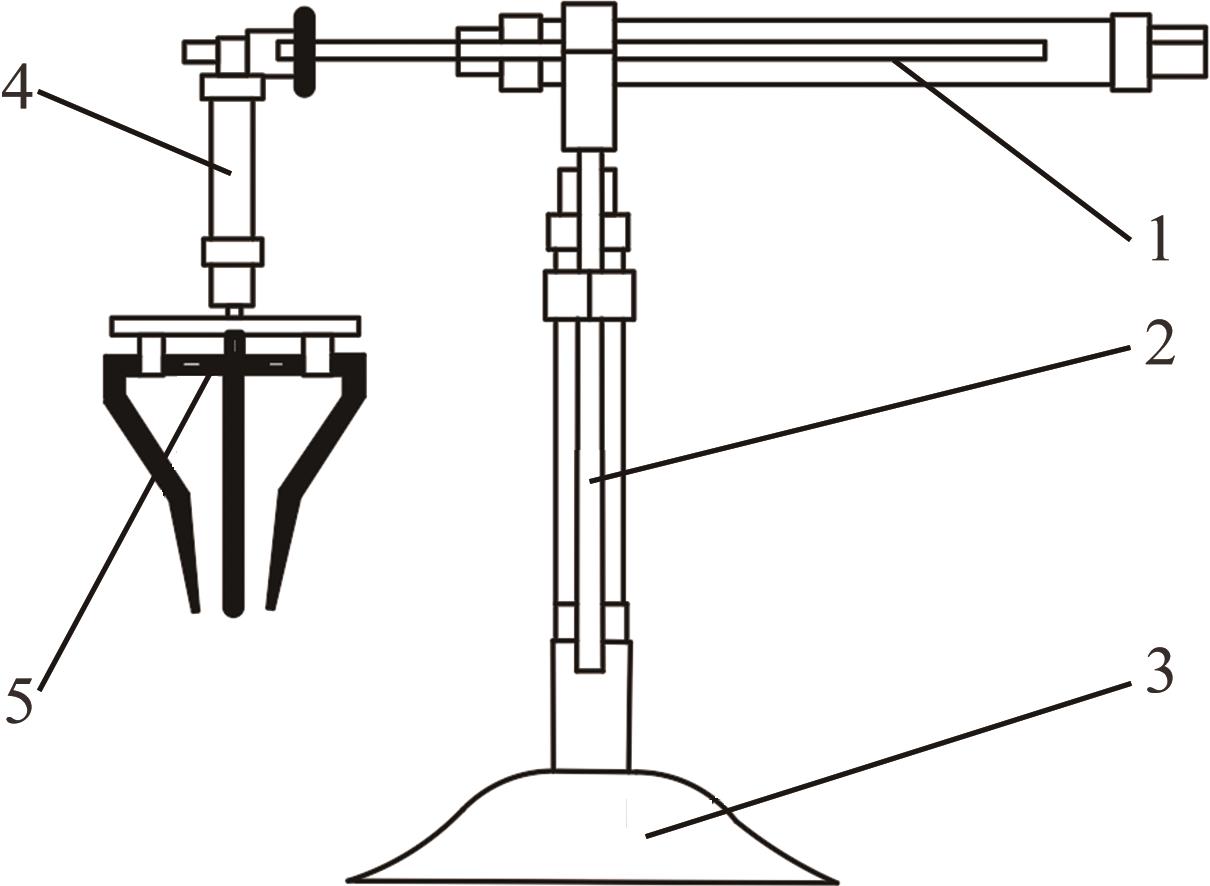
Figure 7 Pneumatic seedling pick-up mechanism
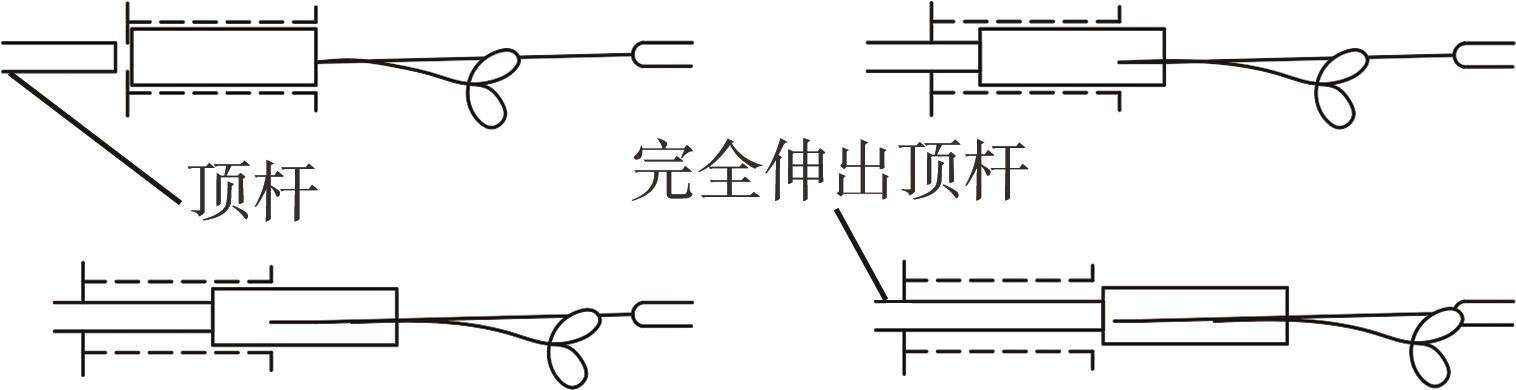
Figure 8 Process of pushing out seedling by top pole
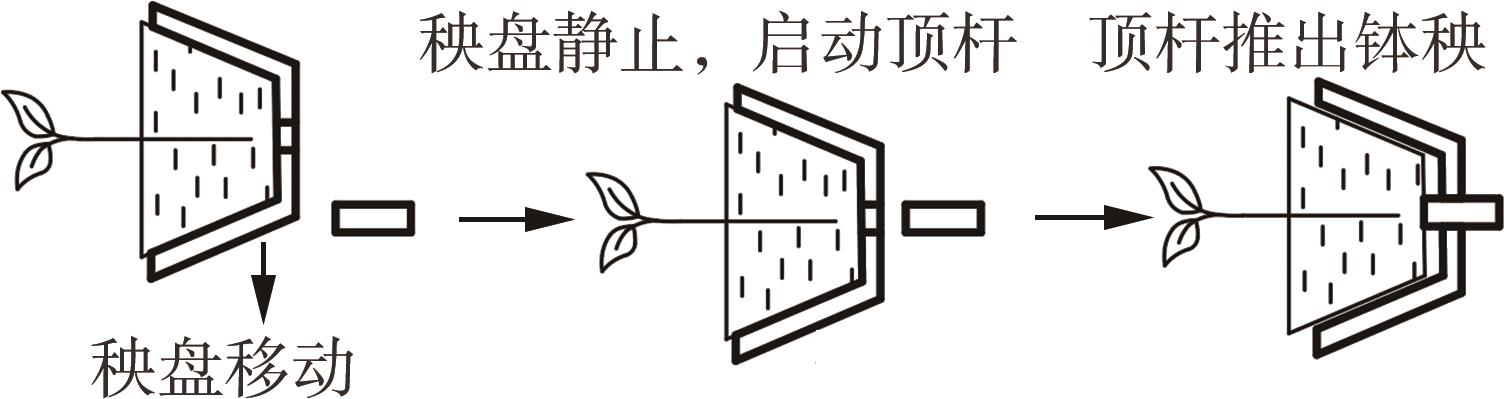
Figure 9 Schematic diagram of jacking out
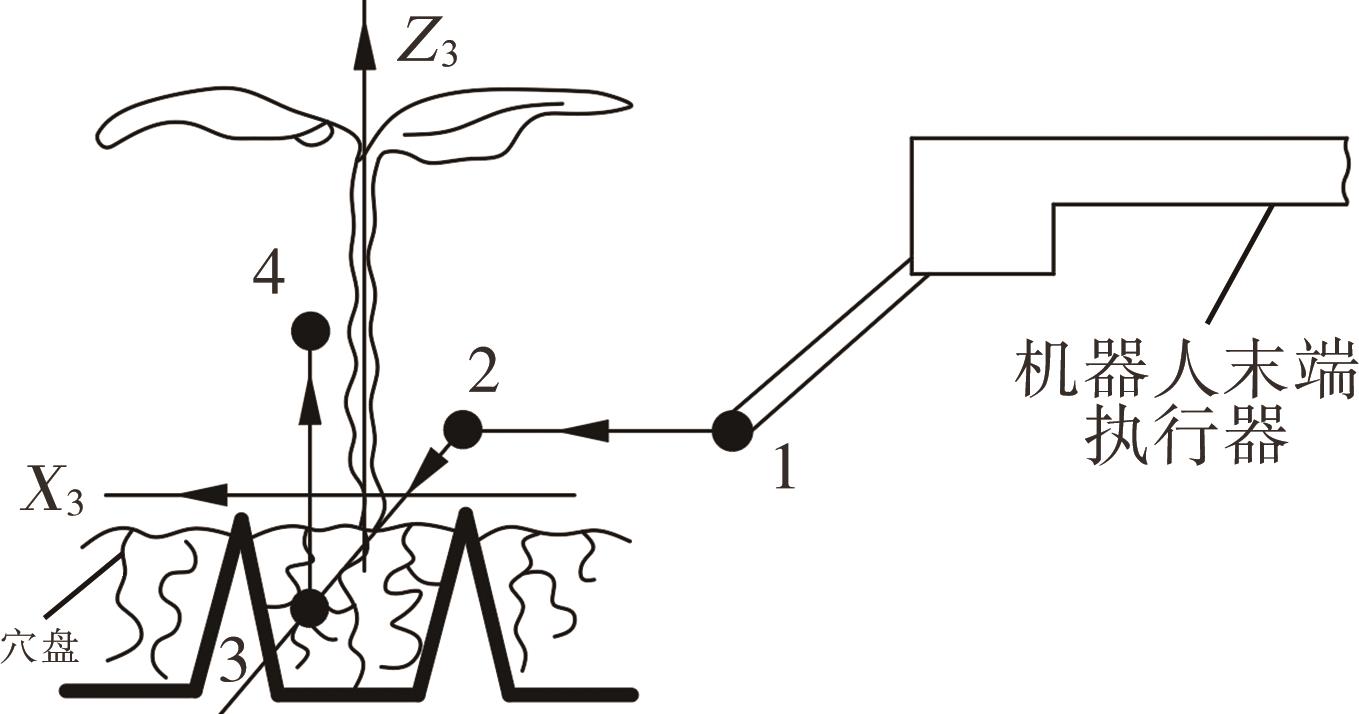
Figure 10 Robot seedling pick-up process
| 序号 | 取苗机构类型 | 优点 | 缺点 |
|---|---|---|---|
| 1 | 连杆式取苗机构 | 结构简单成本低,可实现复杂取苗轨迹 | 结构尺寸大,取苗速度受限 |
| 2 | 行星齿轮系取苗机构 | 结构尺寸小,取苗速度快 | 取苗轨迹受限 |
| 3 | 气动式取苗机构 | 结构简单 | 取苗轨迹单一,无法实现复杂轨迹 |
| 4 | 顶杆式取苗机构 | 取苗速度快 | 直线轨迹,只适应于后顶式取苗方式 |
| 5 | 夹取式取苗机构 | 秧苗适应性强,可适应于多种形态秧苗 | 轨迹要求复杂,取苗速度受限 |
| 6 | 移栽取苗机器人 | 取苗速度快,取苗轨迹可控性好 | 机电液一体化结构复杂,成本高 |
Table 1 Performance comparison of seedling taking mechanism
| 序号 | 取苗机构类型 | 优点 | 缺点 |
|---|---|---|---|
| 1 | 连杆式取苗机构 | 结构简单成本低,可实现复杂取苗轨迹 | 结构尺寸大,取苗速度受限 |
| 2 | 行星齿轮系取苗机构 | 结构尺寸小,取苗速度快 | 取苗轨迹受限 |
| 3 | 气动式取苗机构 | 结构简单 | 取苗轨迹单一,无法实现复杂轨迹 |
| 4 | 顶杆式取苗机构 | 取苗速度快 | 直线轨迹,只适应于后顶式取苗方式 |
| 5 | 夹取式取苗机构 | 秧苗适应性强,可适应于多种形态秧苗 | 轨迹要求复杂,取苗速度受限 |
| 6 | 移栽取苗机器人 | 取苗速度快,取苗轨迹可控性好 | 机电液一体化结构复杂,成本高 |
| 1 | ORZOLEK M D. Stand establishment in plasticulture systems [J]. HortTechnology, 1996, 6(3): 181-185. |
| 2 | KUMAR G V P, RAHEMAN H. Vegetable transplanters for use in developing countries—A review [J]. International Journal of Vegetable Science, 2008, 14(3): 232-255. |
| 3 | MANES G S, DIXIT A K, SINGH S, et al. Development and evaluation of tractor operated vegetable transplanter [J]. Ama, Agricultural Mechanization in Asia, Africa & Latin America, 2010, 41(3): 89. |
| 4 | PARISH R L. Current developments in seeders and planters for vegetable crops[J]. HortTechnology, 2005, 15(2): 1-6. |
| 5 | 李其昀. 机械化育苗移栽的现状与展望[J]. 农机化研究, 2006(3): 26-27. |
| LI Qijun. The present status and development tendency of bowl-rear transplanting mechanization [J]. Journal of Agricultural Mechanization Research, 2006(3): 26-27. | |
| 6 | KUMAR G V P, RAHEMAN H. Vegetable transplanters for use in developing countries—A review [J]. International Journal of Vegetable Science, 2008, 14(3): 232-255. |
| 7 | 胡敏娟, 尹文庆, 胡飞, 等. 穴盘苗自动取苗试验系统的研制[J]. 南京农业大学学报, 2011, 34(3): 122-126. |
| HU Minjuan, YIN Wenqing, HU Fei, et al. Development of test system for automatic pick-up plug seedlings [J]. Journal of Nanjing Agricultural University, 2011, 34(3): 122-126. | |
| 8 | TSUGA K. Development of fully automatic vegetable transplanter [J]. Japan Agricultural Research Quarterly, 2000, 34(1): 21-28. |
| 9 | SUGGS C W, LINEBERGER B M, MOHAPATRA S C. Automatic feeding transplanter [J]. Acta Horticulturae, 1992(319): 511-516. |
| 10 | PARISH R L. Current developments in seeders and transplanters for vegetable crops [J]. HortTechnology, 2005, 15(2): 346-351. |
| 11 | MANILLA R D, SHAW L N. A high-speed dibbling transplanter [J]. Transactions of the ASAE, 1987, 30(4): 904-908. |
| 12 | HUANG, B K, SPLINTER W E. Development of an automatic transplanter [J]. Transactions of the ASABE, 1968(11): 191-194. |
| 13 | KUIKEN J C J. Project for an automatic soil block planter, machinery and equipment [J]. Institution Tuinboutechniek, 1969(35): 34-37. |
| 14 | KIM H J, PARK S H, KWAK T Y. Development of an automatic transplanter for cabbage cultivation [C]// Korea Automatic Dynamic Analysis of Mechanical Systems Conference. 2001, 1: 8-9. |
| 15 | EDATHIPARAMBIL V T. Development of a mechanism for transplanting rice seedlings [J]. Mechanism and Machine Theory, 2002, 37(4): 395-410. |
| 16 | ERDMAN ARTHUR G., GEORGE N.. Mechanism design: analysis and synthesis [M]. Prentice Hall, 2001. |
| 17 | NORTON R. Design of machinery [M]. New York, 1998. |
| 18 | PAUL B. Kinematics and dynamics of planar machinery [J]. 1979. |
| 19 | HIRSCHHORN J. Kinematics and dynamics of plane mechanisms [J]. 1962. |
| 20 | CHOI W C, KIM D C, RYU I H, et al. Development of a seedling pick–up device for vegetable transplanters [J]. Transactions of the ASAE, 2002, 45(1): 13. |
| 21 | 徐丽明, 张铁中, 史志清. 玉米自动移栽机取苗机构的设计[J]. 中国农业大学学报, 2000(4): 58-60. |
| XU Liming, ZHANG Tiezhong, SHI Zhiqing. Design on the picking seedling machinery in the maize auto transplanter [J]. Journal of China Agricultural University, 2000(4): 58-60. | |
| 22 | 丁文芹, 毛罕平, 胡建平, 等. 穴盘苗自动移栽机的结构设计及运动仿真分析[J]. 农机化研究, 2011, 33(10): 75-77, 137. |
| DING Wenqin, MAO Hanping, HU Jianping, et al. Structure design and simulation analysis on the plug seedlings auto-transplanter [J]. Journal of Agricultural Mechanization Research, 2011, 33(10): 75-77, 137. | |
| 23 | MOUSAVI A, AKBARZADEH A, SHARIATEE M, et al. Repeatability analysis of a SCARA robot with planetary gearbox [C]// 2015 3rd RSI international conference on robotics and mechatronics (ICROM). IEEE, 2015: 640-644. |
| 24 | JIN X, LI S J, YANG X J, et al. Developments in research on seedling auto-picking device of vegetable transplanter [J]. Applied Mechanics and Materials, 2013, 364: 375-379. |
| 25 | YE B, YU G, CHEN Z, et al. Kinematics modeling and parameters optimization of seedling pick-up mechanism of planetary gear train with eccentric gear andnon-circular gear [J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(12): 7-12. |
| 26 | 赵雄, 陈建能, 杨茂祥, 等. 二阶自由非圆齿轮行星系钵苗移栽机取苗机构[J]. 农业机械学报, 2014, 45(4): 123-127. |
| ZHAO Xiong, CHEN Jianneng, YANG Maoxiang, et al. Seedling pick-up mechanism of planetary gear train withtwo-order general non-circular gears [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(4): 123-127. | |
| 27 | ZUO Y J, LI W G. Kinematic optimization of corn full-automatic transplanting mechanism with non-circular gears based on matlab [J]. Applied Mechanics and Materials, 2014, 635: 1408-1411. |
| 28 | 蒋兰, 吴崇友, 汤庆, 等. 油菜毯状苗移栽机栽植过程动力学模型及参数优化[J]. 农业工程学报, 2018, 34(21): 37-46. |
| JIANG Lan, WU Chongyou, TANG Qing, et al. Kinematics model and parameter optimization of planting process of rape carpet seedling transplanter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(21): 37-46. | |
| 29 | LUAN J M, CHI-LIANG C, JU J S. A feeding mechanism of vegetable seedling transplanter [J]. Chinese Elect. Period. Ser, 2006, 14(42): 35-42. |
| 30 | TESCH JR S M, BIERMAN B L. Seedling array transplanter: U.S. Patent 5,215,550 [P]. 1993. |
| 31 | 张诗, 田素博, 邱立春, 等. 穴盘苗自动移栽机械手的结构设计与仿真[J]. 沈阳农业大学学报, 2007(3): 437-439. |
| ZHANG Shi, TIAN Subo, QIU Lichun, et al. Structure Design and Simulation on Manipulator of Transplanting Potted Tray Seedlings [J]. Journal of Shenyang Agricultural University, 2007(3): 437-439. | |
| 32 | RYU K H, KIM G, HAN J S. AE—Automation and emerging technologies: development of a robotic transplanter for bedding plants [J]. Journal of Agricultural Engineering Research, 2001, 78(2): 141-146. |
| 33 | TIAN S B, QIU L C. Design on plug seedling automatic transplanter in greenhouse [J]. Advanced Materials Research, 2011, 317: 586-589. |
| 34 | 李建桥, 张国凤, 陈建能, 等. 钵苗有序移栽机构的研究进展及应用展望[J]. 农机化研究, 2008(2): 1-5. |
| LI Jianqiao, ZHANG Guofeng, CHEN Jianneng, et al. Developments and prospects of application of the ordered throwing mechanism for plotted rice-seedling [J]. Journal of Agricultural Mechanization Research, 2008(2): 1-5. | |
| 35 | 徐玉娟, 吴明亮, 向伟, 等. 油菜钵苗移栽机取送苗系统设计与验证[J]. 中国农学通报, 2016, 32(16): 185-192. |
| XU Yujian, WU Mingliang, XIANG Wei, et al. Design and Experiment of Picking up and Delivering Seedlings Systemfor Rape Plug Seedling Transplanter [J]. Chinese Agricultural Science Bulletin, 2016, 32(16): 185-192. | |
| 36 | YAMANOBE N, NAGATA K. Grasp planning for everyday objects based on primitive shape representation for parallel jaw grippers [C]// 2010 IEEE international conference on robotics and biomimetics. IEEE, 2010: 1565-1570. |
| 37 | RAHUL K, RAHEMAN H, PARADKAR V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter [J]. Computers and Electronics in Agriculture, 2019, 166: 105014. |
| 38 | HU J, YAN X, MA J, et al. Dimensional synthesis and kinematics simulation of a high-speed plug seedling transplanting robot [J]. Computers and Electronics in Agriculture, 2014, 107: 64-72. |
| 39 | IRWIN C T. Flexible fingers can solve gripper sensitivity problems [J]. Assembly automation, 1988, 8(2): 87-90. |
| 40 | HWANG H, SISTLER F E. A robotic pepper transplanter [J]. Applied Engineering in Agriculture, 1986, 2(1): 2-5. |
| 41 | KUTZ L J, MILES G E, HAMMER P A, et al. Robotic transplanting of bedding plants [J]. Transactions of the ASAE, 1987, 30(3): 586-590. |
| 42 | ISAACS G W. Robotic applications in agriculture [C]// International Symposium on Mechanization of Vegetable Production 187. 1985: 123-128. |
| 43 | MODEN W L, HAUSER V L. An automatically-fed bandoleer transplanter [J]. TRANSACTIONS of the ASAE, 1982, 25(4): 864-0867. |
| 44 | TING K C, GIACOMELLI G A, SHEN S J. Robot workcell for transplanting of seedlings part I-layout and materials flow [J]. Transactions of the ASAE, 1990, 33(3): 1005-1010. |
| 45 | TING K C, GIACOMELLI G A, SHEN S J, et al. Robot workcell for transplanting of seedlings part II-end-effector development [J]. Transactions of the ASAE, 1990, 33(3): 1013-1017. |
| 46 | LI Y H, MA Y, LIU S T, et al. Integrated design of a 4-DOF high-speed pick-and-place parallel robot [J]. CIRP Annals, 2014, 63(1): 185-188. |
| 47 | PANDILOV Z, DUKOVSKI V. Comparison of the characteristics between serial and parallel robots [J]. Acta Technica Corviniensis-Bulletin of Engineering, 2014, 7(1). |
| 48 | BOURBONNAIS F, BIGRAS P, BONEV I A. Minimum-time trajectory planning and control of a pick-and-place five-bar parallel robot [J]. IEEE/ASME Transactions on Mechatronics, 2014, 20(2): 740-749. |
| 49 | LI Y, HUANG T, CHETWYND D G. An approach for smooth trajectory planning of high-speed pick-and-place parallel robots using quintic B-splines [J]. Mechanism and Machine Theory, 2018, 126: 479-490. |
| 50 | TAI Y W, LING P P, TING K C. Machine vision assisted robotic seedling transplanting [J]. Transactions of the ASAE, 1994, 37(2): 661-667. |
| 51 | BEAM S M, MILES G E, TREECE G J, et al. Robotic transplanting: Simulation, design, performance tests [J]. Paper-American Society of Agricultural Engineers (USA), 1991. |
| 52 | SANDINI G, BUEMI F, MASSA M, et al. Visually guided operations in green-houses [C]// IEEE International Workshop on Intelligent Robots and Systems, Towards a New Frontier of Applications. IEEE, 1990: 279-285. |
| 53 | LING P P, RUZHITSKY V N. Machine vision techniques for measuring the canopy of tomato seedling [J]. Journal of Agricultural Engineering Research, 1996, 65(2): 85-95. |
| 54 | FENG Q, WANG X, JIANG K, et al. Design and test of key parts on automatictransplanter for flower seedling [J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(6): 21-27. |
| 55 | FENG Q, ZHAO C, JIANG K, et al. Design and test of tray-seedling sorting transplanter [J]. International Journal of Agricultural and Biological Engineering, 2015, 8(2): 14-20. |
| 56 | TONG J, JIANG H, ZHOU W. Development of automatic system for the seedling transplanter based on machine vision technology [C]//2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE). IEEE, 2012, 2: 742-746. |
| 57 | NAMBU T, TANIMURA M. Development of automatic transplanter using chain pot for vegetable crops [C]// International Symposium on Transplant Production Systems, 1992: 541-546. |
| 58 | SHAW L N. Changes needed to facilitate automatic field transplanting [J]. HortTechnology, 1993, 3(4): 418-420. |
| 59 | GRIFT T, ZHANG Q, KONDO N, et al. A review of automation and robotics for the bio-industry[J]. Journal of Biomechatronics Engineering, 2008, 1(1): 37-54. |
| 60 | BECHAR A, VIGNEAULT C. Agricultural robots for field operations: Concepts and components[J]. Biosystems Engineering, 2016, 149: 94-111. |
| [1] | Zhang Yongzheng, Cao Chengmao, Qin Kuan, Zhu Chengliang, Li Guangyao, Ge Jun, Fang Liangfei, Zhou Qiang. Design and experiment of automatic sweet potato transplanter with linear seedling supplying [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(2): 28-36. |
| [2] | Liufang Shentu, Han Liu, Xuan Wu, Xingzhao Sun, Wenyi Zhang. Design and analysis of cam mechanism of sweet potato transplanter based on Creo* [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2020, 1(2): 11-18. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||