ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2024, Vol. 5 ›› Issue (2): 19-32.DOI: 10.12398/j.issn.2096-7217.2024.02.003
Previous Articles Next Articles
HU Chenwei( ), CHEN Yu(), CAO Jiayu, CHEN Yuxiang, ZHANG Shuo, CHEN Jun
), CHEN Yu(), CAO Jiayu, CHEN Yuxiang, ZHANG Shuo, CHEN Jun
Received:2023-10-22
Revised:2024-01-04
Online:2024-05-15
Published:2024-05-15
Corresponding author:
CHEN Yu
CLC Number:
HU Chenwei, CHEN Yu, CAO Jiayu, CHEN Yuxiang, ZHANG Shuo, CHEN Jun. Research on constant speed cruise control of 4WID high ground clearance self-propelled electric sprayer[J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(2): 19-32.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2024.02.003

Figure 1 Force diagram of the sprayer in spatial coordinate system

Figure 2 Longitudinal dynamics simulation system of the sprayer
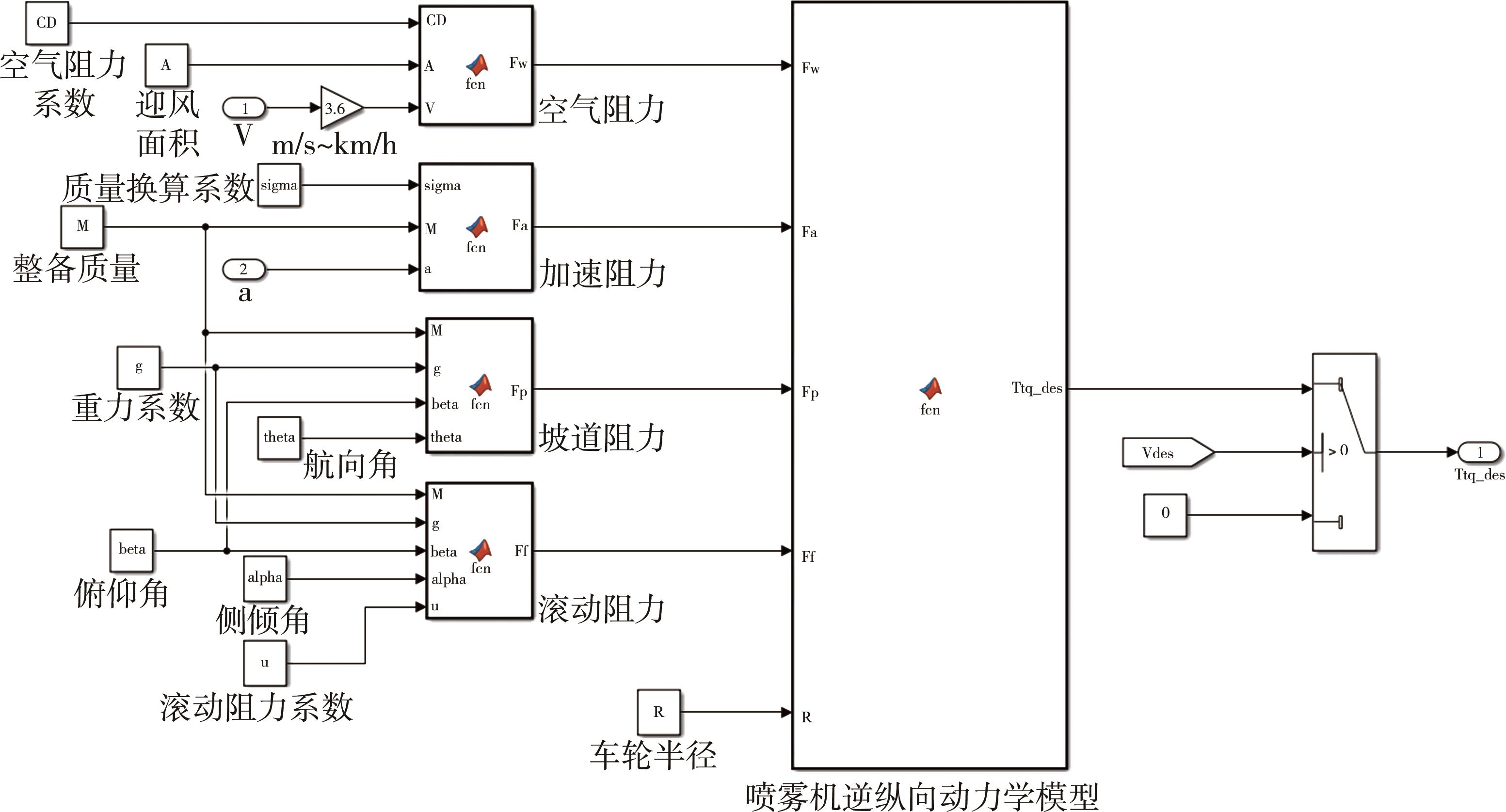
Figure 3 Inverse longitudinal dynamics module
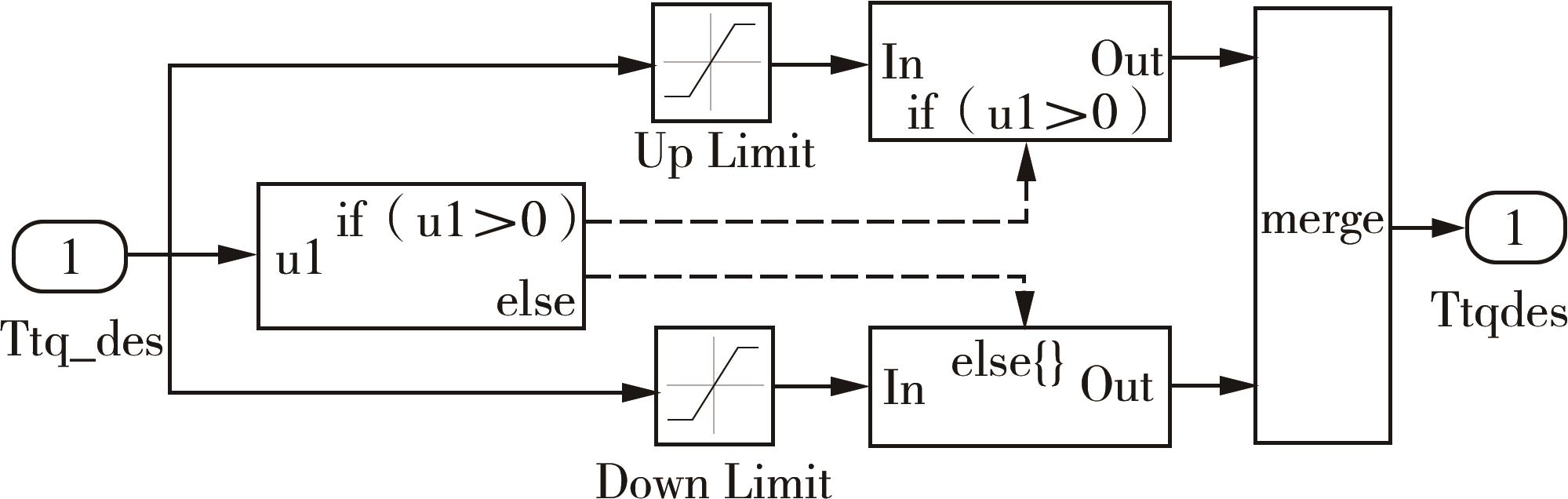
Figure 4 Drive and brake switching relationship module
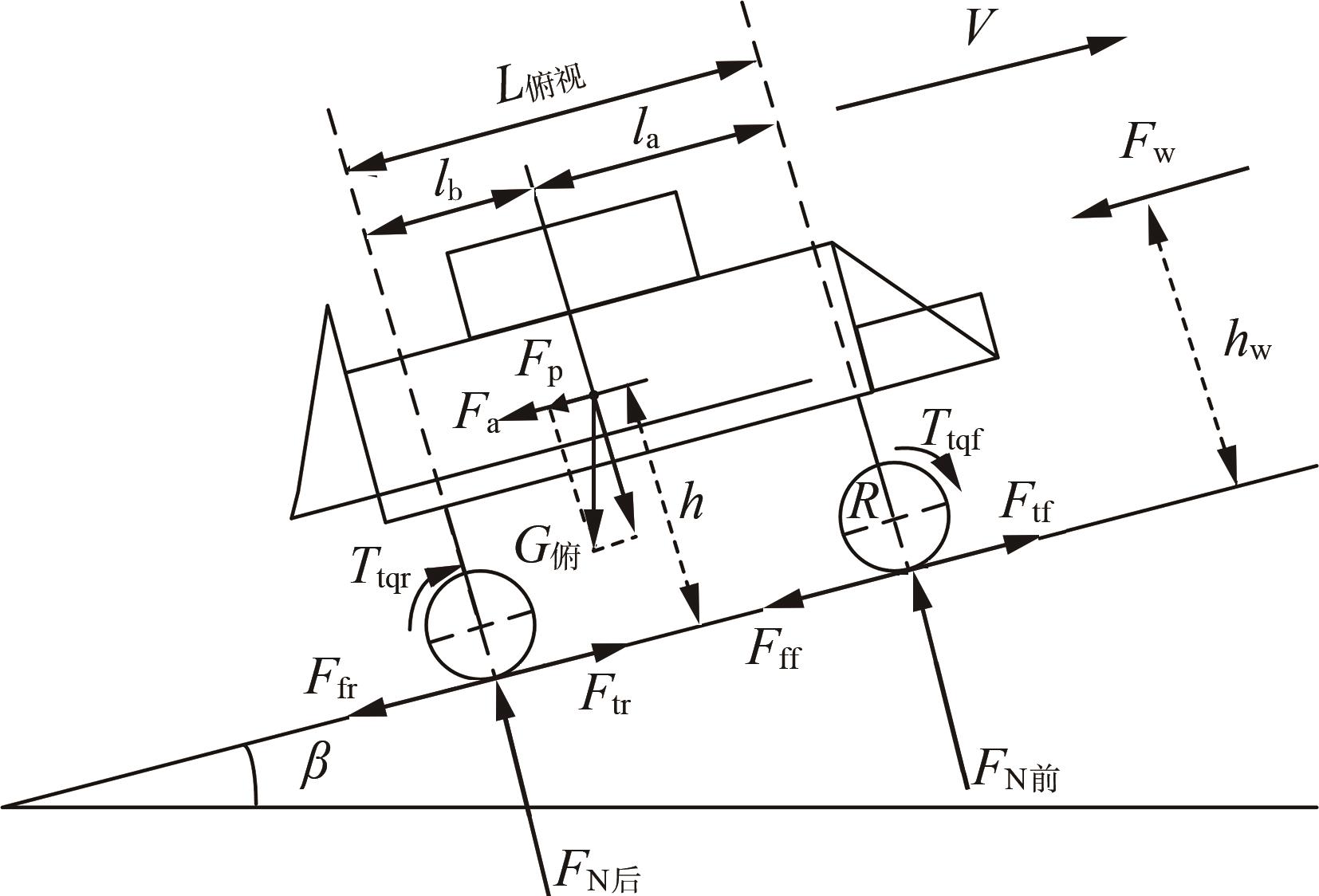
Figure 5 Two-wheel model of the sprayer from a pitch angle view
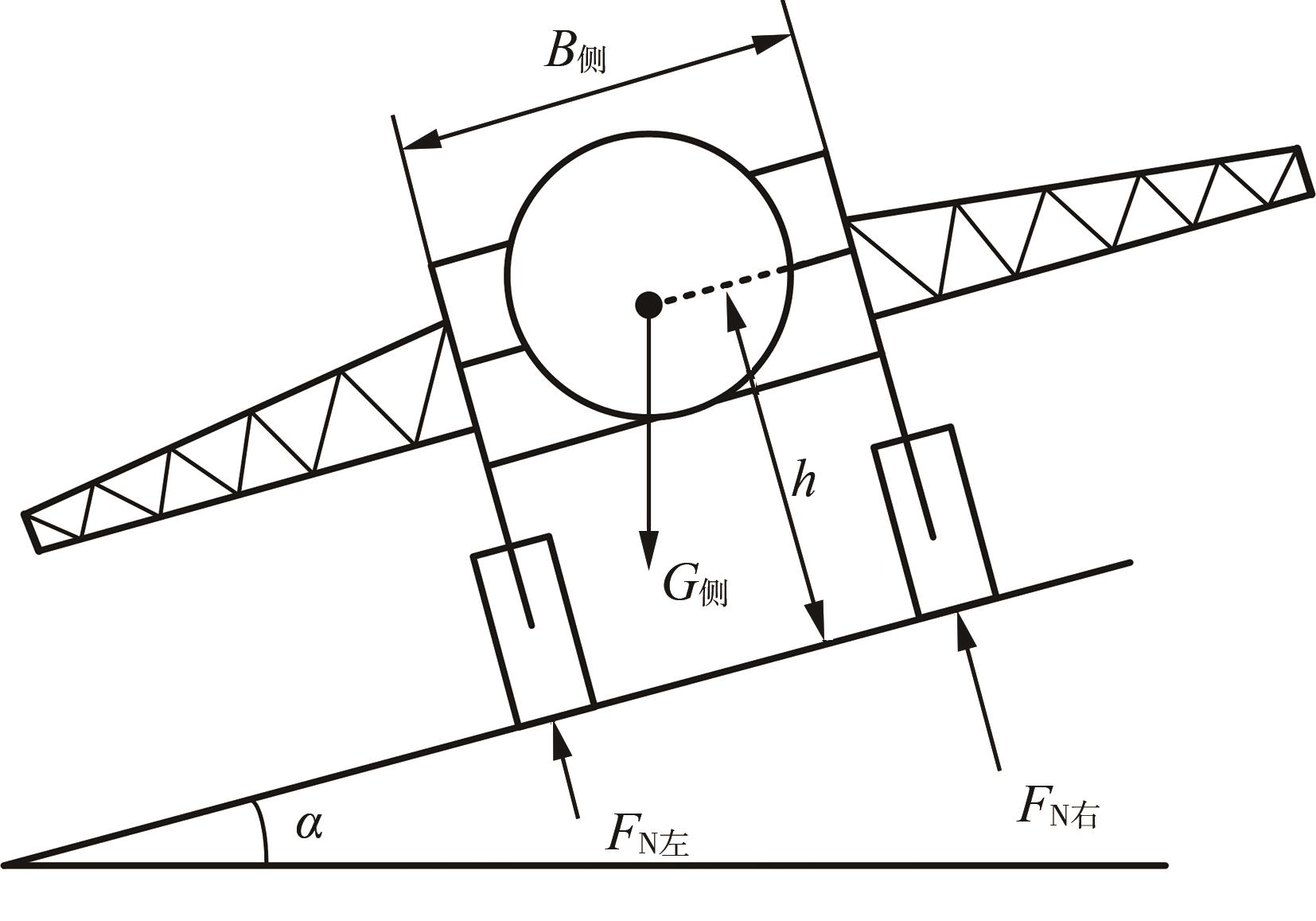
Figure 6 Two-wheel model of the sprayer from a roll angle view
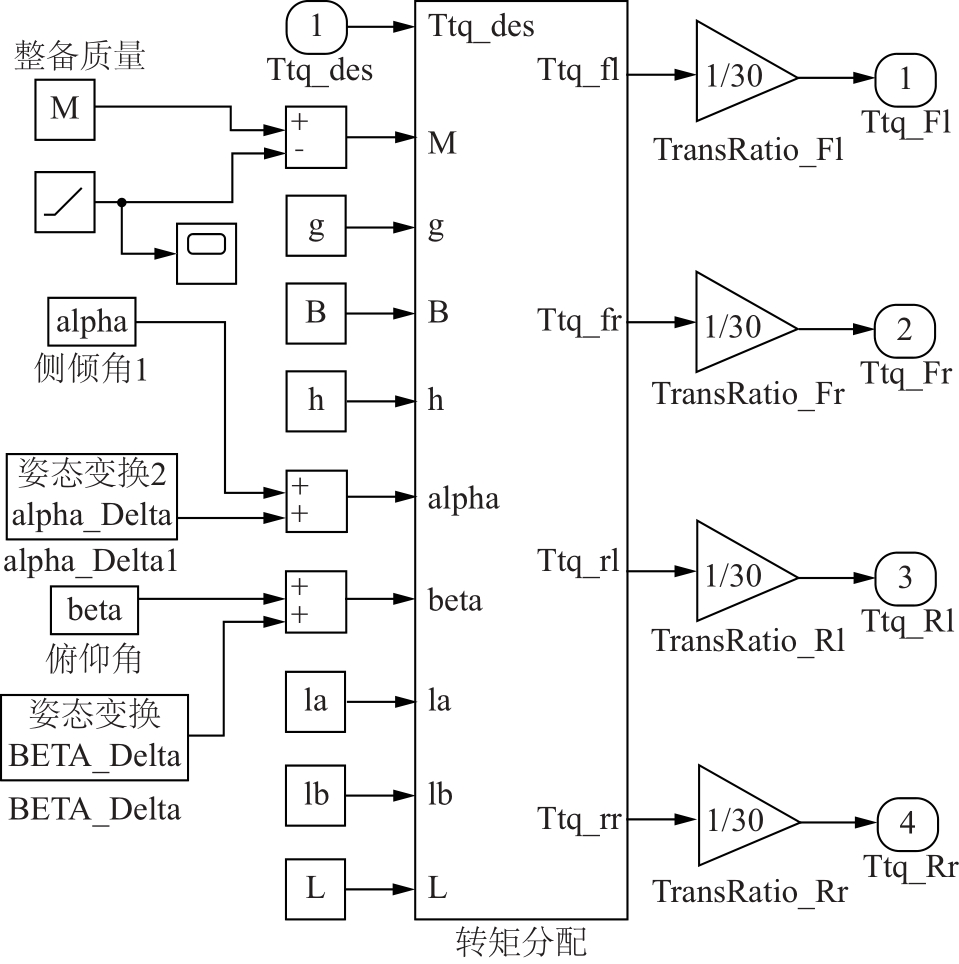
Figure 7 Four-wheel torque distribution strategy
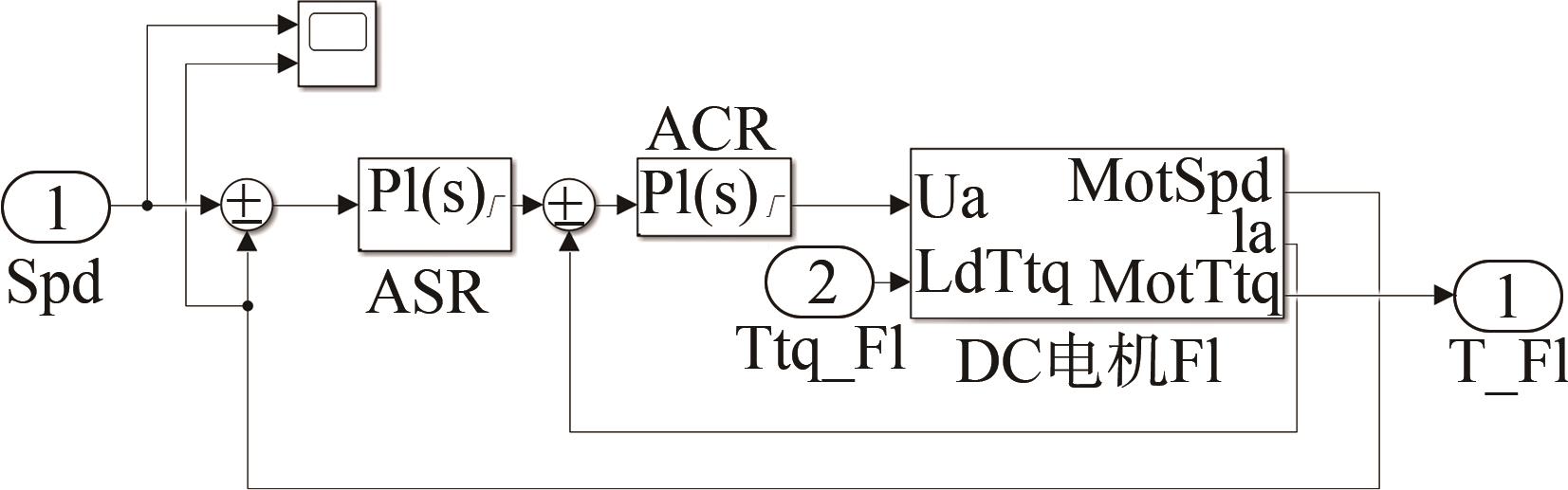
Figure 8 Wheel hub motor control model
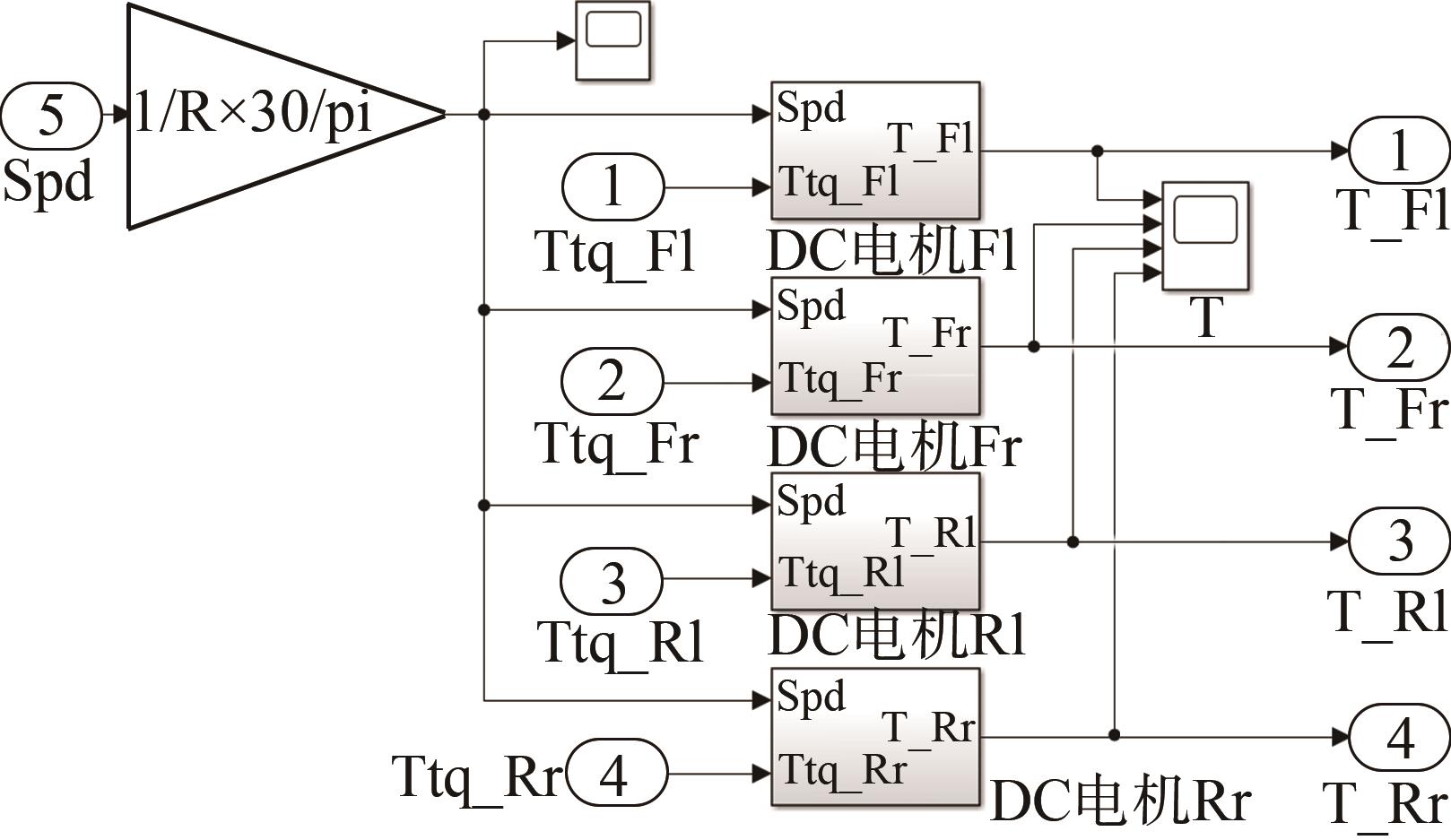
Figure 9 Overall motor module
| 参数 | 转速调节器ASR | 电流调节器ACR |
|---|---|---|
| 比例调节系数kp | 2.5 | 3.8 |
| 积分调节系数ki | 0.01 | 0.007 |
Table 1 Motor control model regulator parameters
| 参数 | 转速调节器ASR | 电流调节器ACR |
|---|---|---|
| 比例调节系数kp | 2.5 | 3.8 |
| 积分调节系数ki | 0.01 | 0.007 |
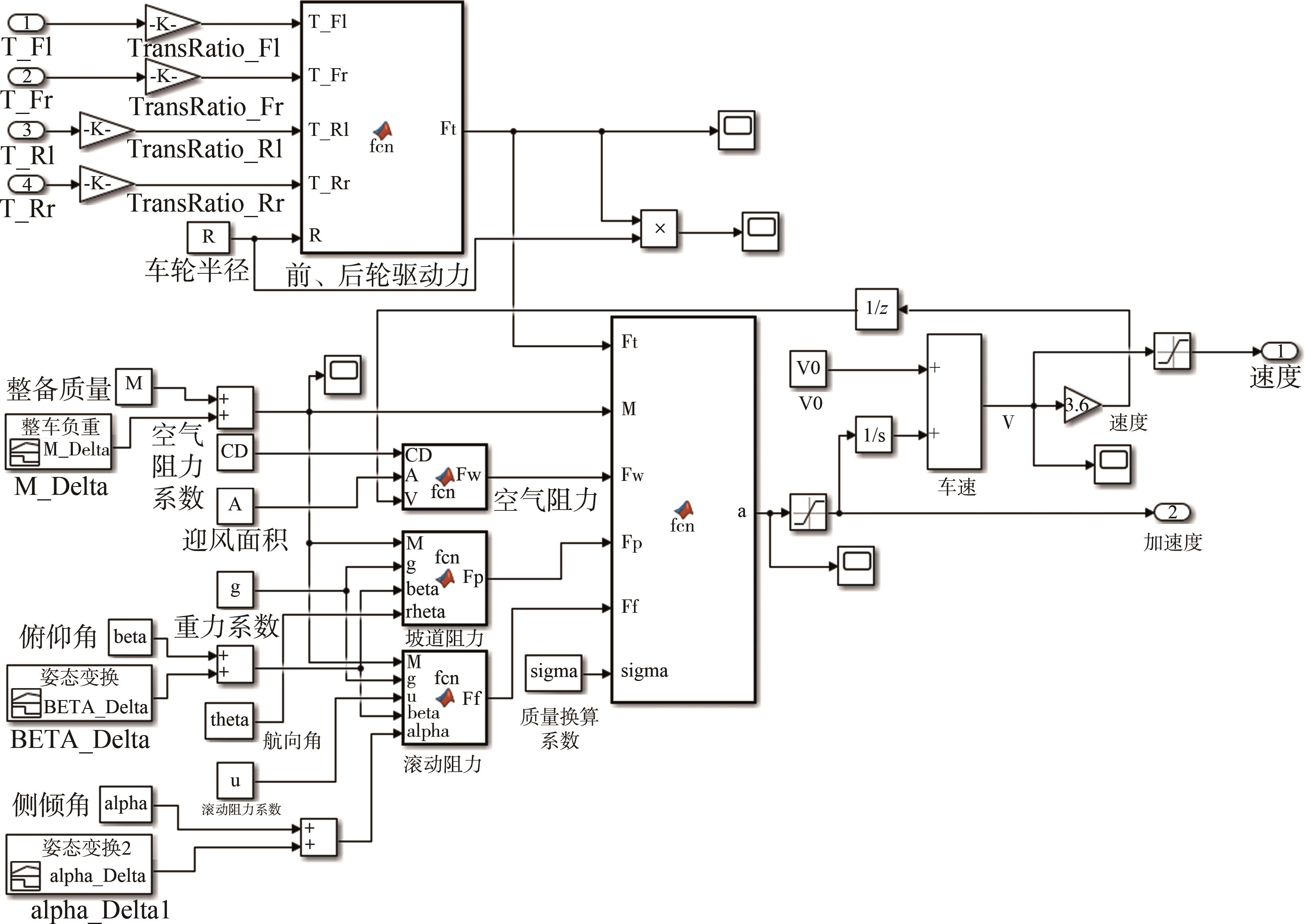
Figure 10 Longitudinal dynamics model of the sprayer

Figure 11 Simulation block diagram of the longitudinal dynamics system for the sprayer's cruise control

Figure 12 Standard cruise control structure
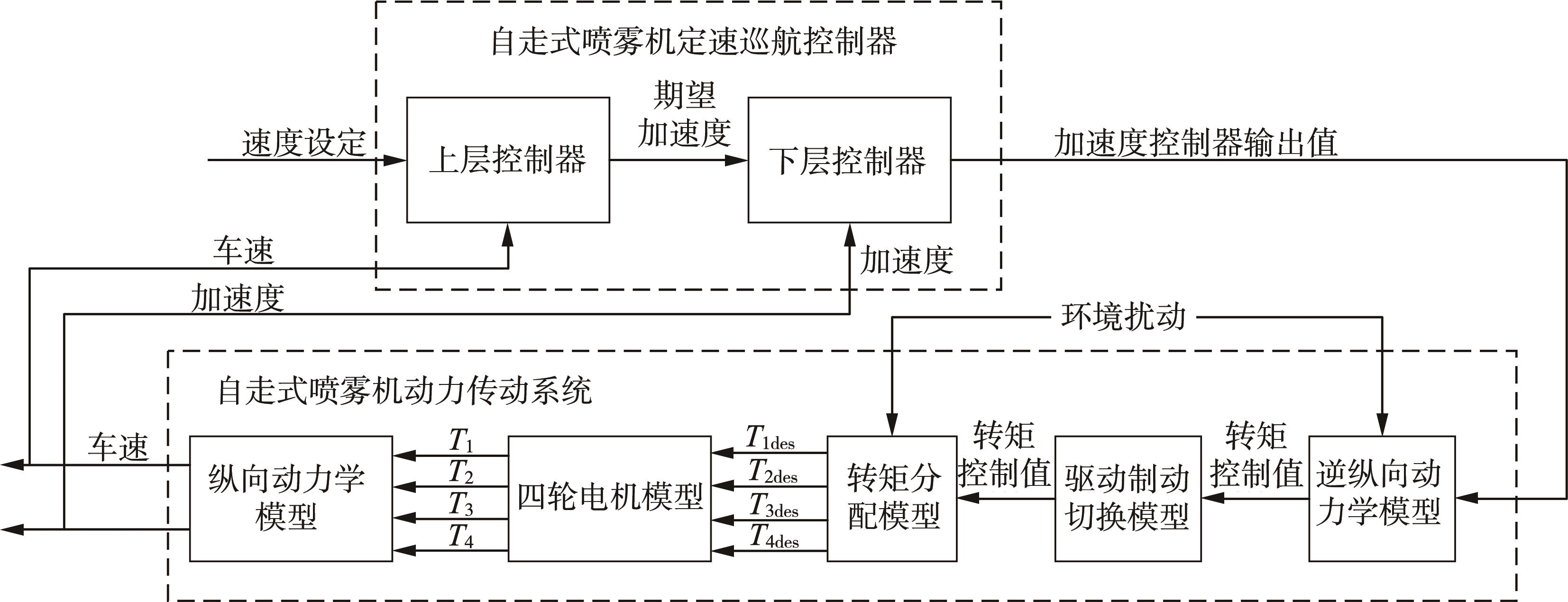
Figure 13 Overall scheme of the cruise control system for the sprayer
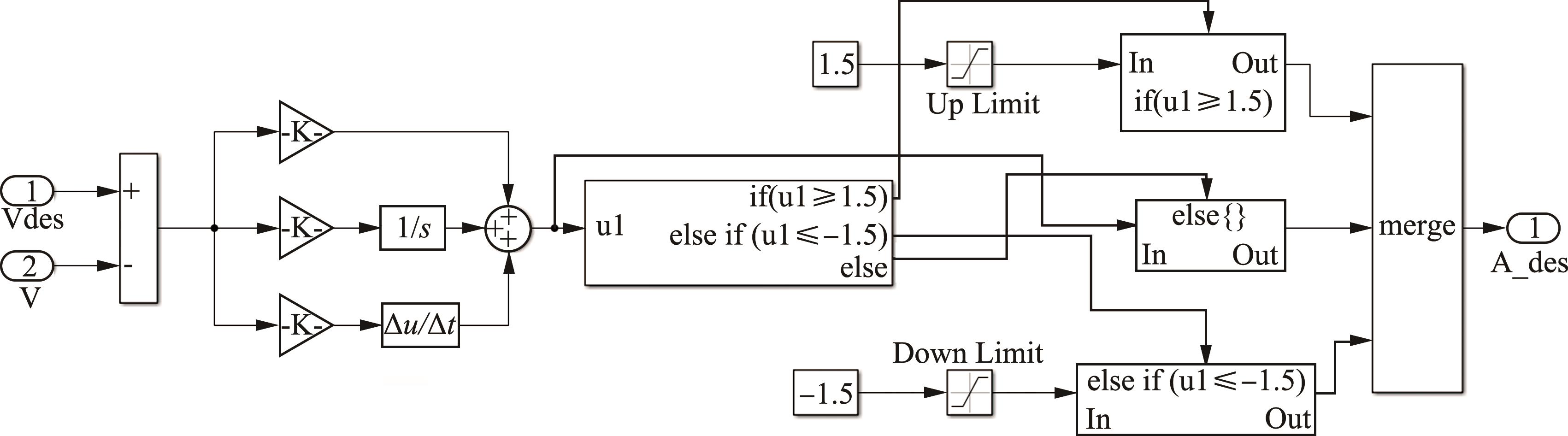
Figure 14 Upper-level controller model
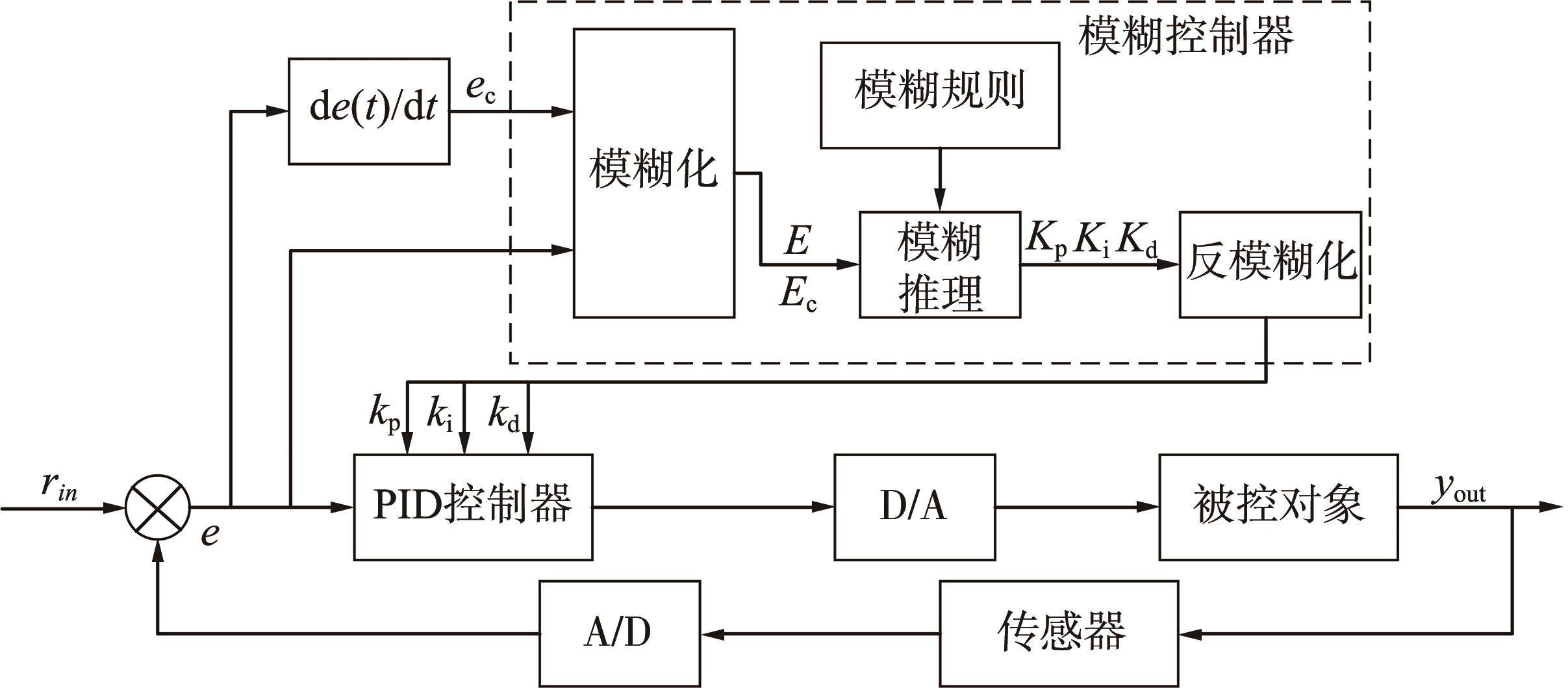
Figure 15 Fuzzy PID control structure

Figure 16 Membership functions of input and output variables for fuzzy PID control of cruise control
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB/NB/PS | PB/NB/NS | PM/NM/NB | PM/NM/NB | PS/NS/NB | ZO/ZO/NM | ZO/ZO/PS |
| NM | PB/NB/PS | PB/NB/NS | PM/NM/NB | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/ZO/ZO |
| NS | PM/NB/ZO | PM/NM/NS | PM/NS/NM | PS/NS/NM | ZO/ZO/NM | NS/PS/NS | NS/PS/ZO |
| ZO | PM/NM/ZO | PM/NM/NS | PS/NS/NS | ZO/ZO/NS | NS/PS/NS | NM/PM/NS | NM/PM/ZO |
| PS | PS/NM/ZO | PS/NS/ZO | ZO/ZO/ZO | NS/PS/ZO | NS/PS/ZO | NM/PM/ZO | NM/PB/ZO |
| PM | PS/ZO/PB | ZO/ZO/NS | NS/PS/NS | NM/PS/PS | NM/PM/PS | NM/PB/PS | NB/PB/PB |
| PB | ZO/ZO/PB | ZO/ZO/PM | NM/PS/PM | NM/PM/PM | NM/PM/PS | NB/PB/PS | NB/PB/PB |
Table 2 Adjustment table for control rules of parameters Kp, Ki, and Kd
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB/NB/PS | PB/NB/NS | PM/NM/NB | PM/NM/NB | PS/NS/NB | ZO/ZO/NM | ZO/ZO/PS |
| NM | PB/NB/PS | PB/NB/NS | PM/NM/NB | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/ZO/ZO |
| NS | PM/NB/ZO | PM/NM/NS | PM/NS/NM | PS/NS/NM | ZO/ZO/NM | NS/PS/NS | NS/PS/ZO |
| ZO | PM/NM/ZO | PM/NM/NS | PS/NS/NS | ZO/ZO/NS | NS/PS/NS | NM/PM/NS | NM/PM/ZO |
| PS | PS/NM/ZO | PS/NS/ZO | ZO/ZO/ZO | NS/PS/ZO | NS/PS/ZO | NM/PM/ZO | NM/PB/ZO |
| PM | PS/ZO/PB | ZO/ZO/NS | NS/PS/NS | NM/PS/PS | NM/PM/PS | NM/PB/PS | NB/PB/PB |
| PB | ZO/ZO/PB | ZO/ZO/PM | NM/PS/PM | NM/PM/PM | NM/PM/PS | NB/PB/PS | NB/PB/PB |
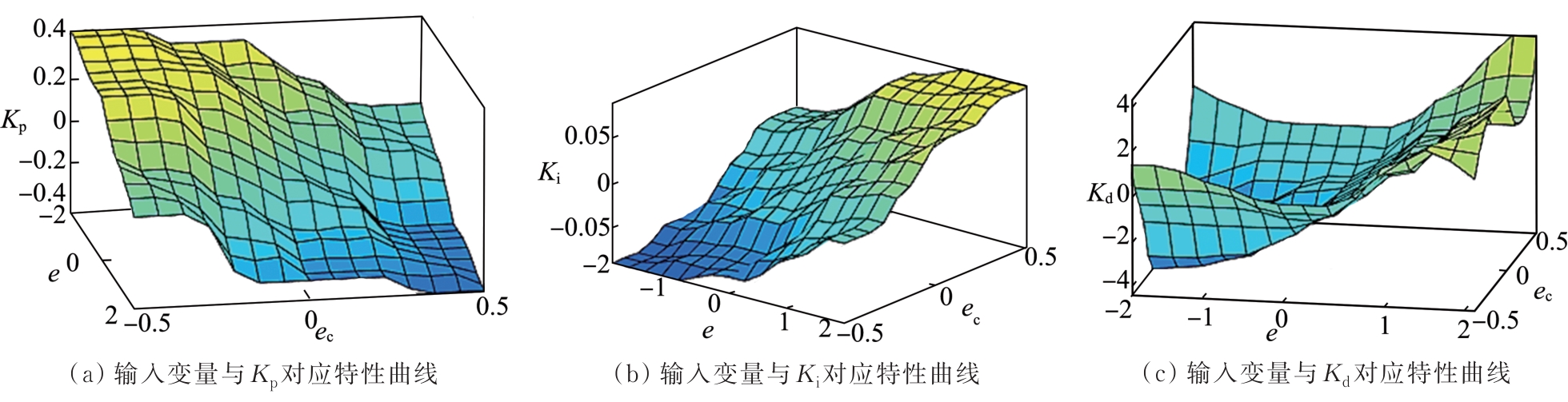
Figure 17 Corresponding characteristic curves of input and output variables
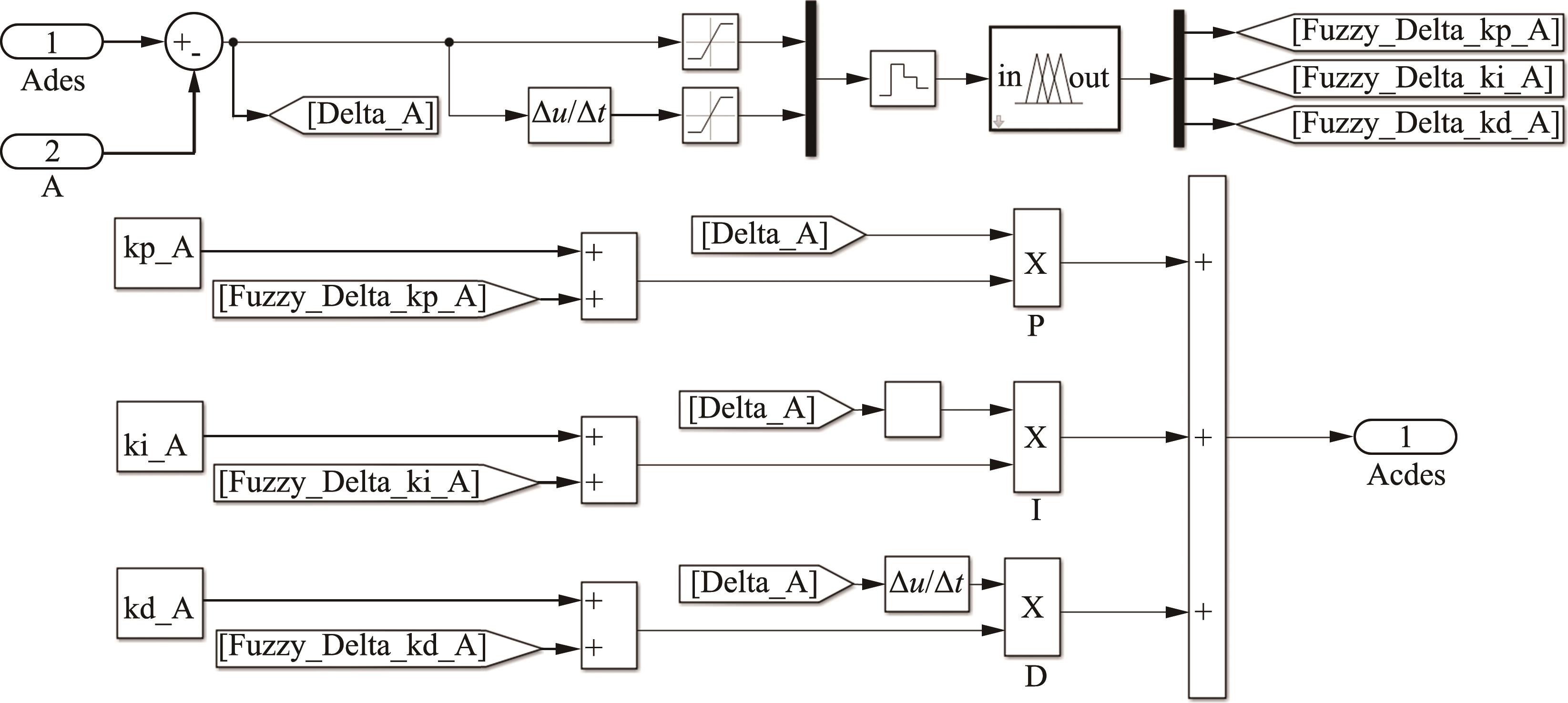
Figure 18 Simulation of the fuzzy PID control system for constant speed cruising of a sprayer

Figure 19 Torque distribution of individual wheel hub motors under different operating conditions
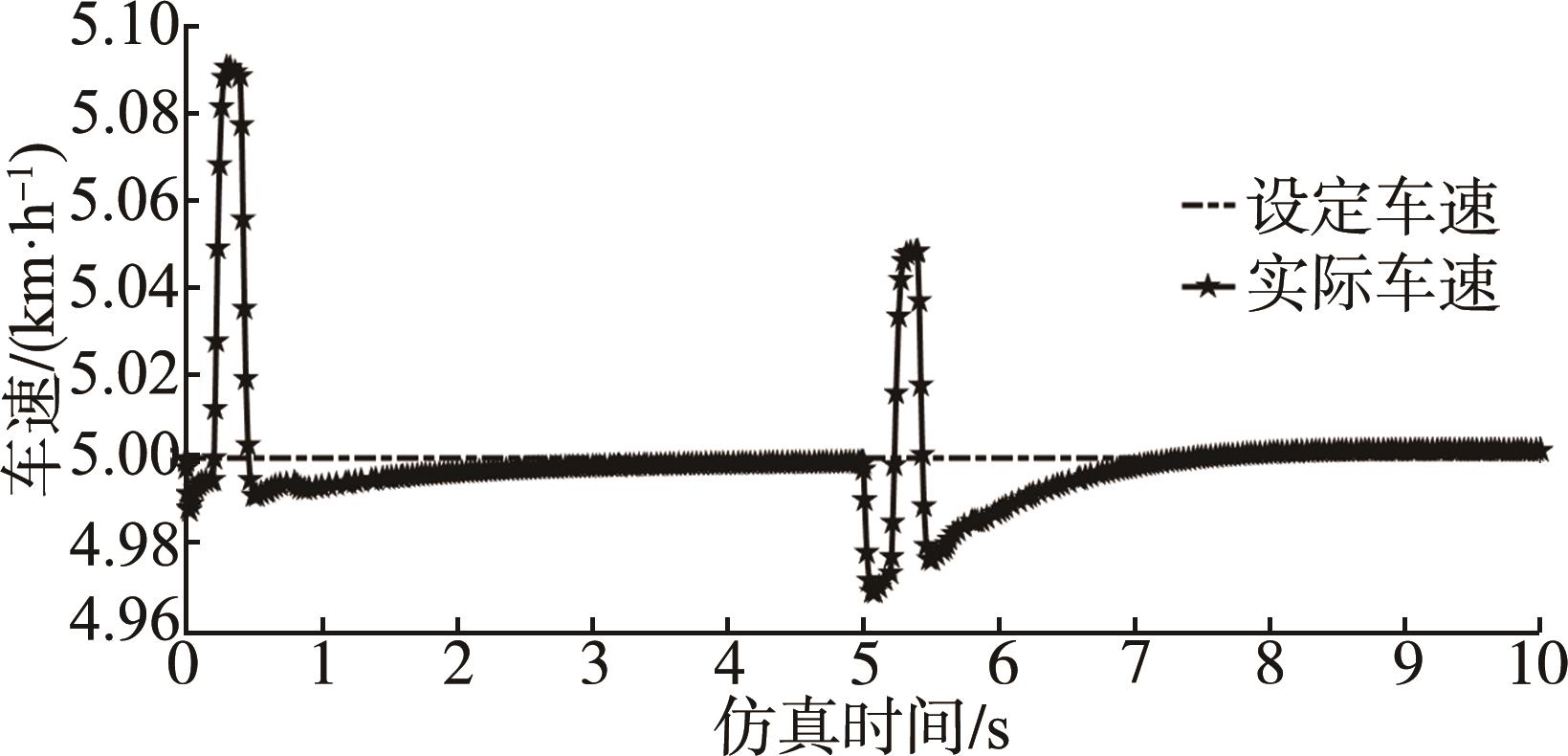
Figure 20 Speed tracking curve
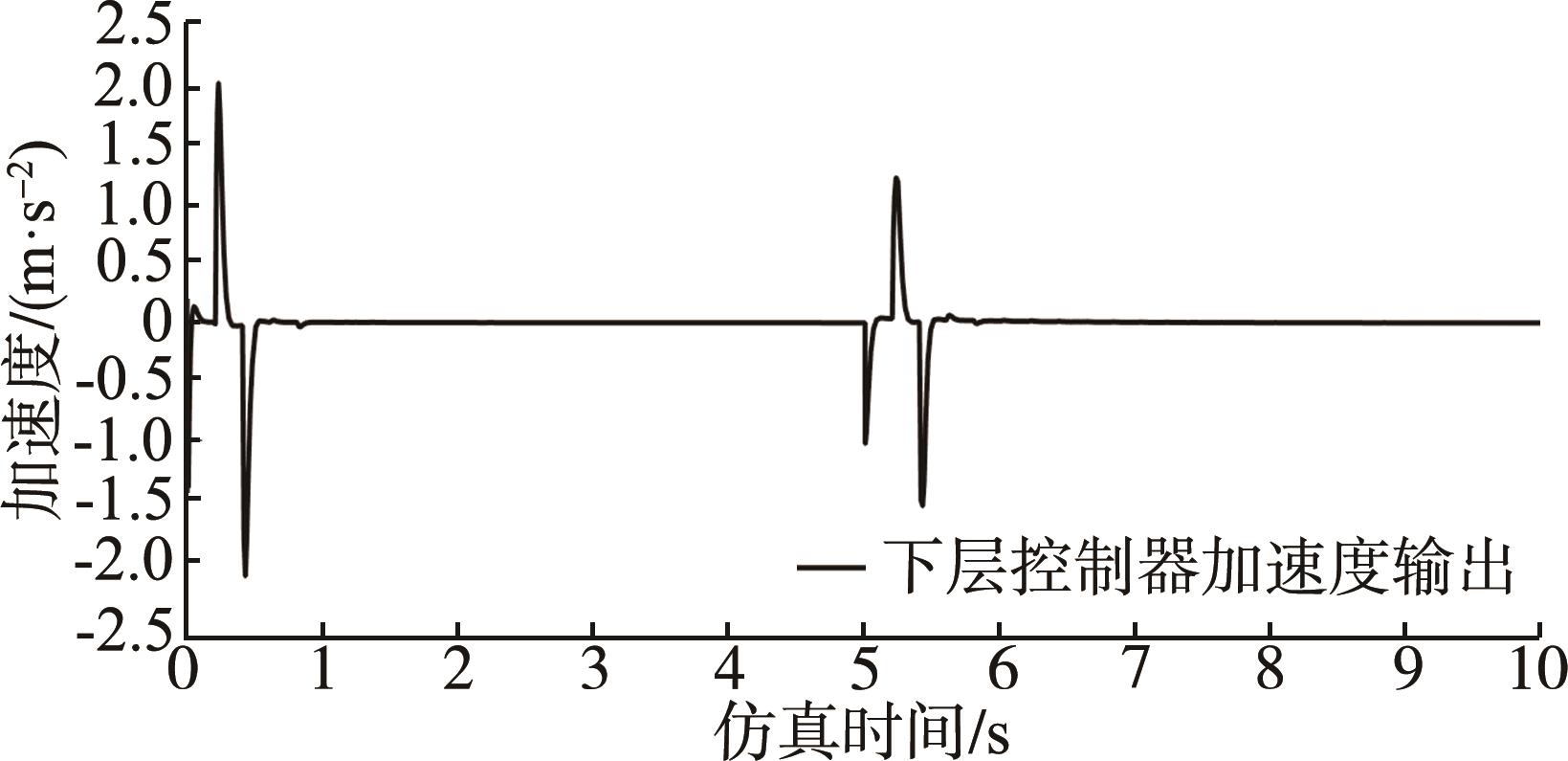
Figure 21 Acceleration output curve
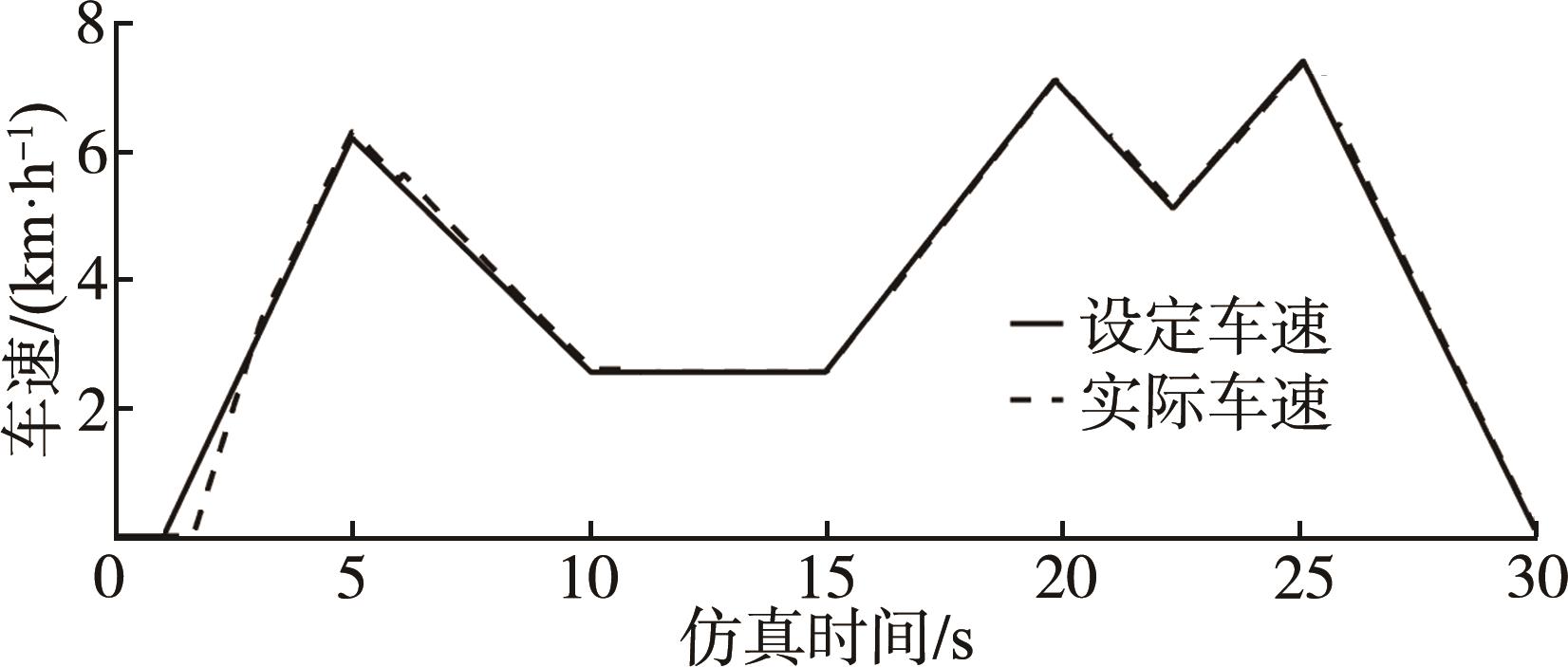
Figure 22 Speed tracking curve
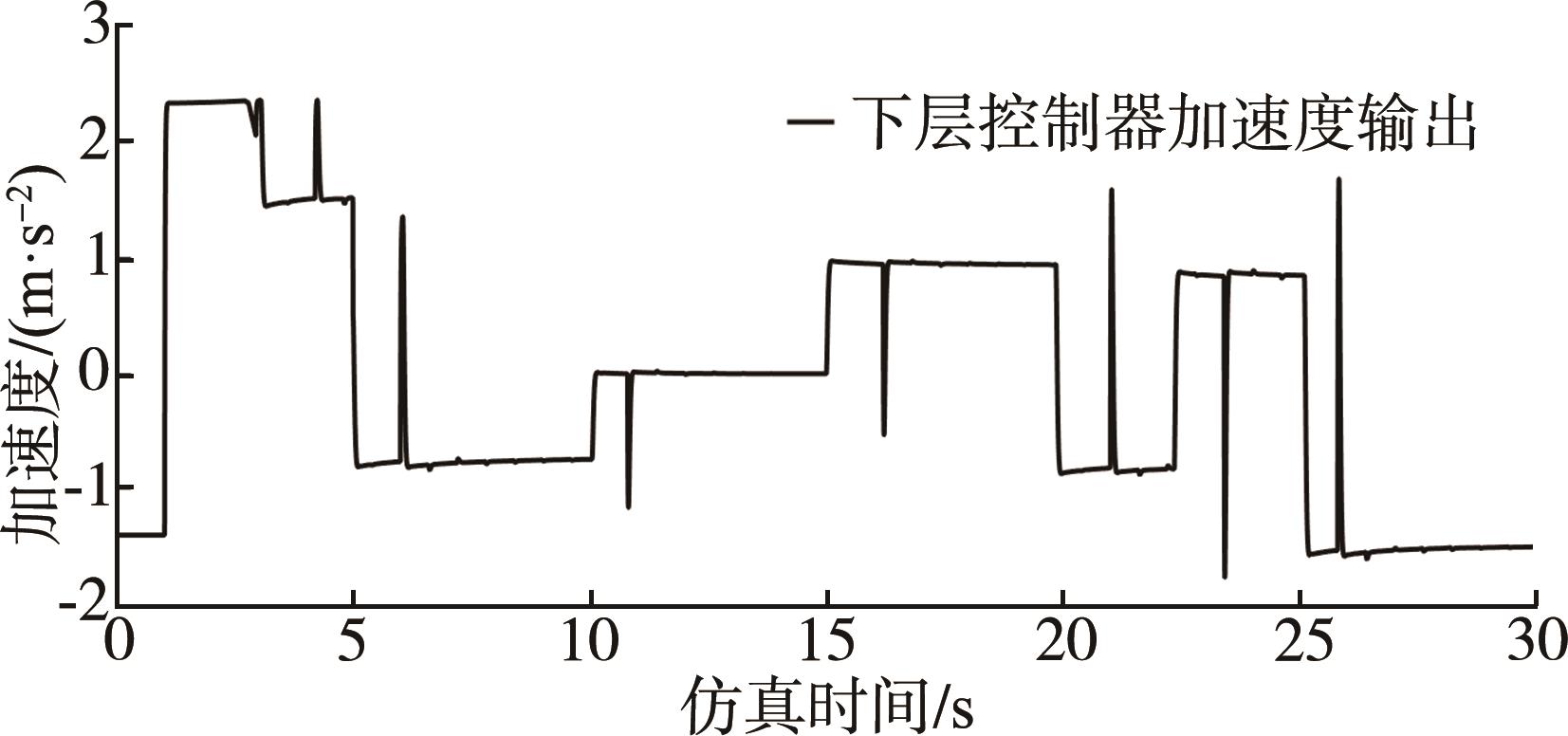
Figure 23 Acceleration output curve
| 1 | 韩科立, 朱忠祥, 毛恩荣, 等. 基于最优控制的导航拖拉机速度与航向联合控制方法[J]. 农业机械学报, 2013, 44(2): 165-170. |
| HAN Keli, ZHU Zhongxiang, MAO Enrong, et al. Joint control method of speed and heading of navigation tractor based on optimal control [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 165-170. | |
| 2 | 景亮, 张亚飞, 沈跃, 等. 四轮独立驱动高地隙无人喷雾机轨迹跟踪自适应控制[J]. 农业机械学报, 2021, 52(12): 408-416. |
| JING Liang, ZHANG Yafei, SHEN Yue, et al. Adaptive trajectory tracking control of 4WID high clearance unmanned sprayer [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(12): 408-416. | |
| 3 | 王卓, 刘知祥, 白晓平, 等. 拖拉机定速巡航系统纵向加速度跟踪控制[J]. 农业机械学报, 2018, 49(1): 21-28. |
| WANG Zhuo, LIU Zhixiang, BAI Xiaoping, et al. Longitudinal acceleration tracking control of tractor cruise system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 21-28. | |
| 4 | 赵春江, 魏传省, 付卫强, 等. 静液压传动拖拉机定速巡航控制系统设计与试验[J]. 农业机械学报, 2021, 52(4): 359-365. |
| ZHAO Chunjiang, WEI Chuansheng, FU Weiqiang, et al. Design and experiment of cruise control system for hydrostatic transmission tractor [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(4): 359-365. | |
| 5 | 解来卿, 罗禹贡, 李升波, 等. 分布式电驱动车辆的ACC协同控制[J]. 汽车工程, 2018, 40(6): 652-658, 665. |
| XIE Laiqing, LUO Yugong, LI Shengbo, et al. Coordinated control for adaptive cruise control system of distributed drive electric vehicles [J]. Automotive Engineering, 2018, 40(6): 652-658, 665. | |
| 6 | 张国苗, 王艳华, 王富富, 等. 基于DDEV自适应巡航行驶稳定性研究[J]. 机械制造与自动化, 2023, 52(5): 190-193, 221. |
| ZHANG Guomiao, WANG Yanhua, WANG Fufu, et al. Research on stability of adaptive cruise based on DDEV [J]. Machine Building & Automation, 2023, 52(5): 190-193, 221. | |
| 7 | 杨澜, 赵祥模, 吴国垣, 等. 智能网联汽车协同生态驾驶策略综述[J]. 交通运输工程学报, 2020, 20(5): 58-72. |
| YANG Lan, ZHAO Xiangmo, WU Guoyuan, et al. Review on connected and automated vehicles based cooperative eco-driving strategies [J]. Journal of Traffic and Transportation Engineering, 2020, 20(5): 58-72. | |
| 8 | 张丽萍, 刘猛, 刘志刚, 等. 车辆自适应巡航分层控制系统的联合仿真研究[J]. 机械设计与制造, 2022(5): 69-72, 77. |
| ZHANG Liping, LIU Meng, LIU Zhigang, et al. Joint simulation of vehicle adaptive cruise hierarchical control system [J]. Machinery Design & Manufacture, 2022(5): 69-72, 77. | |
| 9 | 董胜, 袁朝辉, 谷超, 等. 基于多学科技术融合的智能农机控制平台研究综述[J]. 农业工程学报, 2017, 33(8): 1-11. |
| DONG Sheng, YUAN Zhaohui, GU Chao, et al. Research on intelligent agricultural machinery control platform based on multi-discipline technology integration [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(8): 1-11. | |
| 10 | 韩树丰, 何勇, 方慧. 农机自动导航及无人驾驶车辆的发展综述[J]. 浙江大学学报(农业与生命科学版), 2018, 44(4): 381-391, 515. |
| HAN Shufeng, HE Yong, FANG Hui. Recent development in automatic guidance and autonomous vehicle for agriculture: A review [J]. Journal of Zhejiang University (Agric. & Life Sci.), 2018, 44(4): 381-391, 515. | |
| 11 | COEN T, SAEYS W, MISSOTTEN B, et al. Cruise control on a combine harvester using model-based predictive control [J]. Biosystems Engineering, 2008, 99(1): 47-55. |
| 12 | KAYACAN E, KAYACAN E, RAMON H, et al. Towards agrobots: Trajectory control of an autonomous tractor using type-2 fuzzy logic controllers [J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(1): 287-298. |
| 13 | 苗中华, 李闯, 韩科立, 等. 基于模糊PID的采棉机作业速度最优控制算法与试验[J]. 农业机械学报, 2015, 46(4): 9-14, 27. |
| MIAO Zhonghua, LI Chuang, HAN Keli, et al. Optimal control algorithm and experiment of working speed of cotton-picking machine based on fuzzy PID [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(4): 9-14, 27. | |
| 14 | 何杰, 朱金光, 张智刚, 等. 水稻插秧机自动作业系统设计与试验[J]. 农业机械学报, 2019, 50(3): 17-24. |
| HE Jie, ZHU Jinguang, ZHANG Zhigang, et al. Design and experiment of automatic operation system for rice transplanter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(3): 17-24. | |
| 15 | 韩晓峰. 直流电机PWM-H桥双闭环可逆调速仿真研究[J]. 电子设计工程, 2020, 28(8): 154-159. |
| HAN Xiaofeng. Simulation research on double-closed reversible speed regulation of DC motor PWM-MH bridge [J]. Electronic Design Engineering, 2020, 28(8): 154-159. | |
| 16 | 陈智, 王贵锋. 模糊PID算法的双闭环直流电机调速系统[J]. 电子科技, 2017, 30(7): 33-36. |
| CHEN Zhi, WANG Guifeng. Fuzzy PID algorithm of double closed loop DC motor speed regulation system [J]. Electronic Science and Technology, 2017, 30(7): 33-36. | |
| 17 | 吕安涛, 毛恩荣, 宋正河, 等. 一种拖拉机自动驾驶复合模糊控制方法[J]. 农业机械学报, 2006(4): 17-20. |
| Antao LÜ, MAO Enrong, SONG Zhenghe, et al. A complex fuzzy control technique of tractor automatic steering [J]. Transactions of the Chinese Society for Agricultural Machinery, 2006(4): 17-20. | |
| 18 | KAIZU Y, YOKOYAMA S, IMOU K, et al. Vision-based navigation of a rice transplanter [C]//International Commission of Agricultural Engineering(CIGR) International Conference. 2004: 144-147. |
| 19 | 周俊, 姬长英. 视觉导航轮式移动机器人横向预测模糊控制[J]. 农业机械学报, 2002(6): 76-79. |
| ZHOU Jun, JI Changying. Lateral predictive fuzzy logic control for wheeled mobile robot navigated by machine vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2002(6): 76-79. | |
| 20 | Noguchi N, Will J, Reid J, et al. Development of a master-slave robot system for farm operations [J]. Computer and Electronics in Agriculture, 2004, 44(1): 1-19. |
| 21 | 周佳扬. 基于模糊PID方法的车辆自适应巡航控制系统研究[D]. 西安: 长安大学, 2020. |
| ZHOU Jiayang. Study on fuzzy PID method for adaptive cruise control system of vehicles [D]. Xi'an: Chang'an University, 2020. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||