ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2023, Vol. 4 ›› Issue (3): 61-70.DOI: 10.12398/j.issn.2096-7217.2023.03.007
BAI Zhenwei( ), YAN Fuwei, YUAN Peihai, ZHANG Haoming, YANG Runshu
), YAN Fuwei, YUAN Peihai, ZHANG Haoming, YANG Runshu
Received:2023-03-15
Revised:2023-07-19
Online:2023-08-15
Published:2023-08-15
CLC Number:
BAI Zhenwei, YAN Fuwei, YUAN Peihai, ZHANG Haoming, YANG Runshu. Design and experiment of fruit sorting robot based on embedded machine vision[J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 61-70.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2023.03.007
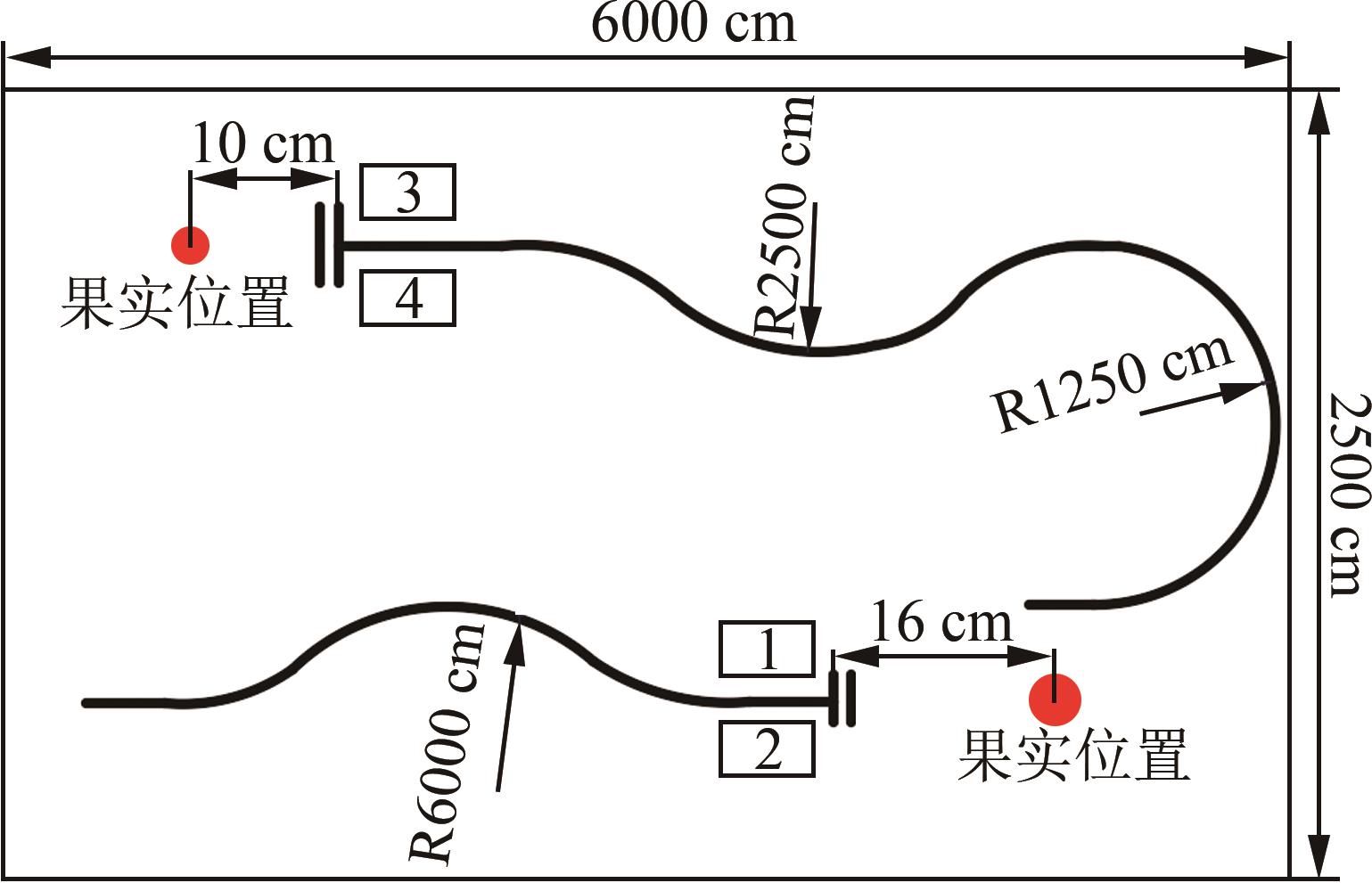
Figure 1 Model diagram of experimental site
| 性能指标 | 性能参数 |
|---|---|
硬度/HD (ASTM Method D2240) | 76~86 |
拉伸模量/MPa (ASTM Method D638M) | 2 559~2 678 |
拉伸强度/MPa (ASTM Method D638M) | 38~56 |
断裂延展率/% (ASTM Method D638M) | 8~14 |
弯曲强度/MPa (ASTM Method D790M) | 69~73 |
弯曲模量/MPa (ASTM Method D790M) | 2 670~2 758 |
Table 1 Material performance parameters
| 性能指标 | 性能参数 |
|---|---|
硬度/HD (ASTM Method D2240) | 76~86 |
拉伸模量/MPa (ASTM Method D638M) | 2 559~2 678 |
拉伸强度/MPa (ASTM Method D638M) | 38~56 |
断裂延展率/% (ASTM Method D638M) | 8~14 |
弯曲强度/MPa (ASTM Method D790M) | 69~73 |
弯曲模量/MPa (ASTM Method D790M) | 2 670~2 758 |
| 机械结构 | 机械参数 |
|---|---|
| 最大车长/mm | 295 |
| 最大车宽/mm | 219 |
| 主控板架高度/mm | 30 |
| 最大主力臂长/mm | 145 |
| 最大前臂长/mm | 172 |
| 最大前伸距离/mm | 208 |
| 爪间最大距离/mm | 58 |
Table 2 Structure parameter
| 机械结构 | 机械参数 |
|---|---|
| 最大车长/mm | 295 |
| 最大车宽/mm | 219 |
| 主控板架高度/mm | 30 |
| 最大主力臂长/mm | 145 |
| 最大前臂长/mm | 172 |
| 最大前伸距离/mm | 208 |
| 爪间最大距离/mm | 58 |

Figure 2 Structural parameter diagram
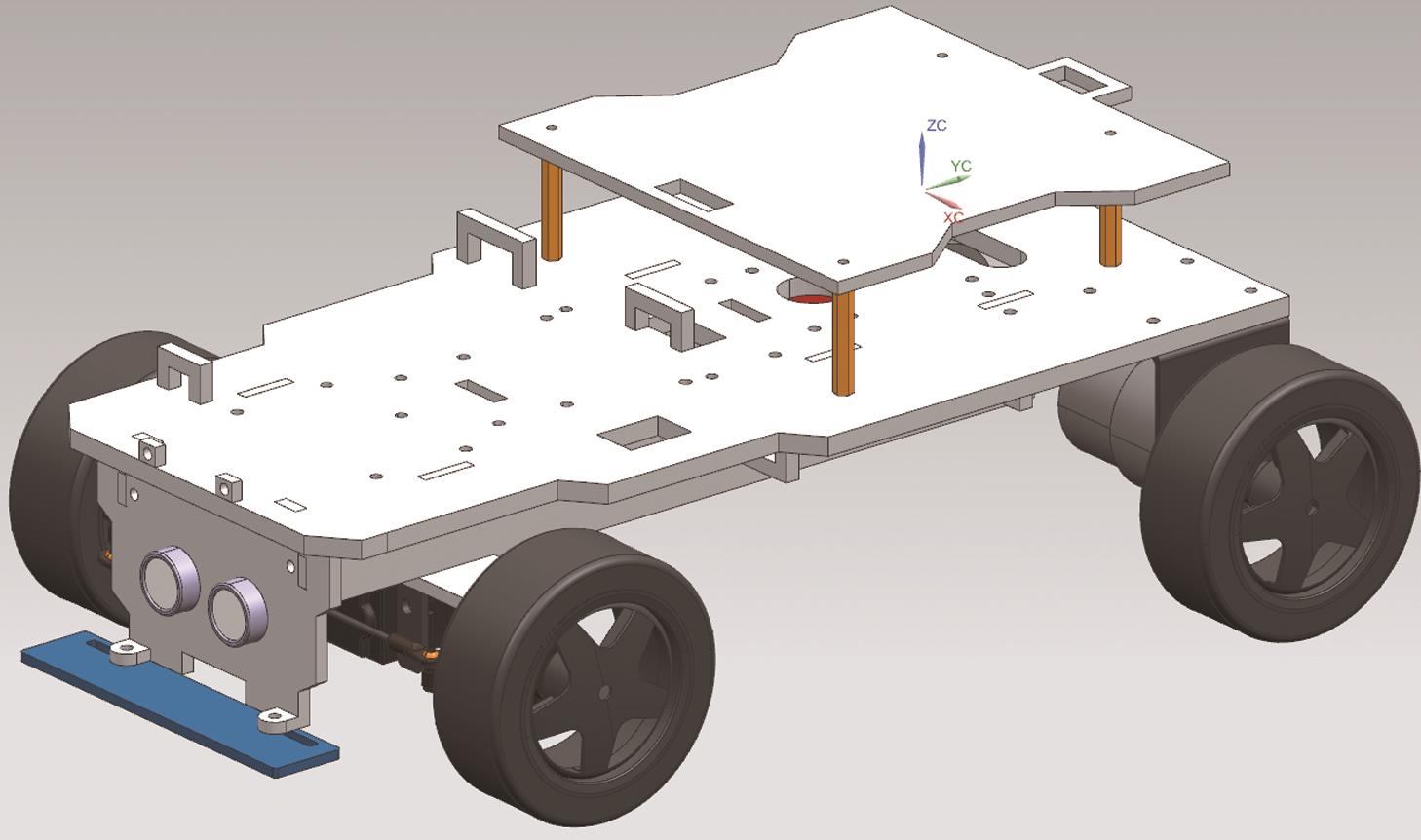
Figure 3 Body structure model diagram
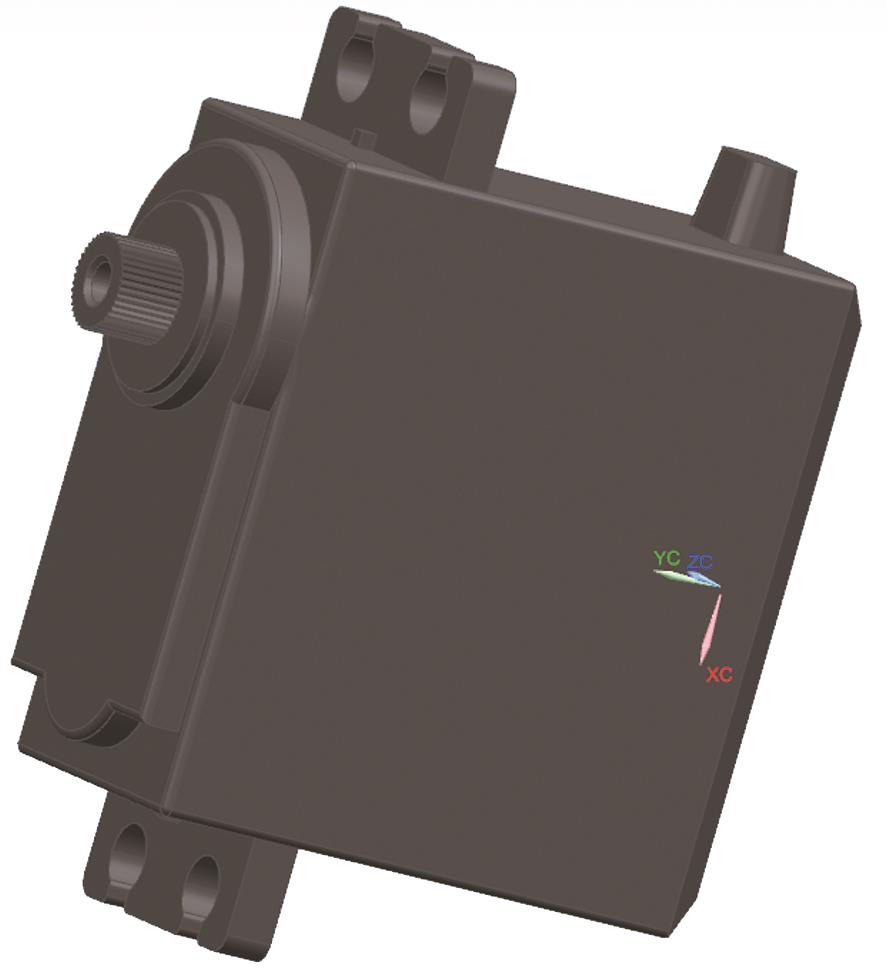
Figure 4 MG945S actuator model diagram
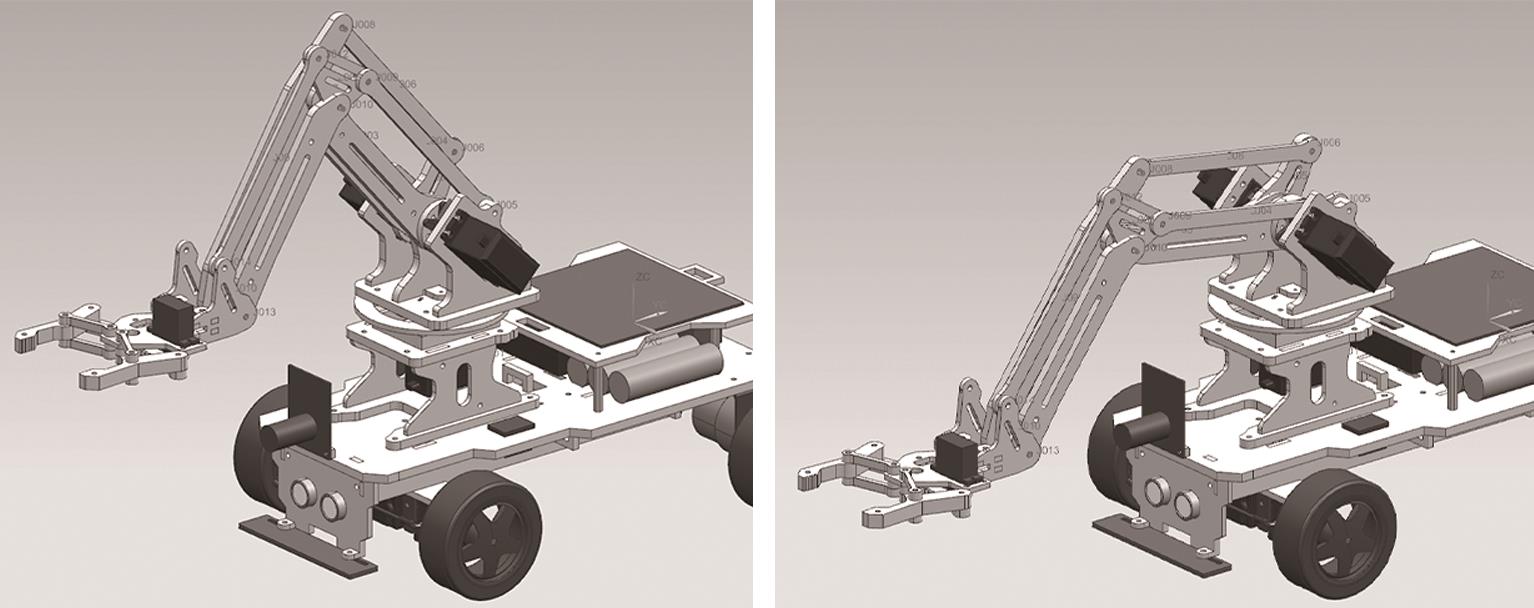
Figure 5 Simulation of the flexion and extension motion of a robotic arm
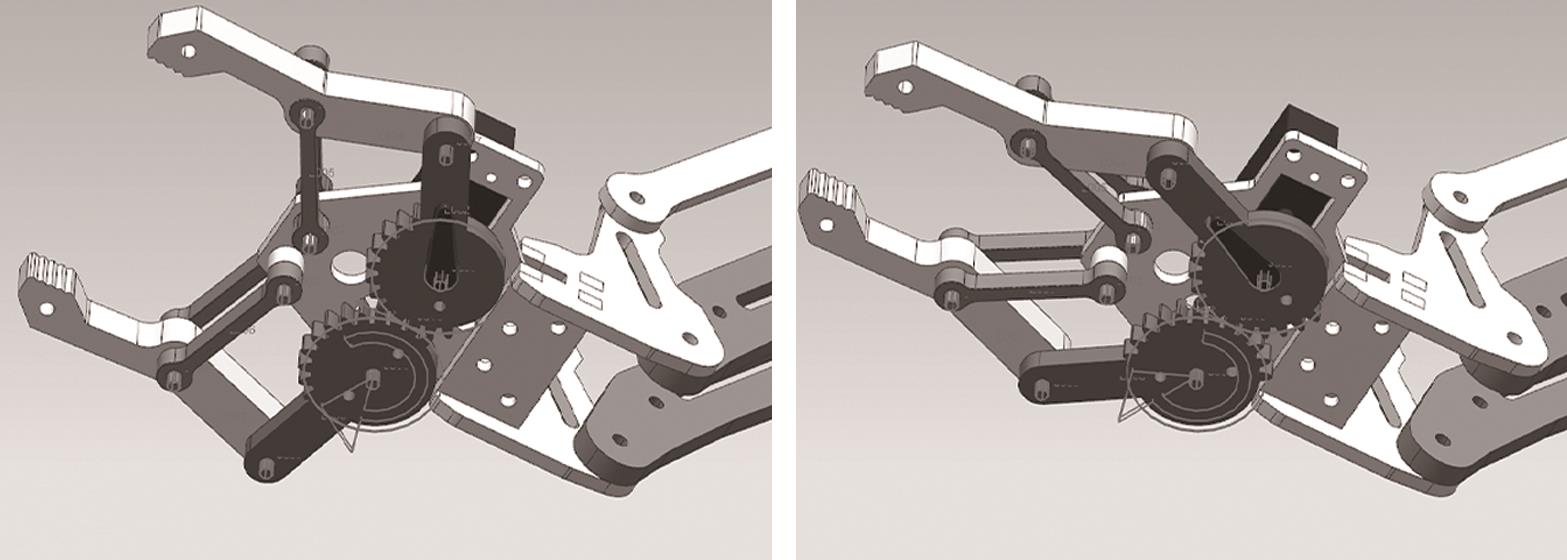
Figure 6 Simulation of the clamping action of a mechanical arm
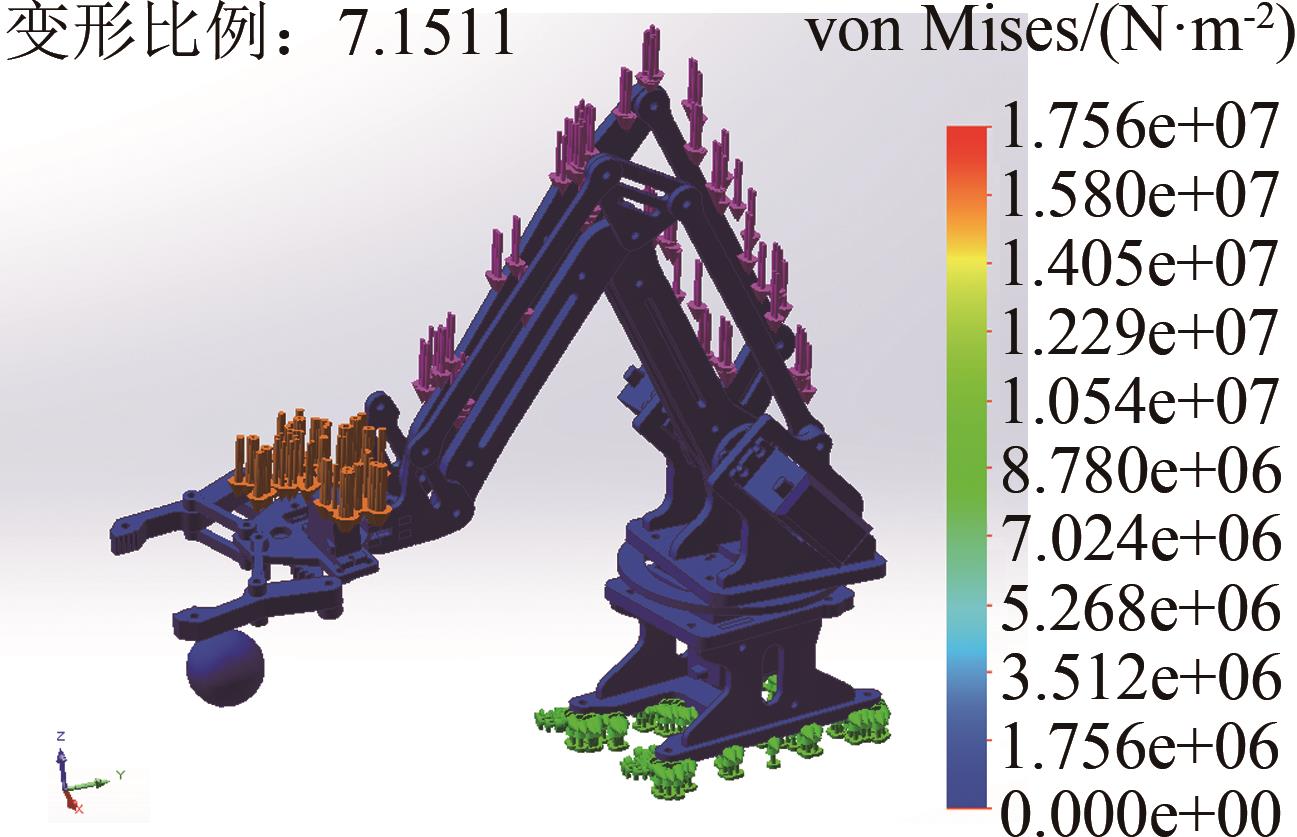
Figure 7 Mechanical arm deformation and force diagram
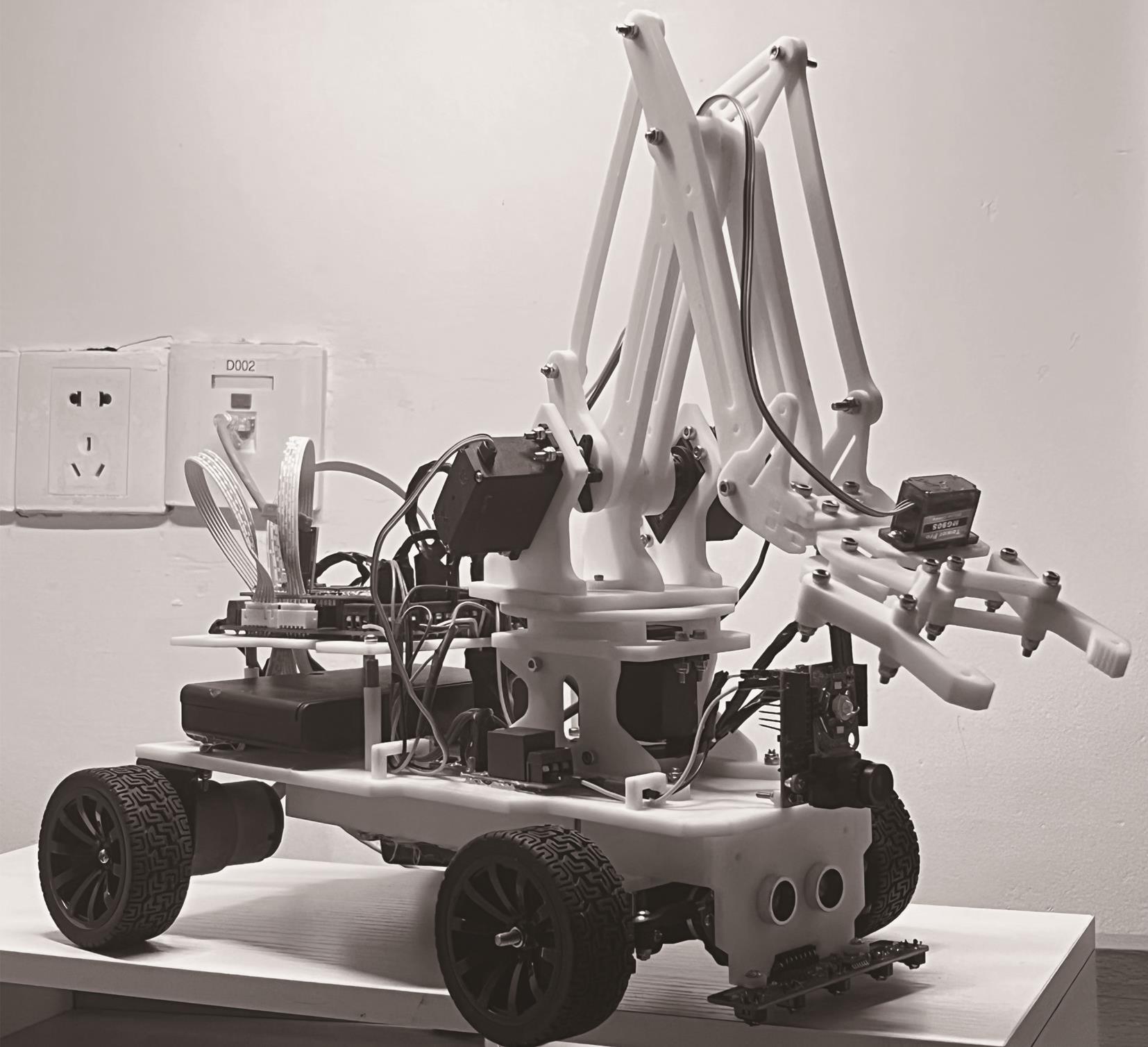
Figure 8 Physical image of intelligent sorting robot
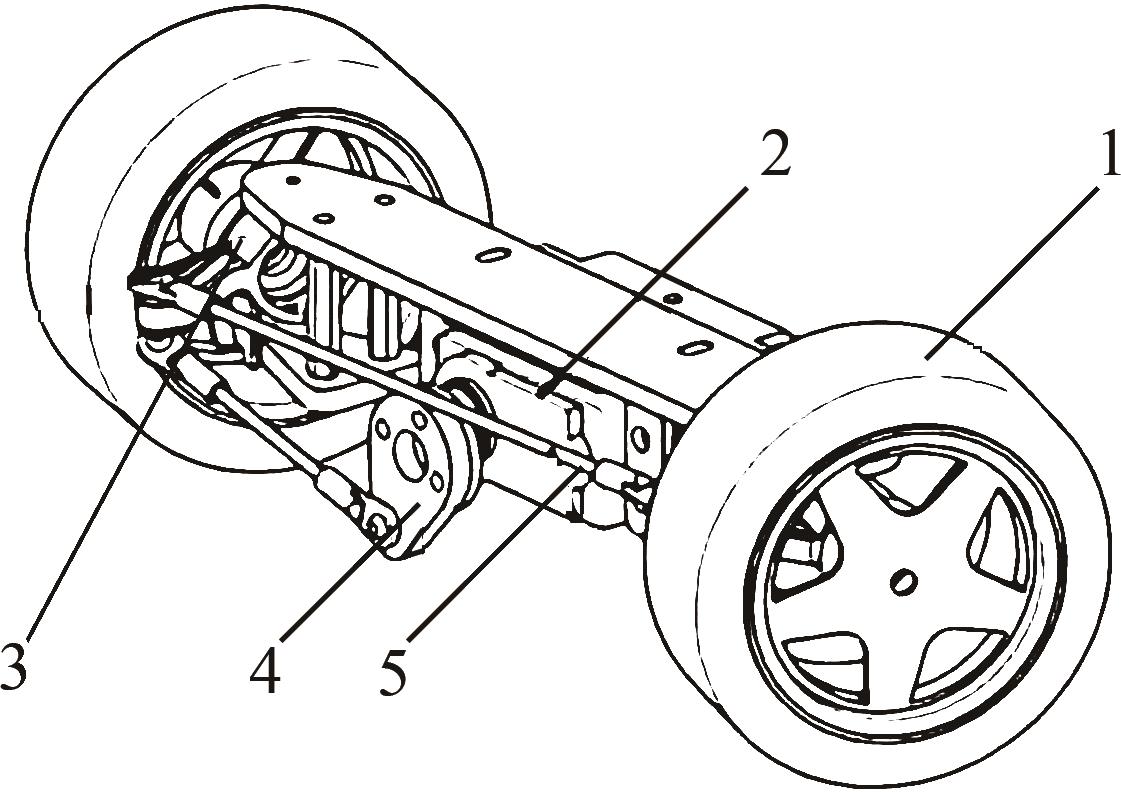
Figure 9 Steering linkage

Figure 10 Mechanical arm flexion and extension structure diagram
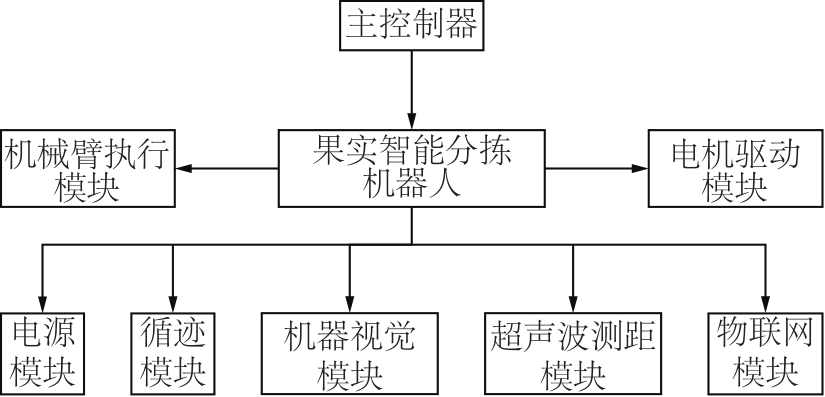
Figure 11 Hardware structure diagram
| 硬件模块名称 | 硬件型号参数 |
|---|---|
| 主控制器 | STM32F103zet6 |
| 联网控制器 | ESP32单片机 |
| 机器视觉模块 | OpenMV |
| 电机驱动模块 | L298N |
| 机械臂舵机 | MG945S数字舵机 |
| 直流减速电机 | MG513P10_12V |
| 电源模块 | LM2596S DC-DC |
| 温湿度传感器 | DHT11 |
| 超声波测距模块 | HC-SR04 |
Table 3 Hardware parameter model
| 硬件模块名称 | 硬件型号参数 |
|---|---|
| 主控制器 | STM32F103zet6 |
| 联网控制器 | ESP32单片机 |
| 机器视觉模块 | OpenMV |
| 电机驱动模块 | L298N |
| 机械臂舵机 | MG945S数字舵机 |
| 直流减速电机 | MG513P10_12V |
| 电源模块 | LM2596S DC-DC |
| 温湿度传感器 | DHT11 |
| 超声波测距模块 | HC-SR04 |

Figure 12 Reset circuit diagram
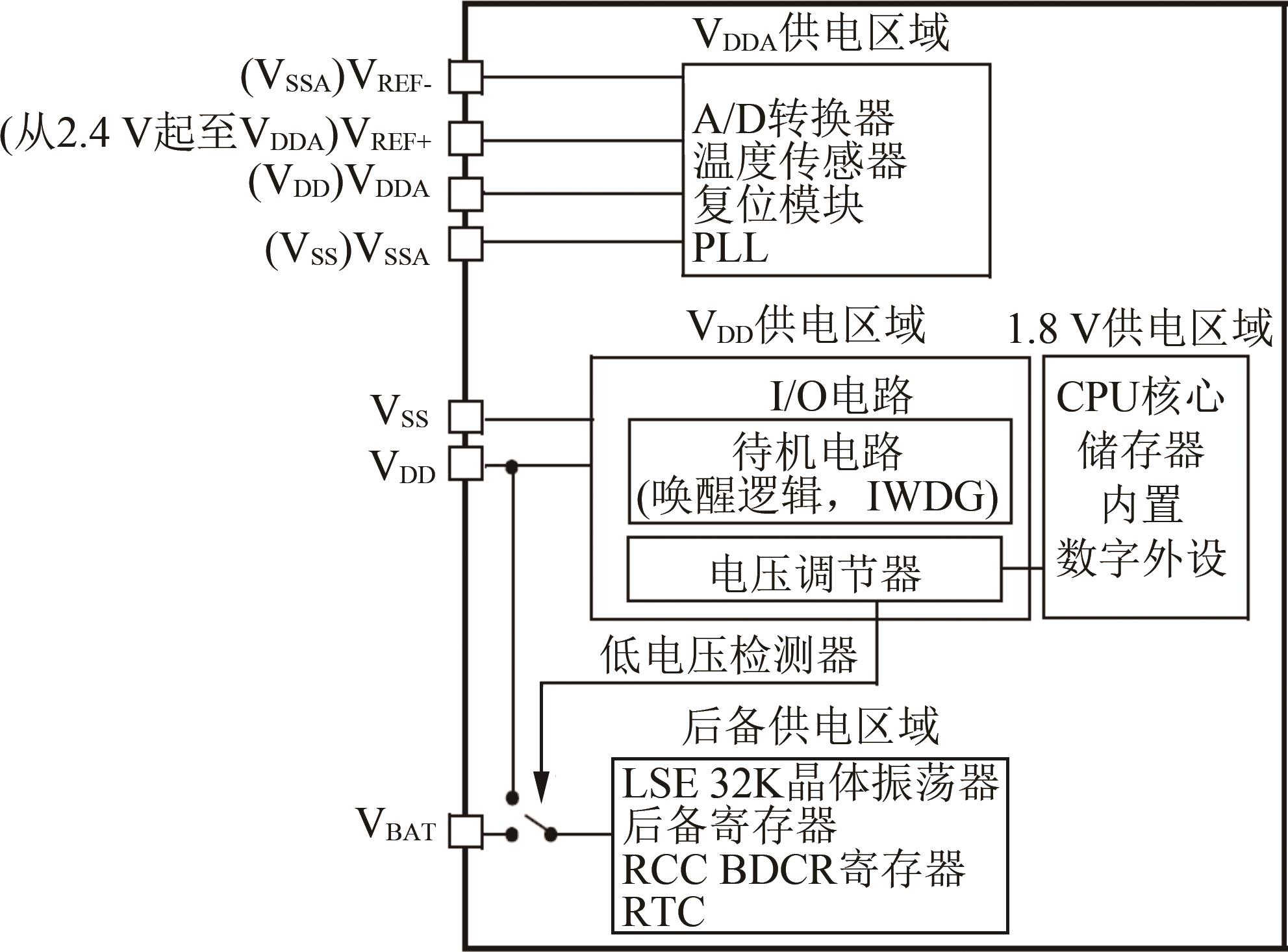
Figure 13 Power circuit diagram
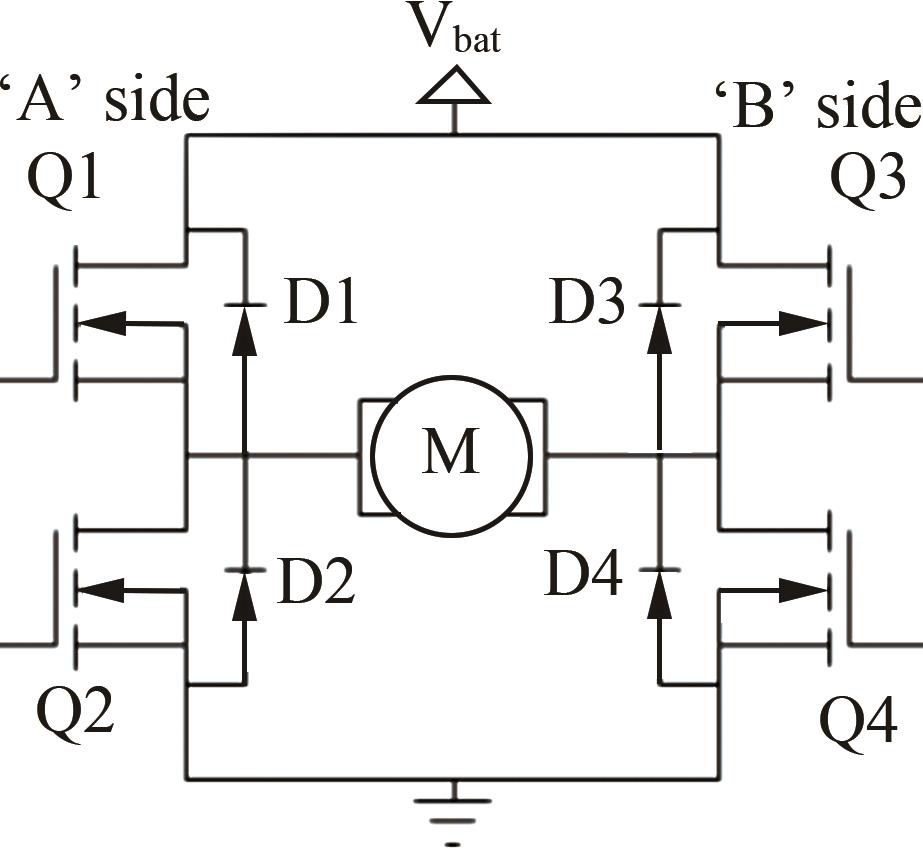
Figure 14 Circuit schematic diagram of dual H-bridge
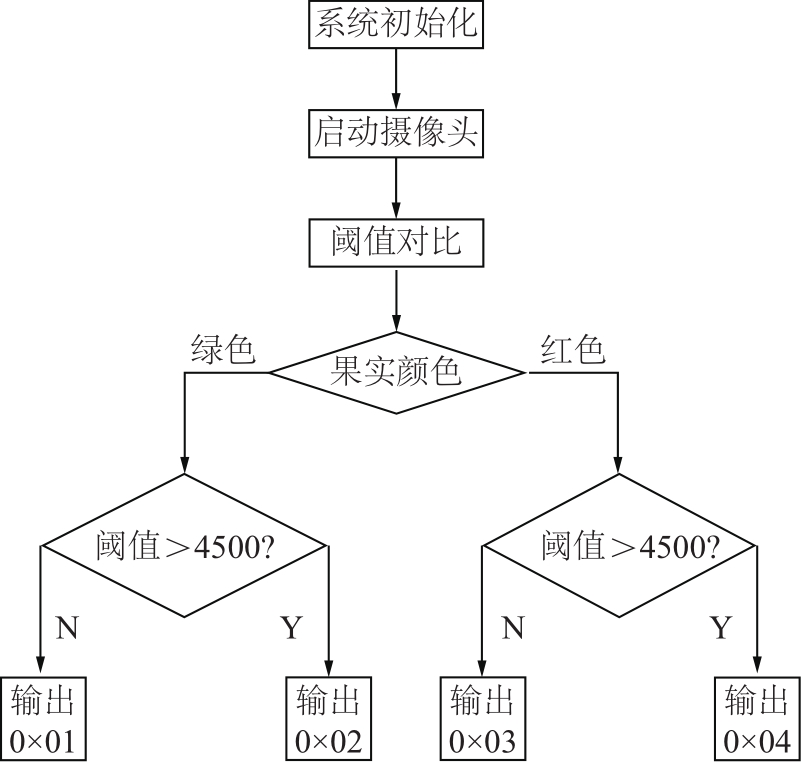
Figure 15 Visual module operation flowchart
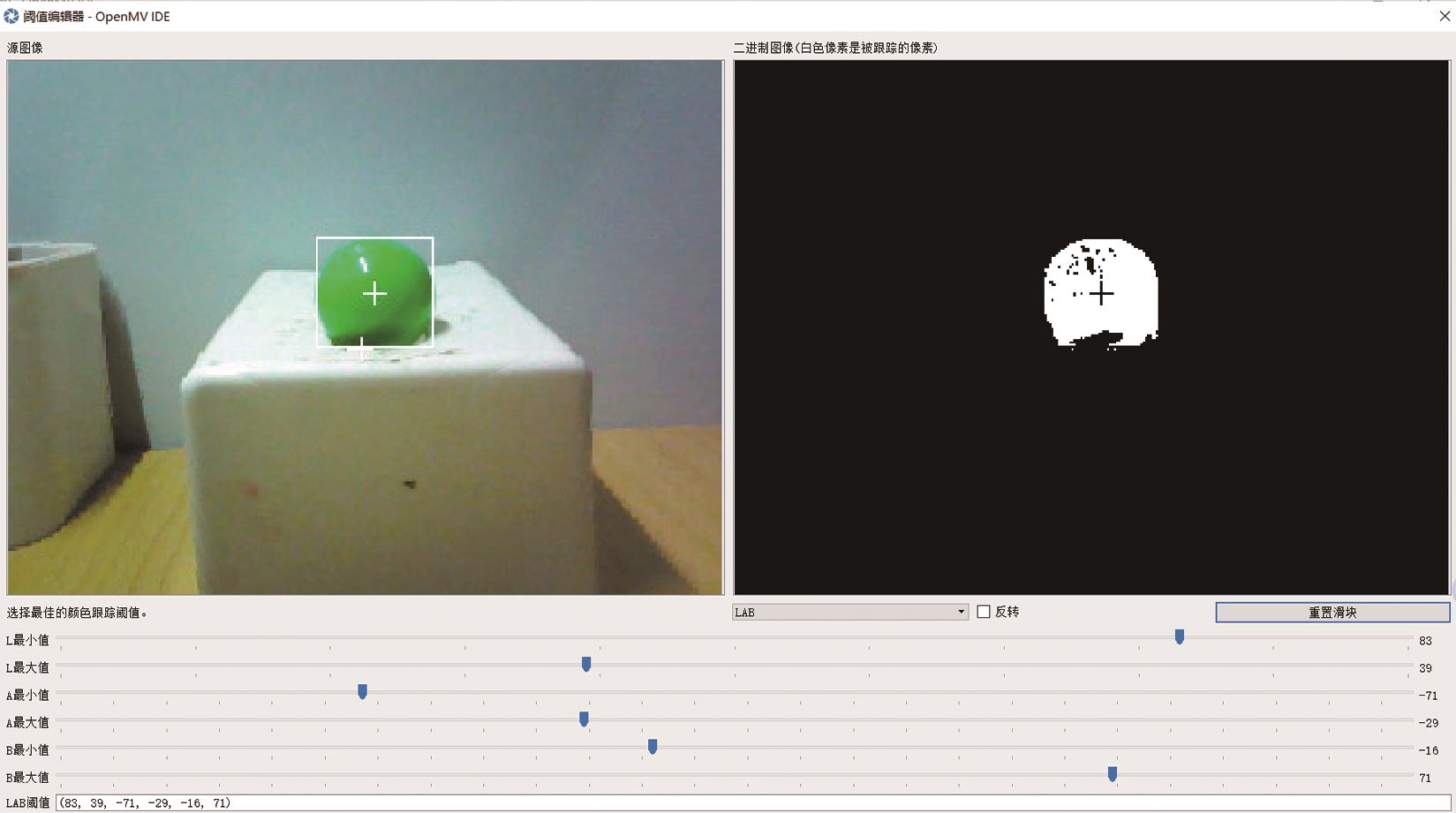
Figure 16 Color threshold determination

Figure 17 Procedure flow chart
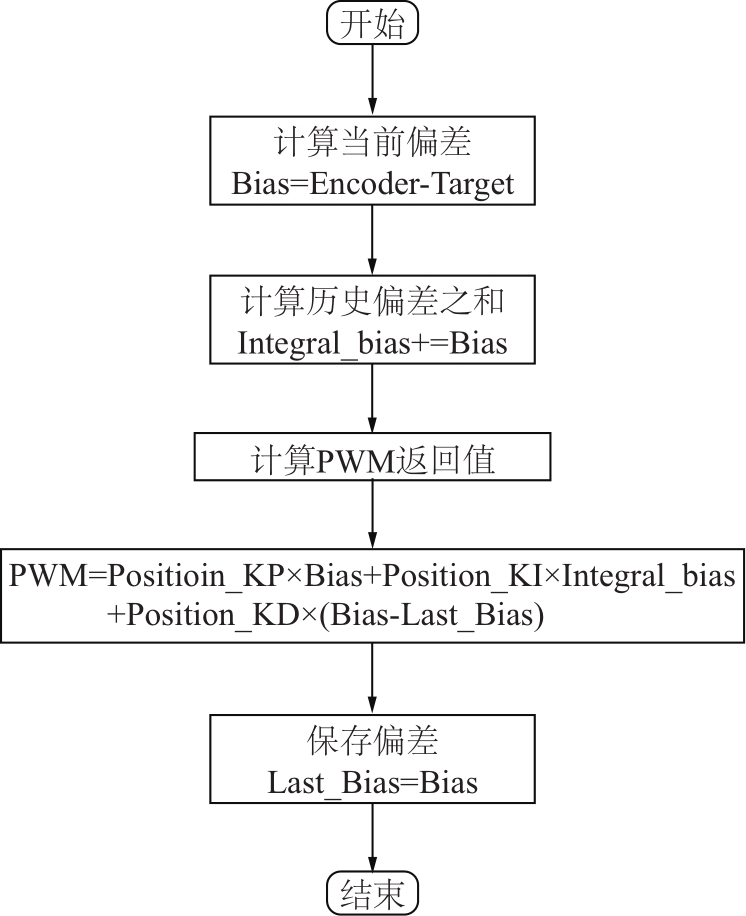
Figure 18 Control procedure flow chart

Figure 19 Geometric modeling of initial position of manipulator
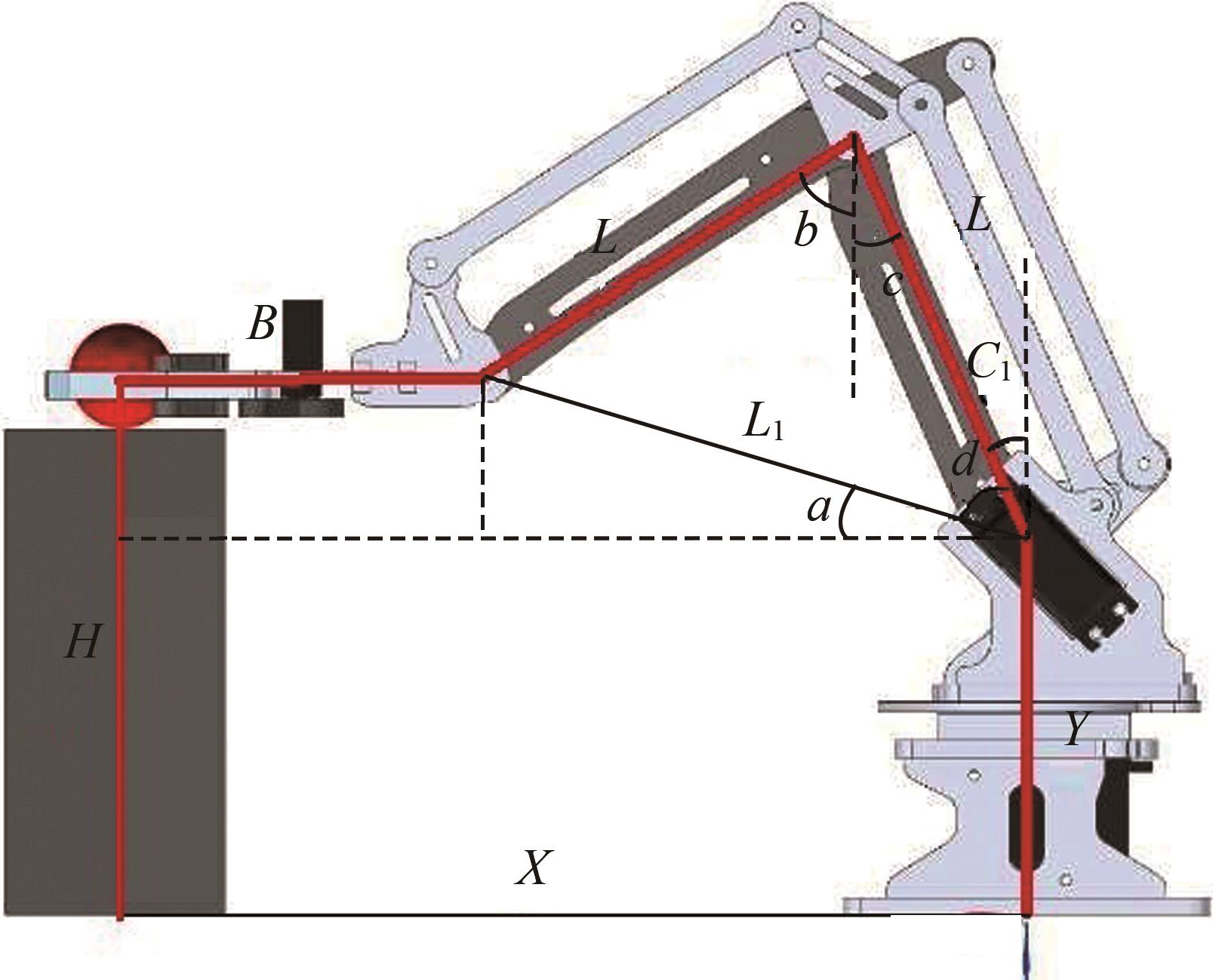
Figure 20 Geometric modeling of the position of the manipulator after rotation
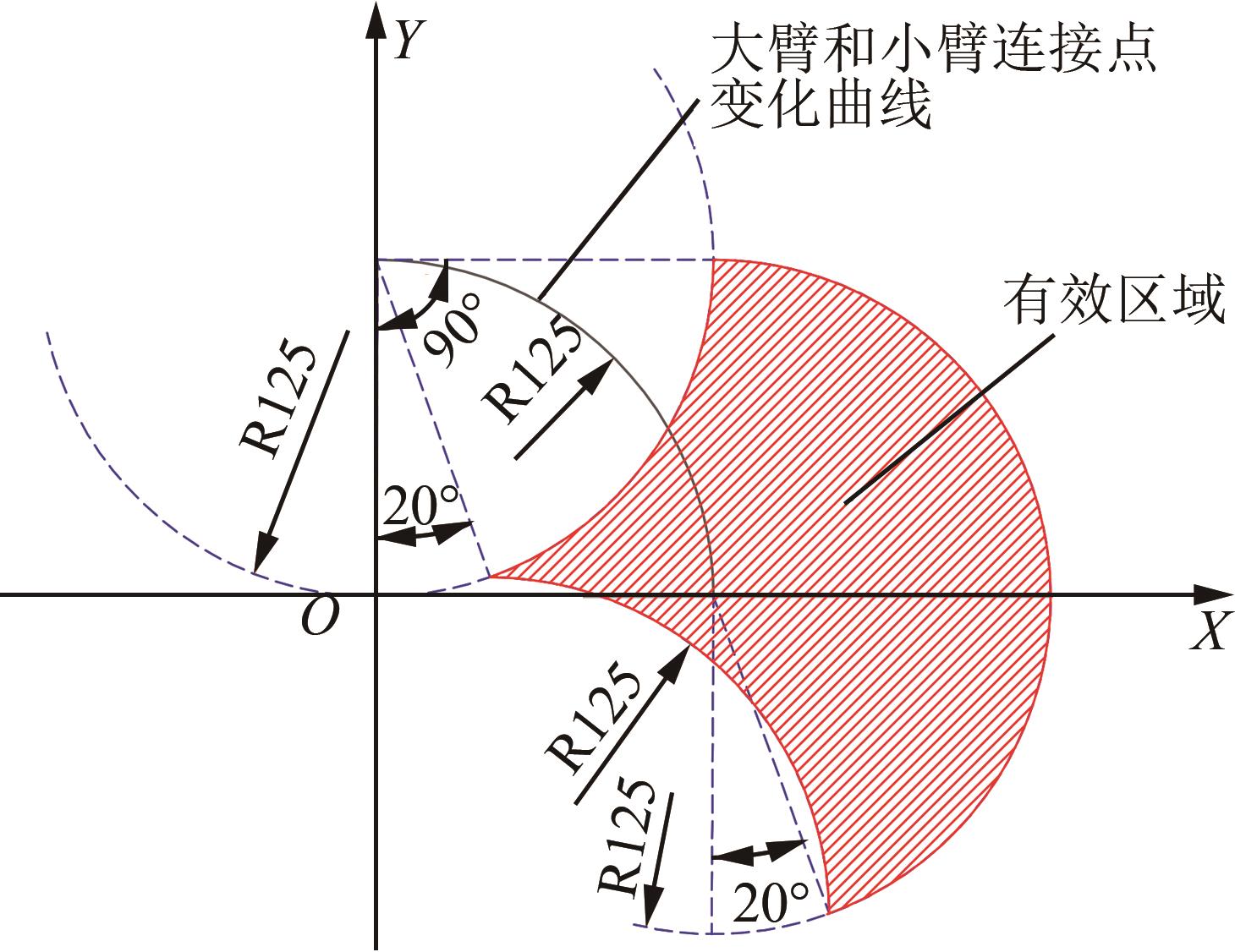
Figure 21 Schematic diagram of effective area
| 果实类别 | 果实数目/个 | 识别数目/个 | 识别率/% | 抓取成功数目/个 | 抓取成功率/% |
|---|---|---|---|---|---|
| 成熟果实(红色小球) | 12 | 12 | 100 | 11 | 87.5 |
| 未成熟果实(绿色小球) | 12 | 12 | 100 | 10 |
Table 4 Data sheet of experimental results
| 果实类别 | 果实数目/个 | 识别数目/个 | 识别率/% | 抓取成功数目/个 | 抓取成功率/% |
|---|---|---|---|---|---|
| 成熟果实(红色小球) | 12 | 12 | 100 | 11 | 87.5 |
| 未成熟果实(绿色小球) | 12 | 12 | 100 | 10 |
| 1 | 农业农村部市场预警专家委员会. 中国农业展望报告(2023-2032)[R]. 北京: 中国农业科学技术出版社, 2023. |
| 2 | 包军民, 支双双, 余有江. 基于STM32的农业采摘机器人设计与实现[J]. 微型电脑应用, 2020, 36(5): 14-19. |
| BAO Junmin, ZHI Shuangshuang, YU Youjiang. Design and implementation of agricultural harvesting robot based on STM32 [J]. Microcomputer Applications,2020,36(5): 14-19. | |
| 3 | 唐媛红, 刘月云. 基于机器视觉的采摘机器人分拣控制研究[J]. 农机化研究, 2021, 43(11): 216-220. |
| TANG Yuanhong, LIU Yueyun. Research on picking robot sorting control based on machine vision [J]. Journal of Agricultural Mechanization Research, 2021, 43(11): 216-220. | |
| 4 | 刘明涛, 刘亚, 郭俊先. 水果无损检测技术的研究与应用[J].农业科技与装备, 2017(6): 51-55. |
| LIU Mingtao, LIU Ya, GUO Junxian. Research and application on fruit nondestructive detection technology [J]. Agricultural Science & Technology and Equipment, 2017(6): 51-55. | |
| 5 | 代泽繁, 秦剑锋, 江英杰, 等. 百香果分拣装置的设计与研究[J]. 轻工科技, 2019, 35(10): 39-40. |
| 6 | 罗家宁, 贺泉, 张思豪, 等. 一种教学用采摘竞赛机器人[J]. 机电工程技术, 2021, 50(12): 131-134. |
| LUO Jianing, HE Quan, ZHANG Sihao,et al. A picking competition robot for teaching [J]. Mechanical & Electrical Engineering Technology, 2021, 50(12): 131-134. | |
| 7 | 许联航. 四轴支架搬运车转向机构设计[J]. 陕西煤炭, 2023, 42(1): 116-120, 133. |
| XU Lianhang. Design of steering mechanism for four axle support carrier [J]. Shaanxi Coal,2023, 42(1): 116-120, 133. | |
| 8 | 袁琛, 陈飞, 谢启, 等. 基于STM32和QT平台的农业大棚远程监控系统设计[J]. 常熟理工学院学报, 2023, 37(2): 26-32. |
| YUAN Chen, CHEN Fei, XIE Qi,et al. Design of remote monitoring system for agricultural greenhouse based on STM32 and QT platform [J]. Journal of Changshu Institute of Technology, 2023, 37(2): 26-32. | |
| 9 | 秦学珍, 刘萍. 基于STM32的智能耕种机器人系统设计[J]. 无线互联科技, 2022, 19(7): 66-67. |
| QIN Xuezhen, LIU Ping. Design of intelligent farming robot system based on STM32 [J]. Wireless Internet Technology, 2022, 19(7): 66-67. | |
| 10 | 李敏, 田开坤. 基于ARM控制器对齿轮减速同步电机的精确控制[J]. 湖北师范大学学报(自然科学版), 2022, 42(3): 42-47. |
| LI Min, TIAN Kaikun. Precise control of gear reduction synchronous motor based on ARM controller [J]. Journal of Hubei Normal University(Natural Science), 2022, 42(3): 42-47. | |
| 11 | 施志荣. 基于STM32F407的无刷电机调速系统设计[J]. 九江学院学报(自然科学版), 2022, 37(2): 27-30. |
| SHI Zhirong. Study on plastic behavior of micro scale metals based on strain gradient [J]. Journal of Jiujiang University (Natural Science Edition), 2022, 37(2): 27-30. | |
| 12 | 张怡, 于佳, 杨铭, 等. 基于STM32的智能坦克车系统研究[J]. 电子设计工程, 2018, 26(10): 129-133. |
| ZHANG Yi, YU Jia, YANG Ming,et al. Study on intelligent tank system based on STM32 [J]. Electronic Design Engineering, 2018, 26(10): 129-133. | |
| 13 | 付书添, 查雪红, 许超. 基于OpenMV视觉系统的智能送药分拣机器人[J]. 工业控制计算机, 2022, 35(7): 6-9. |
| FU Shutian, ZHA Xuehong, XU Chao. Smart medicine car based on OpenMV vision system [J]. Industrial Control Computer, 2022, 35(7): 6-9. | |
| 14 | 郑可建, 张劲东, 黄少波. 基于OpenMV视觉分拣机器人的研发[J]. 电子制作, 2022, 30(9): 27-30. |
| 15 | 刘昌林. 基于STM32单片机的智能避障分拣机器人设计[J]. 科技风, 2022(23): 1-3. |
| 16 | 赵鹏, 钱美, 李帅波. 单片机PID电机转速与位置控制系统设计[J]. 工业仪表与自动化装置, 2022(4): 24-27, 44. |
| ZHAO Peng, QIAN Mei, LI Shuaibo. Design of microcontroller PID motor speed and position control system [J]. Industrial Instrumentation & Automation, 2022(4): 24-27, 44. | |
| 17 | 邓良益, 易佳, 王浩, 等. 一种基于PID算法的智能分拣机器人设计[J]. 科技创新与应用, 2019(30): 93-94. |
| 18 | 周子楠, 杨琦, 何海燕. 基于STM32的智能物流机器人的设计[J]. 九江学院学报(自然科学版), 2020, 35(2): 71-77. |
| ZHOU Zinan, YANG Qi, HE Haiyan. Design of intelligent logistics robot based on STM32 [J]. Journal of Jiujiang University(Natural Sciences), 2020, 35(2): 71-77. | |
| 19 | 曹孟哲, 焦慧敏, 焦心愿,等. 五自由度串联机械臂的几何逆向求解[J]. 制造业自动化, 2022, 44(12): 197-200. |
| ZHOU Zinan, YANG Qi, HE Haiyan,et al. Geometric inverse solution of 5-DOF robot arm system [J]. Manufacturing Automation, 2022, 44(12): 197-200. | |
| 20 | 孙浩洋, 曹彦, 卞科琪, 等. 基于九点标定机械臂抓取的设计及应用[J]. 现代工业经济和信息化, 2023, 13(1): 107-109, 144. |
| SUN Haoyang, CAO Yan, BIAN Keqi,et al. Design and application of a nine-point calibration-based robotic arm for gripping [J]. Modern Industrial Economy and Informationization, 2023, 13(1): 107-109, 144. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||