ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2024, Vol. 5 ›› Issue (2): 33-41.DOI: 10.12398/j.issn.2096-7217.2024.02.004
Previous Articles Next Articles
FENG Shuang1,2( ), ZHANG Zhaoguo1,2(), SUN Lianzhu1,2, WANG Fa'an1,2, XIE Kaiting1,2,3
), ZHANG Zhaoguo1,2(), SUN Lianzhu1,2, WANG Fa'an1,2, XIE Kaiting1,2,3
Received:2024-02-01
Revised:2024-03-20
Online:2024-05-15
Published:2024-05-15
Corresponding author:
ZHANG Zhaoguo
CLC Number:
FENG Shuang, ZHANG Zhaoguo, SUN Lianzhu, WANG Fa'an, XIE Kaiting. Research on deflection angle measurement system of tractor guide wheel based on GNSS/INS[J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(2): 33-41.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2024.02.004

Figure 1 System installation diagram

Figure 2 Test platform for tractor automatic navigation control system
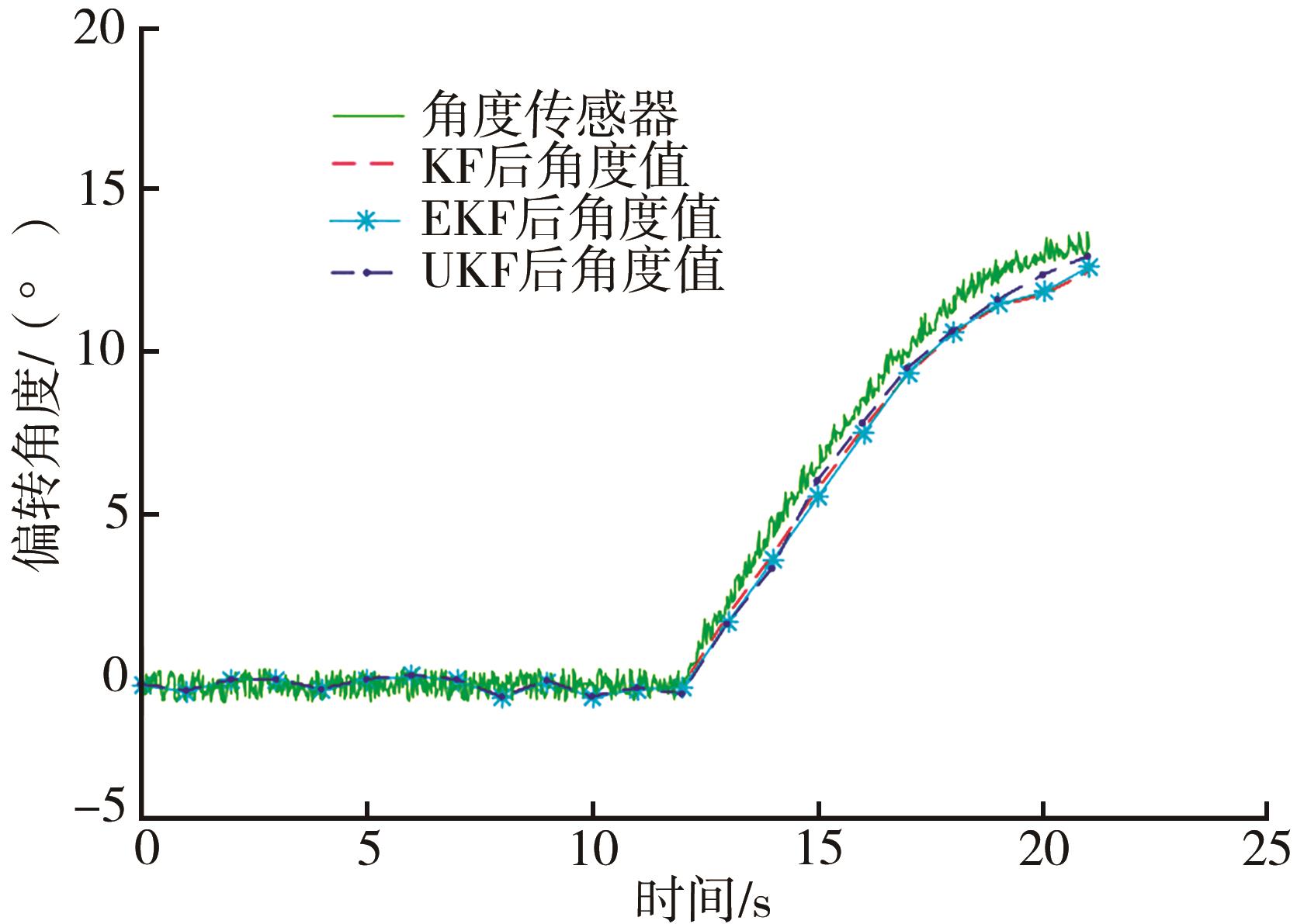
Figure 3 Large angle right deflection filter curve
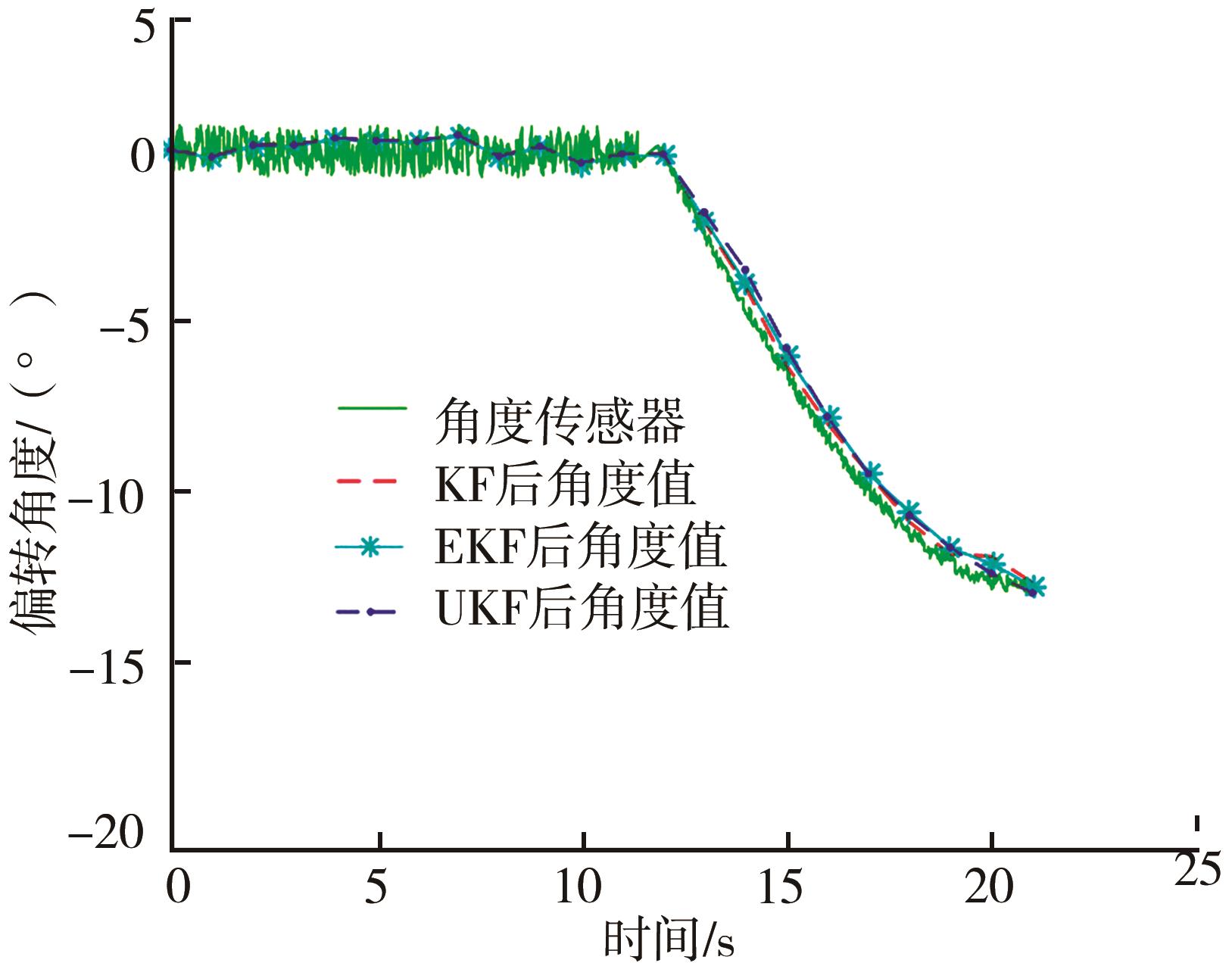
Figure 4 Large angle left deflection filter curve
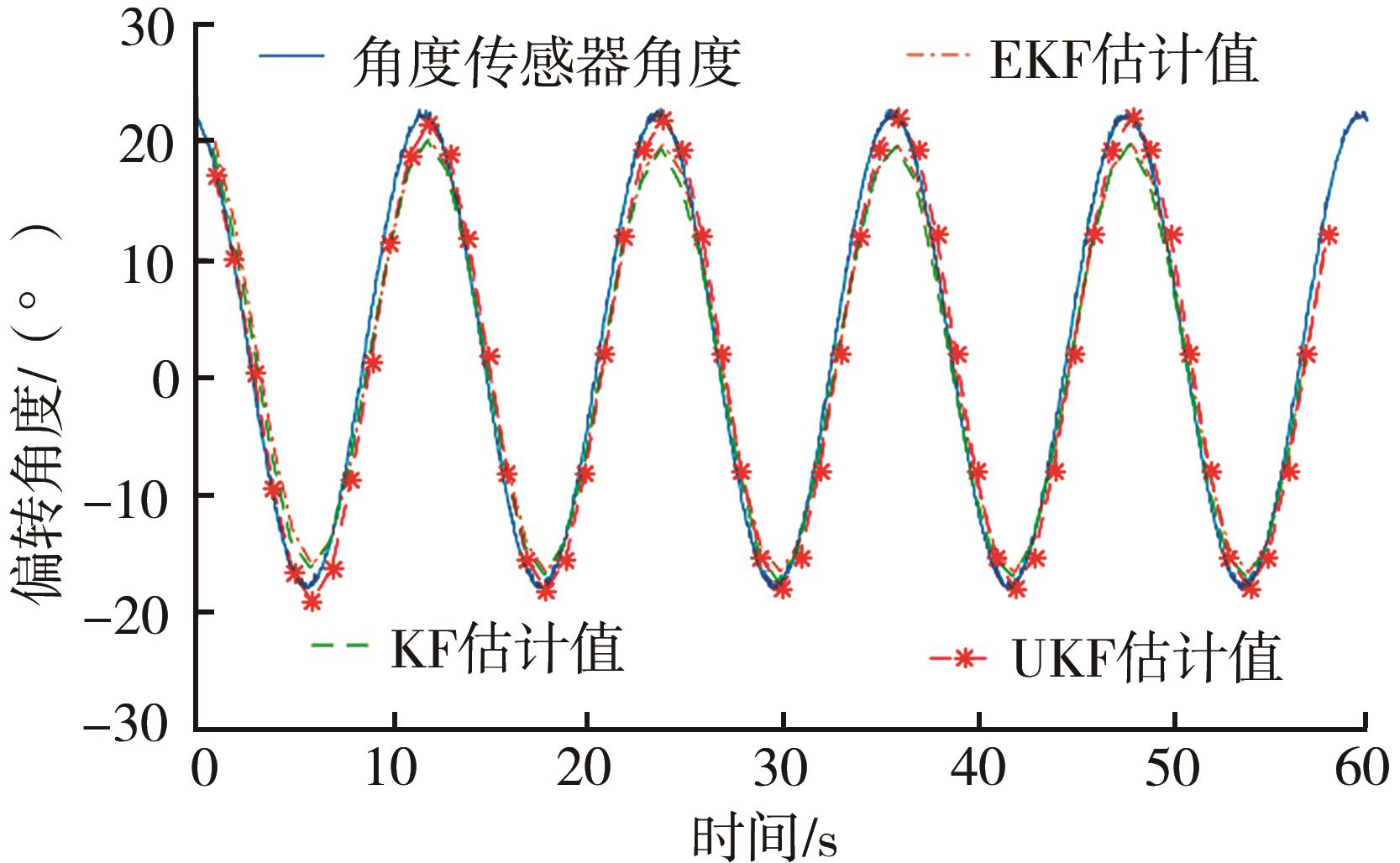
Figure 5 S-Curve driving filter test results
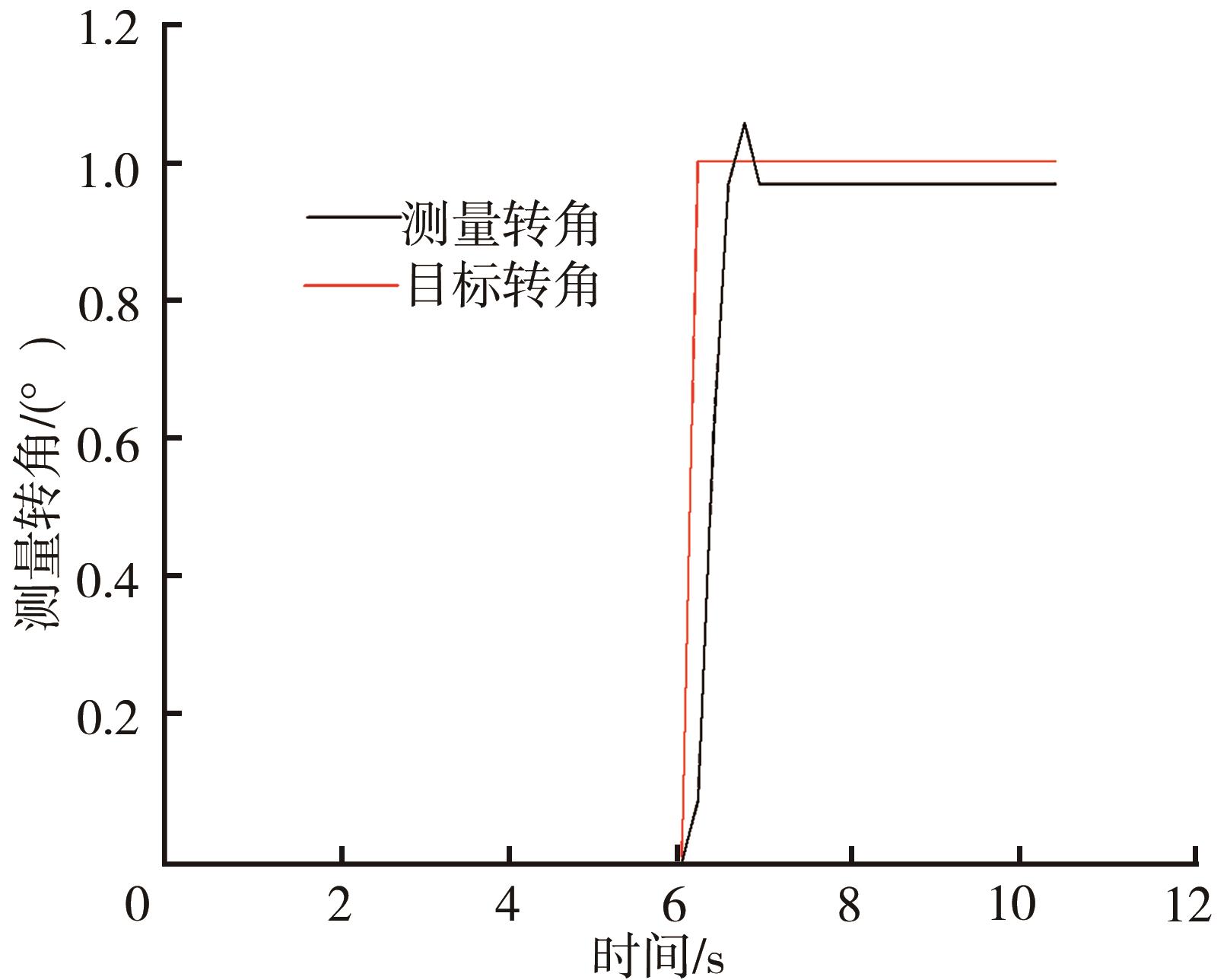
Figure 6 Measurement result with 1° deflection

Figure 7 Measurement result with 5° deflection
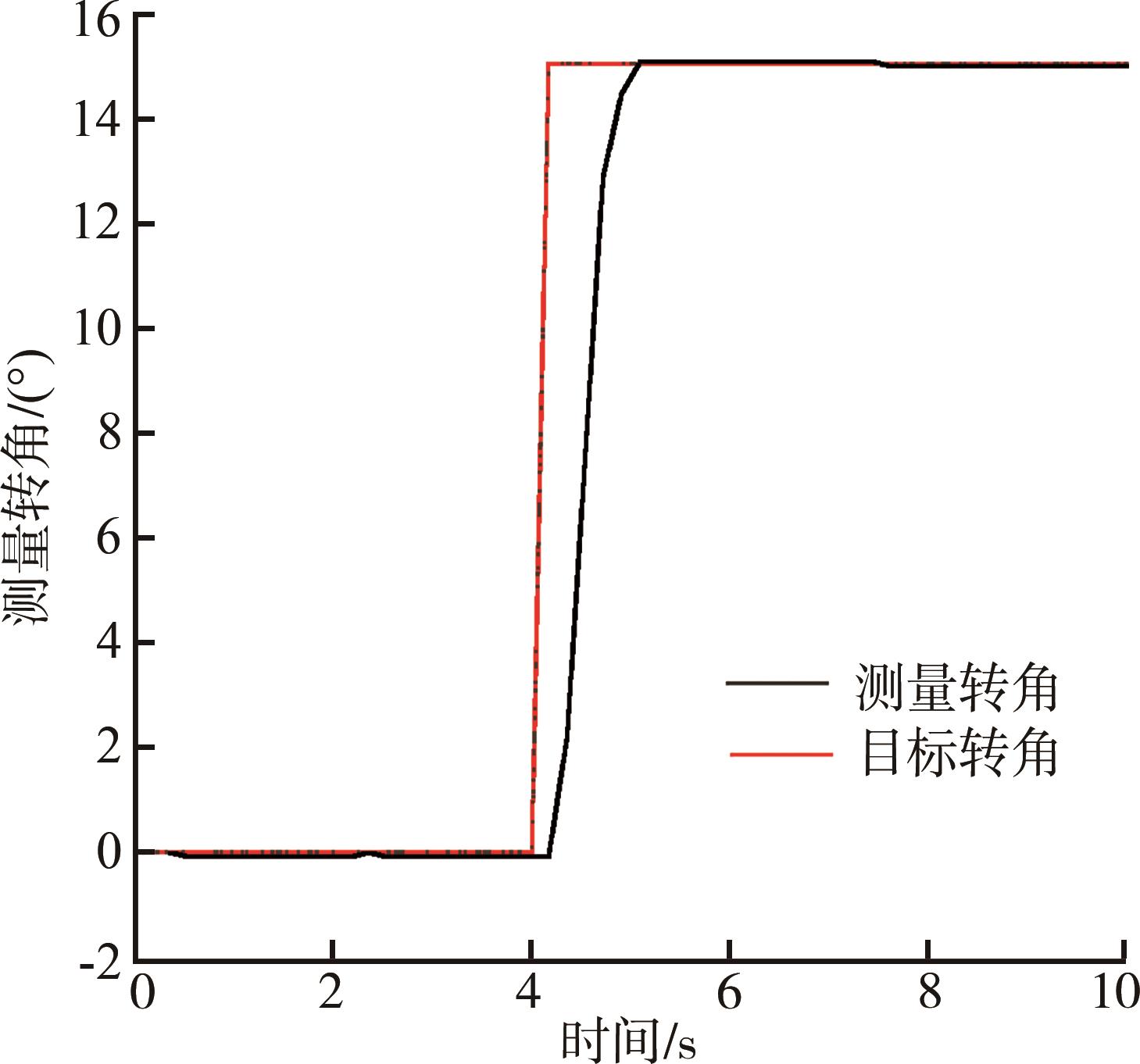
Figure 8 Measurement result with 15° deflection
| 转角角度/(°) | 延迟时间/s | 上升时间/s | 峰值时间/s | 调节时间/s | 超调量/% | 绝对误差/(°) | 稳态误差/% |
|---|---|---|---|---|---|---|---|
| 1 | 0.128 | 0.311 | 0.734 | 0.906 | 5.500 | 0.033 | 3.3 |
| 5 | 0.112 | 0.799 | 0.921 | 1.093 | 无超调 | 0.167 | 3.340 |
| 15 | 0.141 | 0.628 | 0.922 | 0.922 | 无超调 | 0.029 | 0.193 |
Table 1 Measurement results of asphalt pavement deflection system
| 转角角度/(°) | 延迟时间/s | 上升时间/s | 峰值时间/s | 调节时间/s | 超调量/% | 绝对误差/(°) | 稳态误差/% |
|---|---|---|---|---|---|---|---|
| 1 | 0.128 | 0.311 | 0.734 | 0.906 | 5.500 | 0.033 | 3.3 |
| 5 | 0.112 | 0.799 | 0.921 | 1.093 | 无超调 | 0.167 | 3.340 |
| 15 | 0.141 | 0.628 | 0.922 | 0.922 | 无超调 | 0.029 | 0.193 |
| 转角角度/(°) | 延迟时间/s | 上升时间/s | 峰值时间/s | 调节时间/s | 超调量/% | 绝对误差/(°) | 稳态误差/% |
|---|---|---|---|---|---|---|---|
| 1 | 0.162 | 0.450 | 0.547 | 0.547 | 5.400 | 0.083 | 8.300 |
| 5 | 0.242 | 0.432 | 0.719 | 1.266 | 0.002 | 0.010 | 0.200 |
| 15 | 0.134 | 0.526 | 0.719 | 1.453 | 0.780 | 0.235 | 1.566 |
Table 2 Measurements of environmental deflection systems in agricultural fields
| 转角角度/(°) | 延迟时间/s | 上升时间/s | 峰值时间/s | 调节时间/s | 超调量/% | 绝对误差/(°) | 稳态误差/% |
|---|---|---|---|---|---|---|---|
| 1 | 0.162 | 0.450 | 0.547 | 0.547 | 5.400 | 0.083 | 8.300 |
| 5 | 0.242 | 0.432 | 0.719 | 1.266 | 0.002 | 0.010 | 0.200 |
| 15 | 0.134 | 0.526 | 0.719 | 1.453 | 0.780 | 0.235 | 1.566 |
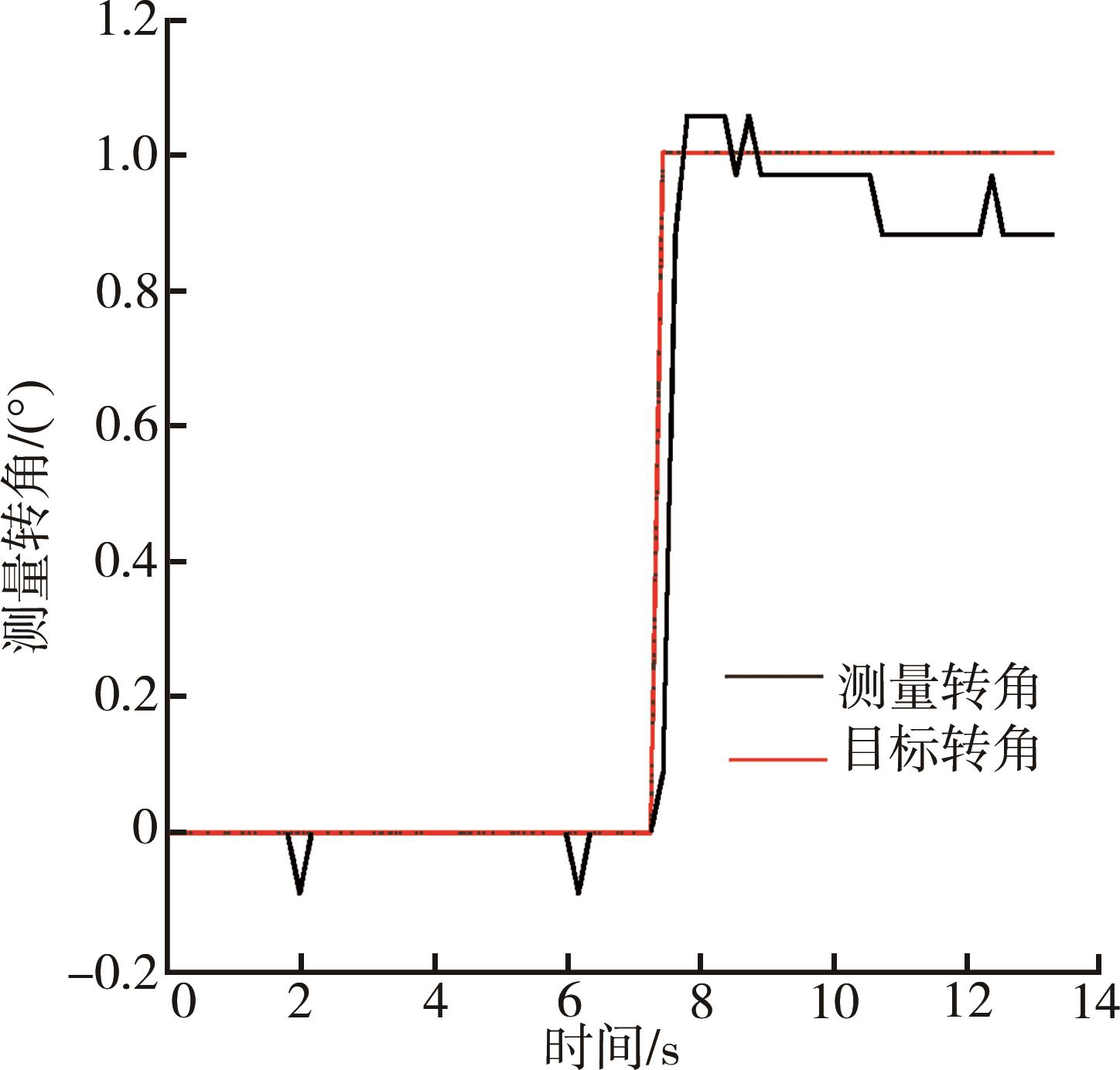
Figure 9 Measurement result with 1° deflection
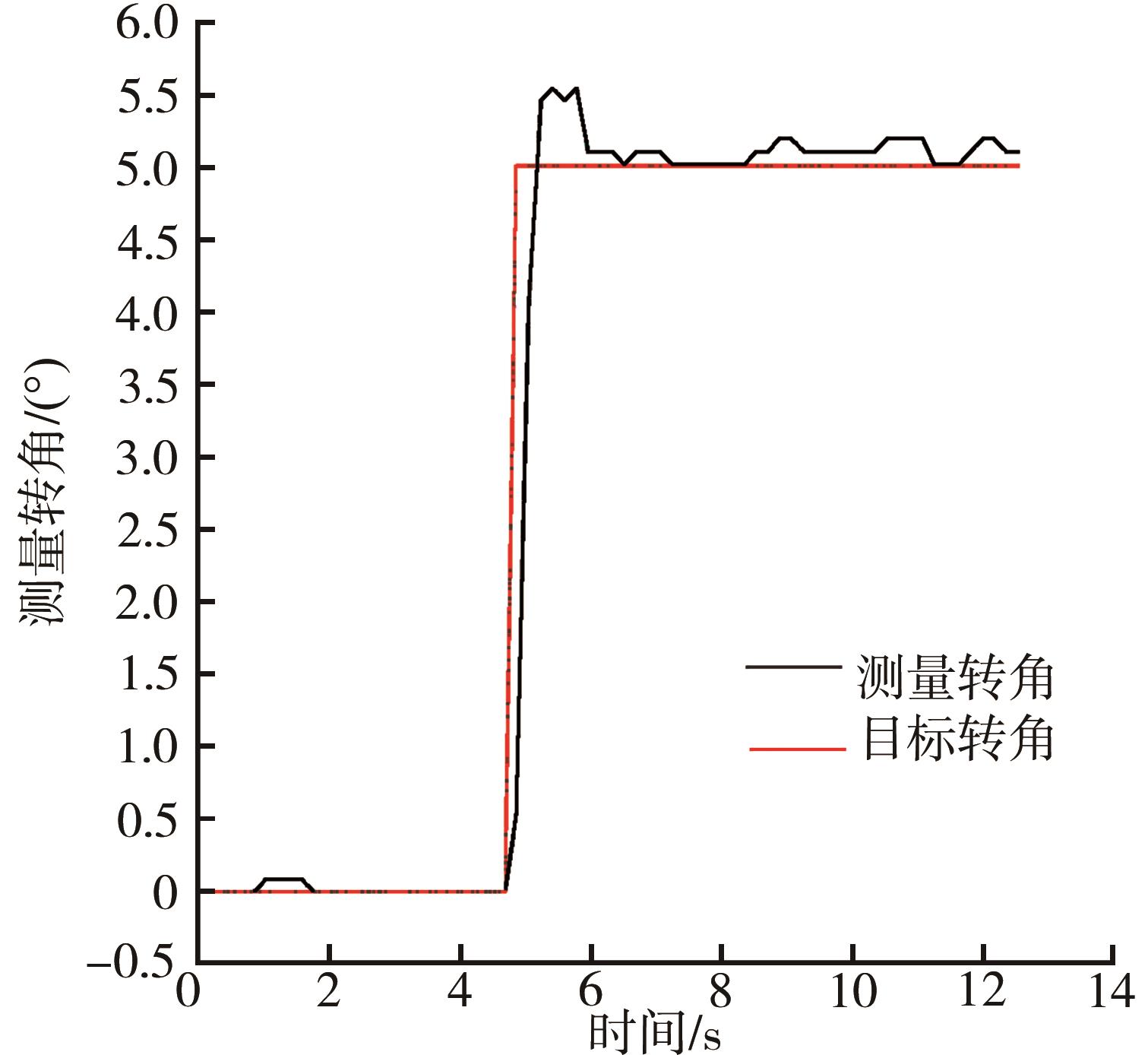
Figure 10 Measurement result with 5° deflection
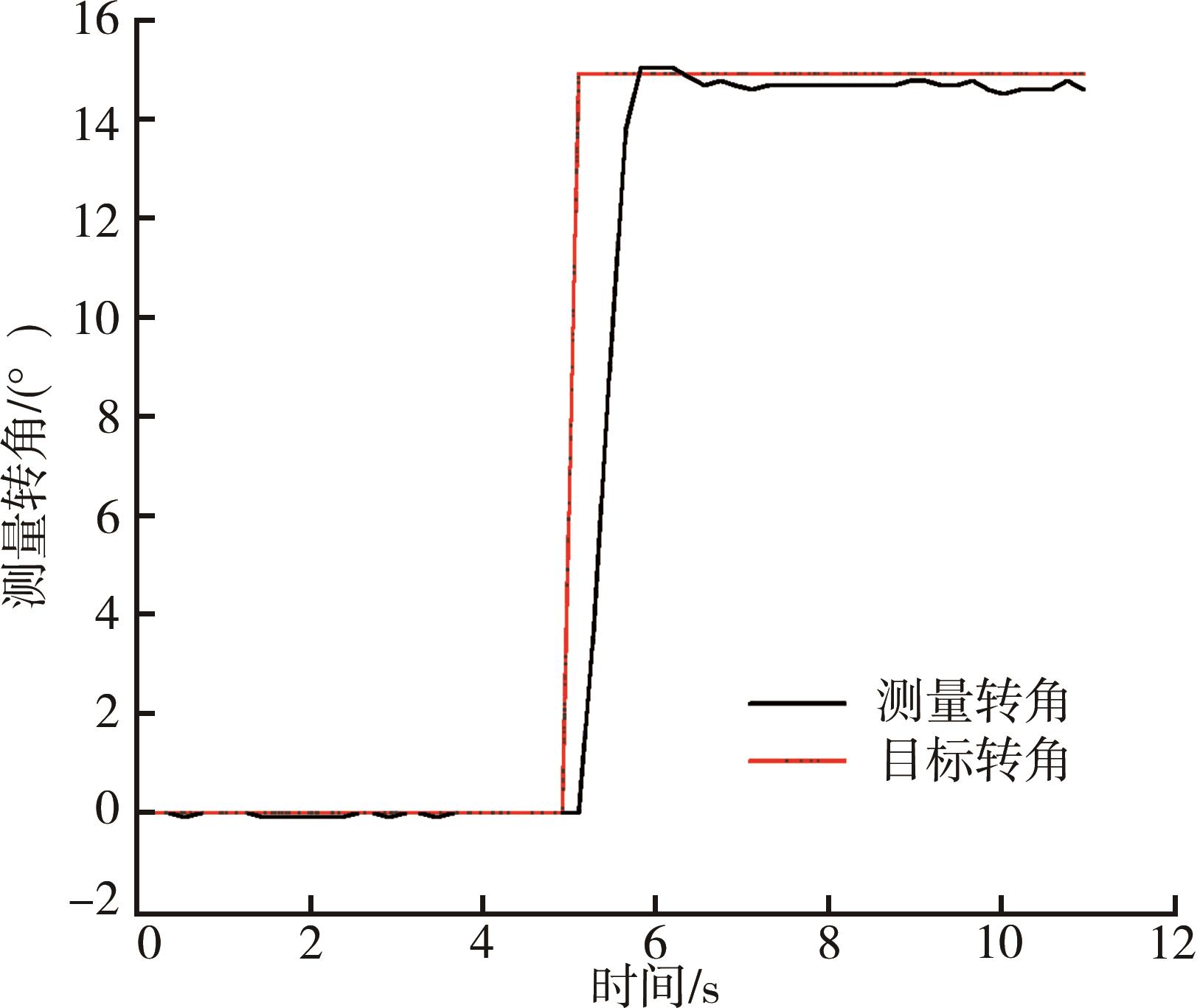
Figure 11 Measurement result with 15° deflection
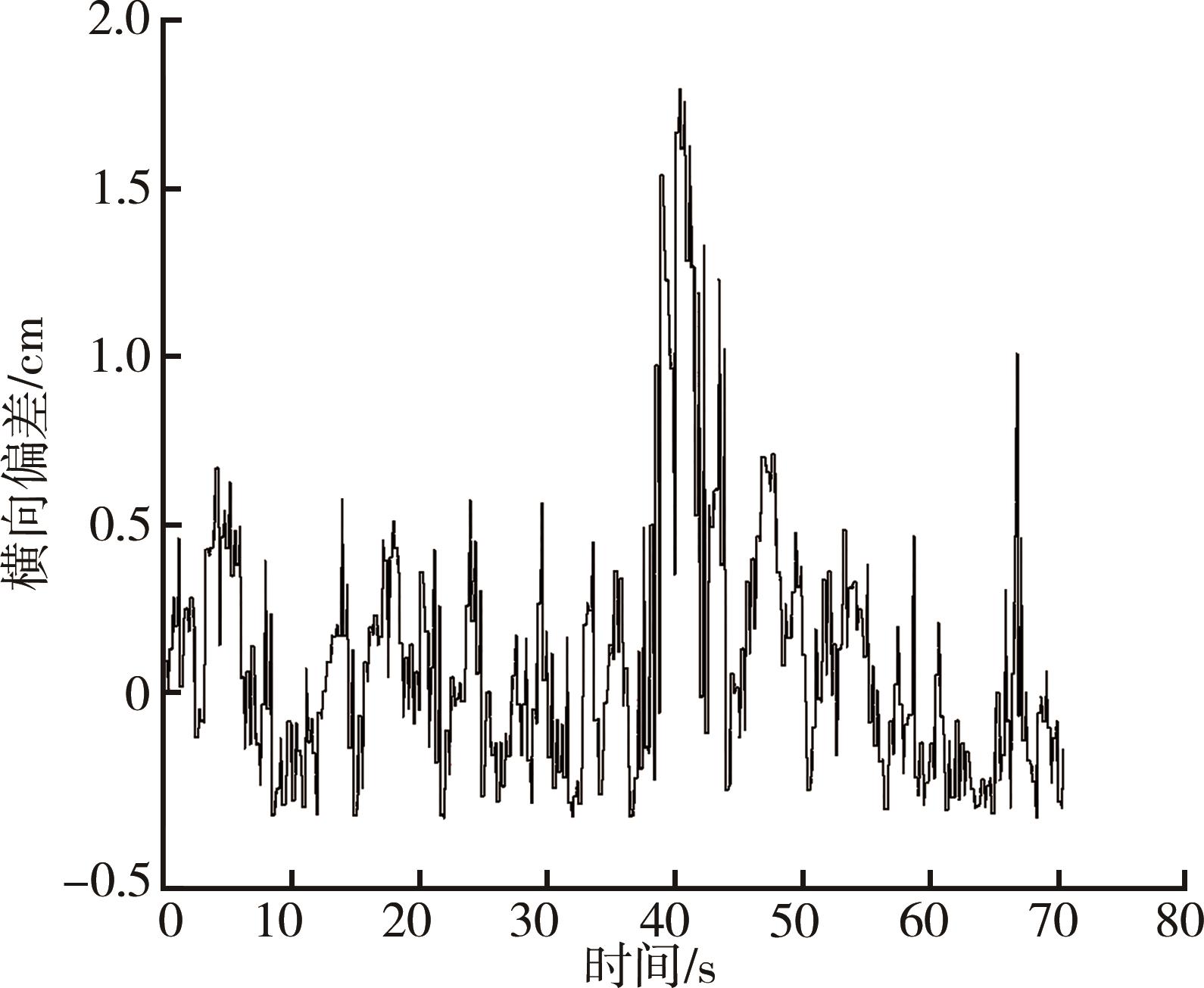
Figure 12 Transverse deviation diagram for asphalt pavement
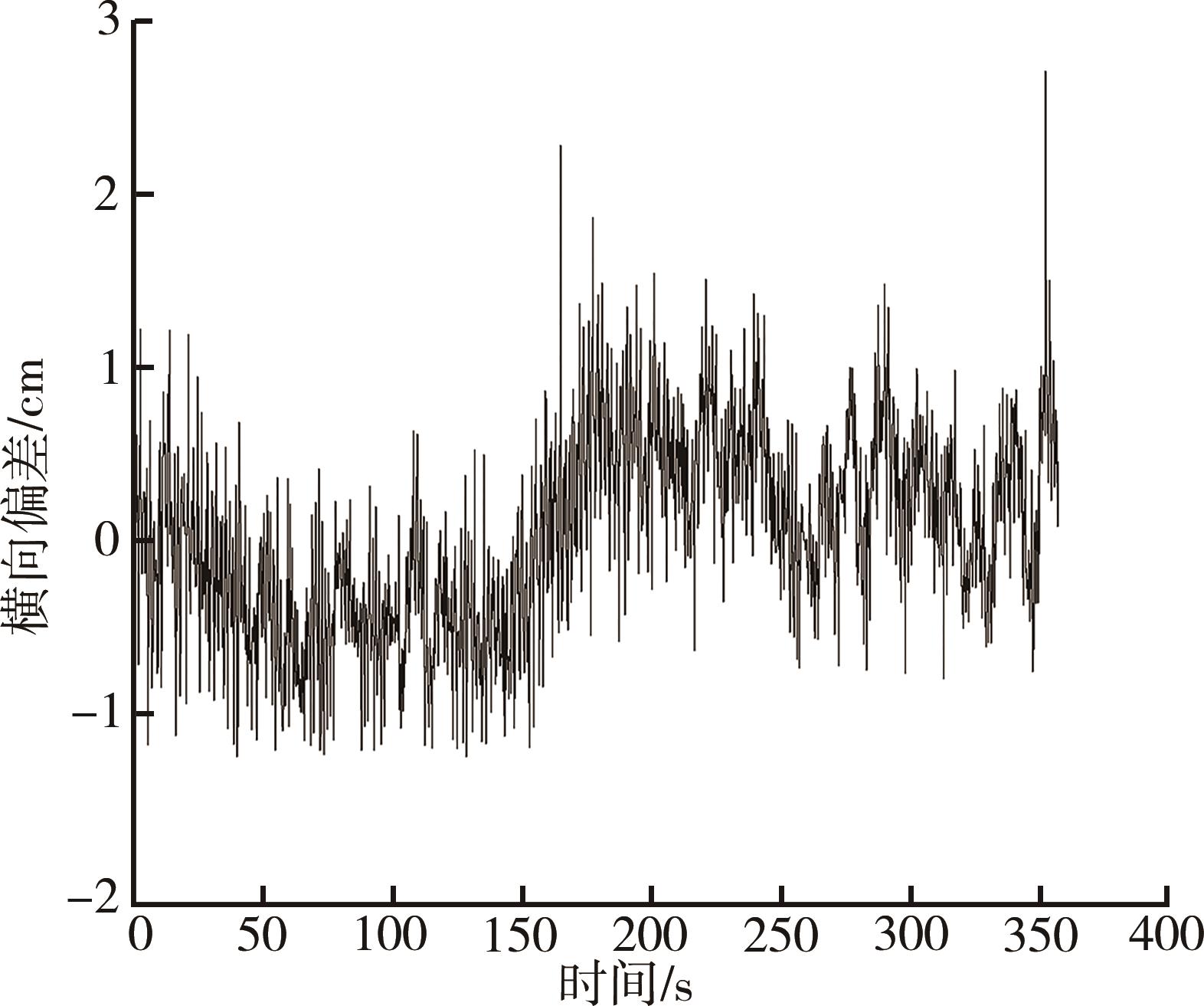
Figure 13 Horizontal deviation map of farmland environment
| 横向偏差均值/mm | 横向偏差标准差/mm | 横向偏差最大值/mm | 直线自动导航系统误差/mm | |
|---|---|---|---|---|
| 沥青地面 | 5.02 | 8.71 | 17.51 | 10.45 |
| 农田环境 | 10.87 | 12.98 | 18.52 | 21.07 |
Table 3 Deviation results for linear autopilot
| 横向偏差均值/mm | 横向偏差标准差/mm | 横向偏差最大值/mm | 直线自动导航系统误差/mm | |
|---|---|---|---|---|
| 沥青地面 | 5.02 | 8.71 | 17.51 | 10.45 |
| 农田环境 | 10.87 | 12.98 | 18.52 | 21.07 |
| 1 | 姚成胜, 滕毅, 黄琳. 中国粮食安全评价指标体系构建及实证分析[J]. 农业工程学报, 2015, 31(4): 1-10. |
| YAO Chengsheng, TENG Yi, HUANG Lin, et al. Evaluation index system construction and empirical analysis on food security in China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(4): 1-10. | |
| 2 | 郑旭媛, 徐志刚. 资源禀赋约束、要素替代与诱致性技术变迁——以中国粮食生产的机械化为例[J]. 经济学(季刊), 2017, 16(1): 45-66. |
| ZHEN Xuyuan, Zhigang XÜ. Endowment restriction, factor substitution and induced technological innovation: A case research on the grain producing mechanization in China [J]. China Economic Quarterly, 2017, 16(1): 45-66. | |
| 3 | 匡远配, 易梦丹. 精细农业推进现代农业发展: 机理分析和现实依据[J]. 农业现代化研究, 2018, 39(4): 551-558. |
| KUANG Yuanpei, YI Mengdan. Precision agriculture promoting the development of modern agriculture: Theoretical mechanism and practical evidence [J]. Research of Agricultural Modernization, 2018, 39(4): 551-558. | |
| 4 | 张漫, 季宇寒, 李世超, 等. 农业机械导航技术研究进展[J]. 农业机械学报, 2020, 51(4): 1-18. |
| ZHANG Man, JI Yuhan, LI Shichao, et al. Research progress of agricultural machinery navigation technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(4): 1-18. | |
| 5 | 王雷, 赖维军. 自动导航拖拉机在精准农业上的运用[J]. 河北农机, 2021(8): 27-28. |
| 6 | 白学峰, 常江雪, 滕兆丽, 等. 我国智能农业拖拉机关键技术研究进展[J]. 智能化农业装备学报(中英文), 2022, 3(2): 10-21. |
| BAI Xuefeng, CHANG Jingxue, TENG Zhaoli, et al. Research progress on key technologies of intelligent agricultural tractors in China [J]. Journal of Intelligent Agricultural Mechanization, 2022, 3(2): 10-21. | |
| 7 | 刘艳亮, 张海平, 徐彦田, 等. 全球卫星导航系统的现状与进展[J]. 导航定位学报, 2019, 7(1): 18-21, 27. |
| LIU Yanliang, ZHANG Haiping, XU Yantian, et al. Development status and trend of global navigation satellite system [J]. Journal of Navigation Positioning, 2019, 7(1):18-21, 27. | |
| 8 | BENGOCHEA-GUEVARA J M, CONESA-MUÑOZ J, ANDÚJAR D, et al. Merge fuzzy visual servoing and GPS-based planning to obtain a proper navigation behavior for a small crop-inspection robot [J]. Sensors, 2016, 16: 276. |
| 9 | KIM M, PARK C, YOON J. The design of GNSS/IMU loosely-coupled integration filter for wearable EPTS of football players [J]. Sensors, 2023, 23: 1749. |
| 10 | 李忠利, 刘小锋, 陈修魁, 等. 基于信息融合的拖拉机组合导航定位系统研究[J]. 农业机械学报, 2020, 51(8): 382-390, 399. |
| LI Zhongli, LIU Xiaofeng, CHEN Xiukui, et al. Tractor integrated navigation and positioning system based on data fusion [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020,51(08):382-390, 399. | |
| 11 | 钟银, 薛梦琦, 袁洪良. 智能农机GNSS/INS组合导航系统设计[J]. 农业工程学报, 2021, 37(9): 40-46. |
| ZHONG Yin, XUE Mengqi, YUAN Hongliang. Design of the GNSS/INS integrated navigation system for intelligent agricultural machinery [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 40-46. | |
| 12 | YIN X, NOGUCHI N. Development and evaluation of a general-purpose electric off-road robot based on agricultural navigation [J]. International Journal of Agricultural and Biological Engineering, 2014, 7(5): 14-21. |
| 13 | YANG Y, ZHANG G, CHEN Z Z, et al. An independent steering driving system to realize headland turning of unmanned tractors [J]. Computers and Electronics in Agriculture, 2022, 201: 107278. |
| 14 | 王艳鑫, 李加琪, 王显, 等. 轮式拖拉机转向角测量装置的研制与试验[J]. 中国农业大学学报, 2022, 27(1): 203-211. |
| WANG Yanxin, LI Jiaqi, WANG Xian, et al. Development and test of a steering angle measuring device for wheeled tractor [J]. Journal of Agricultural University, 2022, 27(1): 203-211. | |
| 15 | 何杰, 高维炜, 王辉, 等. 基于GNSS航向微分和MEMS陀螺仪的农机轮角测量方法[J]. 华南农业大学学报, 2020, 41(5): 91-98. |
| HE Jie, GAO Weiwei, WANG Hui, et al. Wheel steering angle measurement method of agricultural machinery based on GNSS heading differential and MEMS gyroscope [J]. Journal of South China Agricultural University, 2020, 41(5): 91-98. | |
| 16 | 陈云, 何艳. 基于GNSS姿态与电机编码器的农机转向角度测量系统研制[J]. 农业工程学报, 2021, 37(10): 10-17. |
| CHEN Yun, HE Yan. Development of agricultural machinery steering wheel angle measuring system based on GNSS attitude and motor encoder [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(10): 10-17. | |
| 17 | 高维炜. 基于GNSS和MEMS陀螺的拖拉机自动导航前轮转向角测量方法研究[D]. 广州: 华南农业大学, 2018. |
| Gao Weiwei. Research of steering angle measurement of front wheel based gnss and mems gyroscope used on automatic navigation of tractor [D]. Guangzhou: South China Agricultural University, 2018. | |
| 18 | 彭丁聪. 卡尔曼滤波的基本原理及应用[J]. 软件导刊, 2009, 8(11): 32-34. |
| PENG Dingcong. Pseudo-linear Kalman filter in passive target tracking [J]. Software Guide, 2009, 8(11): 32-34. | |
| 19 | 宋迎春. 动态定位中的卡尔曼滤波研究[D]. 长沙: 中南大学, 2008. |
| SONG Yingchun. Research on Klaman filter in kinematic positioning [D]. Changsha: Central South University, China, 2008. | |
| 20 | 蔡頔. GNSS/INS组合导航数据融合算法研究[D]. 南京: 南京信息工程大学, 2023. |
| CAI Di. Research on GNSS/INS integrated navigation data fusion algorithm [D]. Nanjing: Nanjing University of Information Science and Technology, 2023. | |
| 21 | 赵强, 范思远, 唐政林. 基于迭代扩展卡尔曼滤波的车辆运动状态估计[J]. 森林工程, 2021, 37(1):66-72, 79. |
| ZHAO Qiang, FAN Siyuan, TANG Zhenglin. Vehicle motion state estimation based on iterative extended Kalman filter [J]. Forest Engineering, 2021, 37(1): 66-72, 79. | |
| 22 | 孙连烛. 基于GNSS/INS的拖拉机导向轮偏转角度测量系统研究[D]. 昆明: 昆明理工大学, 2020. |
| SUN Lianzhu. Research on deflection angle measurement system of tractor guide wheel based on GNSS / INS [D]. Kunming: Kunming University of Science and Technology, 2020. |
| [1] | YU Qiang, LI Xueyan, PAN Xinjia, HE Xionglin, FAN Wentao, WANG Fang, WANG Yu. Research on the energy control optimized strategy of electric tractor composite power supply based on improved genetic algorithm [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 14-23. |
| [2] | CUI Xinyu, CUI Bingbo, MA Zhen, HAN Yi, ZHANG Jianxin, WEI Xinhua. Integration of geometric-based path tracking controller and its application in agricultural machinery automatic navigation [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 24-31. |
| [3] | Bai Xuefeng, Chang Jiangxue, Teng Zhaoli, Lu Zhixiong. Research progress on key technologies of intelligent agricultural tractors in China [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(2): 10-21. |
| [4] | Zhang Lei, Liu Yiting, Chen Guangming, Li Peijuan. Research on navigation and rectification of inspection robot based on ultrasonic sensor [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(2): 64-70. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||