| 1 |
白学峰, 常江雪, 滕兆丽, 等. 我国智能农业拖拉机关键技术研究进展[J]. 智能化农业装备学报(中英文), 2022, 3(2): 10-21.
|
|
BAI Xuefeng, CHANG Jiangxue, TENG Zhaoli, et al. Research progress on key technologies of intelligent agricultural tractors in China [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(2): 10-21.
|
| 2 |
张隆梅, 刘岗微, 齐彦栋, 等. 农业机械无人驾驶系统关键技术研究进展(英文)[J]. 智能化农业装备学报(中英文), 2022, 3(1): 27-36.
|
|
ZHANG Longmei, LIU Gangwei, QI Yandong, et al. Research progress on key technologies of agricultural machinery unmanned driving system [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(1): 27-36
|
| 3 |
谢斌, 武仲斌, 毛恩荣. 农业拖拉机关键技术发展现状与展望[J]. 农业机械学报, 2018, 49(8): 1-17.
|
|
XIE Bin, WU Zhongbin, MAO Enrong. Development and prospect of key technologies on agricultural tractor [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 1-17.
|
| 4 |
ZHAO Jingjuan, YANG Yanping, ZHENG Huaiguo, et al. Global agricultural robotics research and development trend forecasts [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2021, 2(1): 28-35.
|
| 5 |
张漫, 季宇寒, 李世超, 等. 农业机械导航技术研究进展[J]. 农业机械学报, 2020, 51(4): 1-18.
|
|
ZHANG Man, JI Yuhan, LI Shichao, et al. Research progress of agricultural machinery navigation technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(4): 1-18.
|
| 6 |
崔冰波, 魏新华, 吴抒航, 等. 基于动态路径搜索的农机自动驾驶软件系统研制[J]. 农机化研究, 2022, 44(10): 228-232.
|
|
CUI Bingbo, WEI Xinhua, WU Shuhang, et al. Development of agricultural machinery self-driving software system based on dynamic path search [J]. Journal of Agricultural Mechanization Research, 2022, 44(10): 228-232.
|
| 7 |
熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10): 127-143.
|
|
XIONG Lu, YANG Xing, ZHUO Guirong, et al. Review on motion control of autonomous vehicles [J]. Journal of Mechanical Engineering, 2020, 56(10): 127-143.
|
| 8 |
李逃昌, 胡静涛, 高雷, 等. 一种与行驶速度无关的农机路径跟踪方法[J]. 农业机械学报, 2014, 45(2): 59-65.
|
|
LI Taochang, HU Jingtao, GAO Lei, et al. Agricultural machine path tracking method irrelevant to travel speeds [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(2): 59-65.
|
| 9 |
胡静涛, 高雷, 白晓平, 等. 农业机械自动导航技术研究进展[J]. 农业工程学报, 2015, 31(10): 1-10.
|
|
HU Jingtao, GAO Lei, BAI Xiaoping, et al. Review of research on automatic guidance of agricultural vehicles [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(10): 1-10.
|
| 10 |
TANG X H, PEI Z, YIN S, et al. Practical design and implementation of an autonomous surface vessel prototype: navigation and control [J]. International Journal of Advanced Robotic Systems, 2020: 1-14.
|
| 11 |
YAO L J, PITLA S K, ZHAO C, et al. An improved fuzzy logic control method for path tracking of an autonomous vehicle [J]. Transactions of the ASABE, 2020, 63(6): 1895-1904.
|
| 12 |
张华强, 王国栋, 吕云飞, 等. 基于改进纯追踪模型的农机路径跟踪算法研究[J]. 农业机械学报, 2020, 51(9):18-25.
|
|
ZHANG Huaqiang, WANG Guodong, LU Yunfei, et al. Agricultural machinery automatic navigation control system based on improved pure tracking model [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 18-25.
|
| 13 |
WANG R, LI Y, FAN J, et al. A novel pure pursuit algorithm for autonomous vehicles based on salp swarm algorithm and velocity controller [J]. IEEE Access, 2020, 8: 166525-166540.
|
| 14 |
姚立健, Pitla Santosh K, 杨自栋, 等. 基于超宽带无线定位的农业设施内移动平台路径跟踪研究[J]. 农业工程学报, 2019, 35(2): 17-24.
|
|
YAO Lijian, Pitla SANTOSH K, YANG Zidong, et al. Path tracking of mobile platform in agricultural facilities based on ultra wideband wireless positioning [J]. Transactions of the CSAE, 2019, 35(2): 17-24.
|
| 15 |
COULTER R C. Implementation of the pure pursuit path tracking algorithm [R]. Carnegie Mellon University, Pittsburgh, Pennsylvania, 1992.
|
| 16 |
肖世德, 江海锋, 杜金兰, 等. 基于两阶段纯追踪模型的农用车辆路径跟踪算法研究[J]. 农业机械学报, 2023, 54(4): 439-446.
|
|
XIAO Shide, JIANG Haifeng, DU Jinlan, et al Path tracking algorithm of agricultural vehicle based on two stages pure tracking model [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(2): 59-65.
|
| 17 |
WANG L, LIU M. Path tracking control for autonomous harvesting robots based on improved double arc path planning algorithm [J]. Journal of Intelligent & Robotic Systems, 2020, 100(3-4): 899-909.
|
| 18 |
THRUN S, MONTEMERLO M, DAHLKAMP H, et al. Stanley: The robot that won the DARPA grand challenge [J]. Journal of Field Robotics, 2006, 23(9): 661-692.
|
| 19 |
崔冰波, 孙宇, 吉峰, 等. 基于模糊Stanley模型的农机全田块路径跟踪算法研究[J]. 农业机械学报, 2022, 53(12): 43-48, 88.
|
|
CUI Bingbo, SUN Yu, JI Feng, et al. Study on whole field path tracking of agricultural machinery based on fuzzy Stanley model [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(12): 43-48.
|
| 20 |
王晟睿. 基于改进鲸鱼优化算法的Stanley算法研究[D]. 长春: 吉林大学,2022.
|
|
WANG Shengrui. Research on Stanley algorithm based on improved whale optimization algorithm [D]. Changchun: Jilin University, 2022.
|
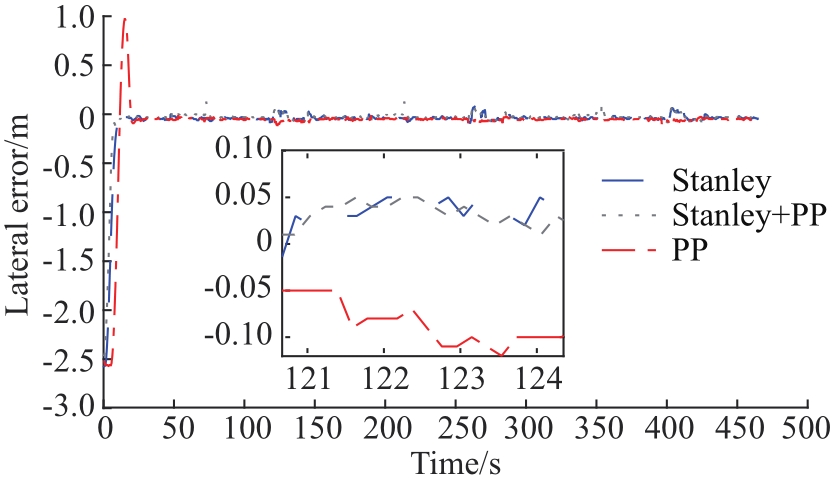
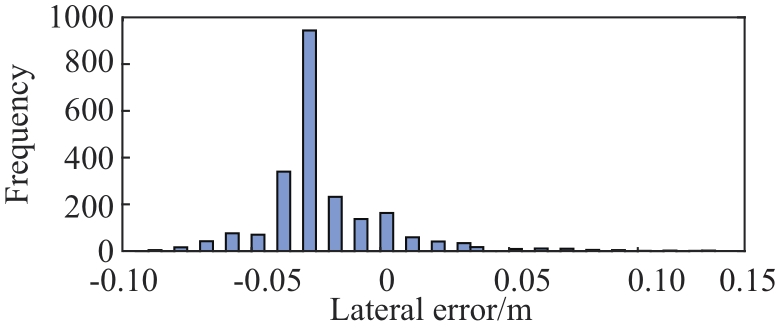
 ), CUI Bingbo1,2(
), CUI Bingbo1,2(