ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2025, Vol. 6 ›› Issue (1): 15-24.DOI: 10.12398/j.issn.2096-7217.2025.01.002
Previous Articles Next Articles
WANG Yongjian1,2( ), DING Xiang1,2, LI Hua1,2(), SAMUEL Mbugua Nyambura1,2, LI Yuqing1,2, GE Yanyan1,2, QIU Shilong1,2, FENG Xuebin1,2
), DING Xiang1,2, LI Hua1,2(), SAMUEL Mbugua Nyambura1,2, LI Yuqing1,2, GE Yanyan1,2, QIU Shilong1,2, FENG Xuebin1,2
Received:2024-04-30
Revised:2024-06-21
Online:2025-02-15
Published:2025-02-15
Corresponding author:
LI Hua
About author:WANG Yongjian,E-mail: yjwang@njau.edu.cn
Supported by:CLC Number:
WANG Yongjian, DING Xiang, LI Hua, SAMUEL Mbugua Nyambura, LI Yuqing, GE Yanyan, QIU Shilong, FENG Xuebin. Design and experiment of STM32-based monitoring system for garlic combine harvester[J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 15-24.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2025.01.002
Figure 1 Schematic diagram of heading angle threshold determination
| 取样区域 | 最大值/g | 最小值/g | 平均值/g | 标准差/g |
|---|---|---|---|---|
| DS.NO.1 | 201.35 | 81.46 | 130.47 | 3.83 |
| DS.NO.2 | 198.87 | 90.43 | 138.36 | 4.04 |
| DS.NO.3 | 188.62 | 97.66 | 132.88 | 2.16 |
| DS.NO.4 | 203.64 | 84.72 | 133.45 | 3.14 |
| DS.NO.5 | 192.57 | 94.44 | 134.03 | 1.57 |
Table 1 Garlic single grain weight
| 取样区域 | 最大值/g | 最小值/g | 平均值/g | 标准差/g |
|---|---|---|---|---|
| DS.NO.1 | 201.35 | 81.46 | 130.47 | 3.83 |
| DS.NO.2 | 198.87 | 90.43 | 138.36 | 4.04 |
| DS.NO.3 | 188.62 | 97.66 | 132.88 | 2.16 |
| DS.NO.4 | 203.64 | 84.72 | 133.45 | 3.14 |
| DS.NO.5 | 192.57 | 94.44 | 134.03 | 1.57 |
Figure 2 Diagram of the structure of the monitoring system for garlic harvesters
Figure 3 Garlic harvester hardware installation diagram
| 硬件选择 | 核心器件 | 安装位置 | 作用 |
|---|---|---|---|
| 控制器 | STM32F103RCT6 | 收获机隔板背面 | 处理各模块信号,与设定参数阈值对比判断相关工作部件是否发生故障 |
| 对行辅助模块 | MPU6050传感器 | 收获机前端 | 实时采集收获机前进过程中的航向信息 |
| 产量监测模块 | E18-D80NK型光电传感器 | 收获机夹持输送装置 | 对收获的大蒜个数进行计数 |
| 故障诊断模块 | NJK-5001C型霍尔传感器 | 夹持输送装置的从动轮上方0~10 mm处 | 监测从动轮转速 |
| 语音模块 | WT588D-U | 收获机隔板背面 | 语音播报故障情况 |
Table 2 Hardware selection chart
| 硬件选择 | 核心器件 | 安装位置 | 作用 |
|---|---|---|---|
| 控制器 | STM32F103RCT6 | 收获机隔板背面 | 处理各模块信号,与设定参数阈值对比判断相关工作部件是否发生故障 |
| 对行辅助模块 | MPU6050传感器 | 收获机前端 | 实时采集收获机前进过程中的航向信息 |
| 产量监测模块 | E18-D80NK型光电传感器 | 收获机夹持输送装置 | 对收获的大蒜个数进行计数 |
| 故障诊断模块 | NJK-5001C型霍尔传感器 | 夹持输送装置的从动轮上方0~10 mm处 | 监测从动轮转速 |
| 语音模块 | WT588D-U | 收获机隔板背面 | 语音播报故障情况 |
Figure 4 Upper computer main interface
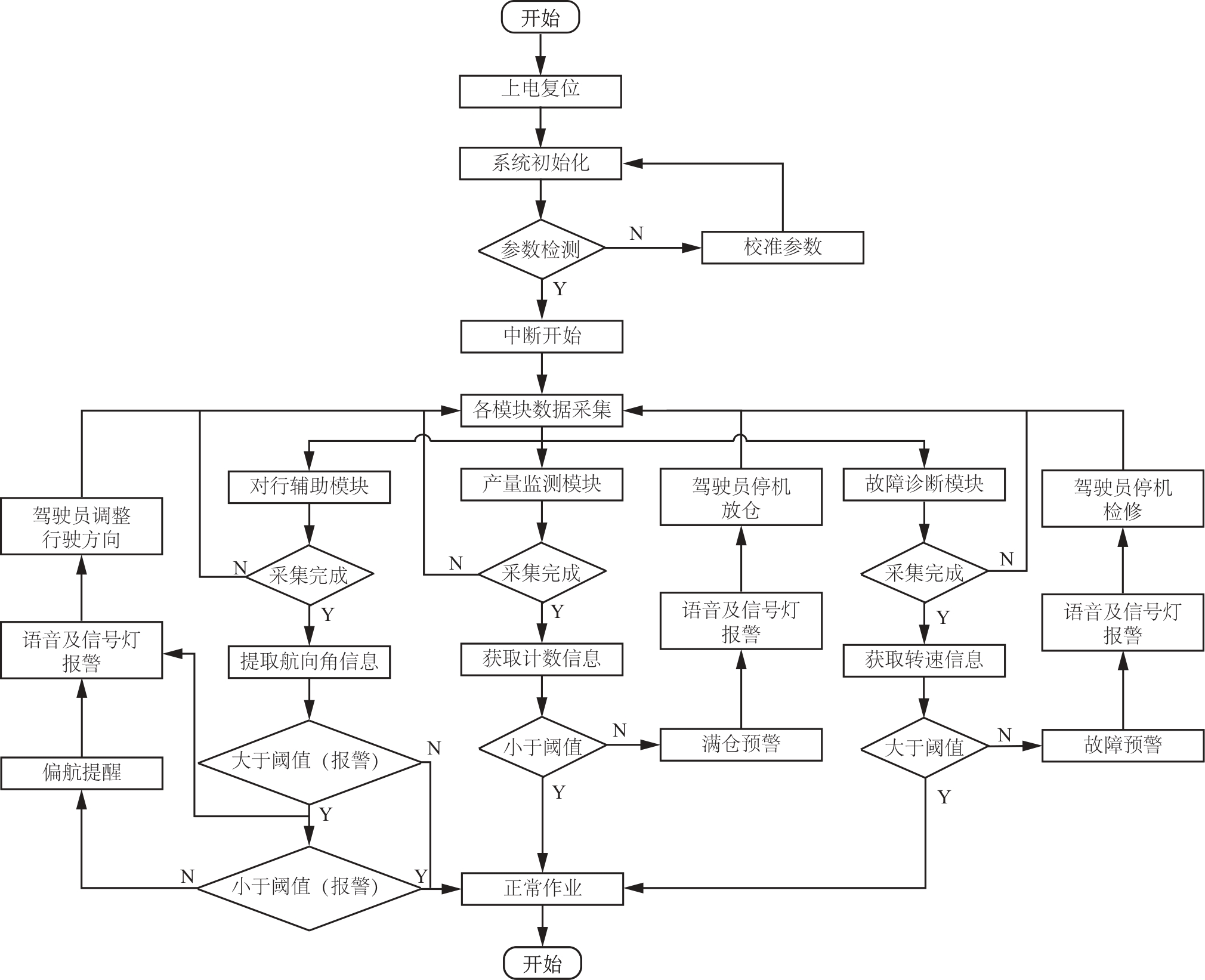
Figure 5 Main control program flow chart

Figure 6 MPU6050 test schematic
| 编号 | 度量角度 /(°) | 实测角度 /(°) | 误差值 /(°) |
|---|---|---|---|
| 1 | 5.0 | 4.7 | 0.3 |
| 2 | 15.0 | 14.4 | 0.6 |
| 3 | 30.0 | 28.8 | 0.2 |
| 4 | 45.0 | 44.7 | 0.3 |
| 5 | 60.0 | 59.8 | 0.2 |
| 6 | 90.0 | 88.7 | 1.3 |
| 7 | 115.0 | 114.7 | 0.3 |
| 8 | 135.0 | 134.1 | 0.9 |
| 9 | 150.0 | 149.7 | 0.3 |
| 10 | 175.0 | 174.8 | 0.2 |
Table 3 Test data of line auxiliary module
| 编号 | 度量角度 /(°) | 实测角度 /(°) | 误差值 /(°) |
|---|---|---|---|
| 1 | 5.0 | 4.7 | 0.3 |
| 2 | 15.0 | 14.4 | 0.6 |
| 3 | 30.0 | 28.8 | 0.2 |
| 4 | 45.0 | 44.7 | 0.3 |
| 5 | 60.0 | 59.8 | 0.2 |
| 6 | 90.0 | 88.7 | 1.3 |
| 7 | 115.0 | 114.7 | 0.3 |
| 8 | 135.0 | 134.1 | 0.9 |
| 9 | 150.0 | 149.7 | 0.3 |
| 10 | 175.0 | 174.8 | 0.2 |
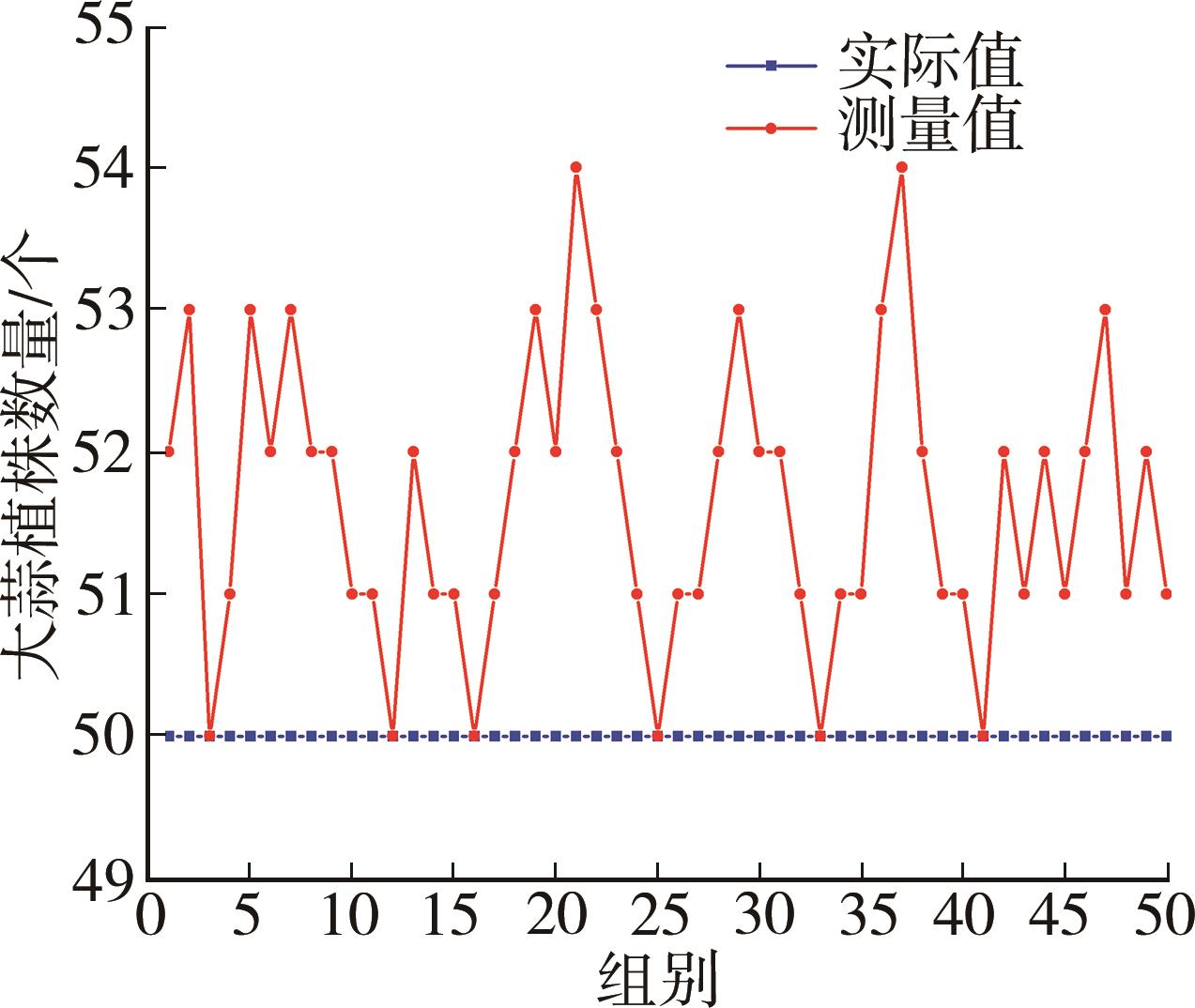
Figure 7 Yield monitoring module test error plot
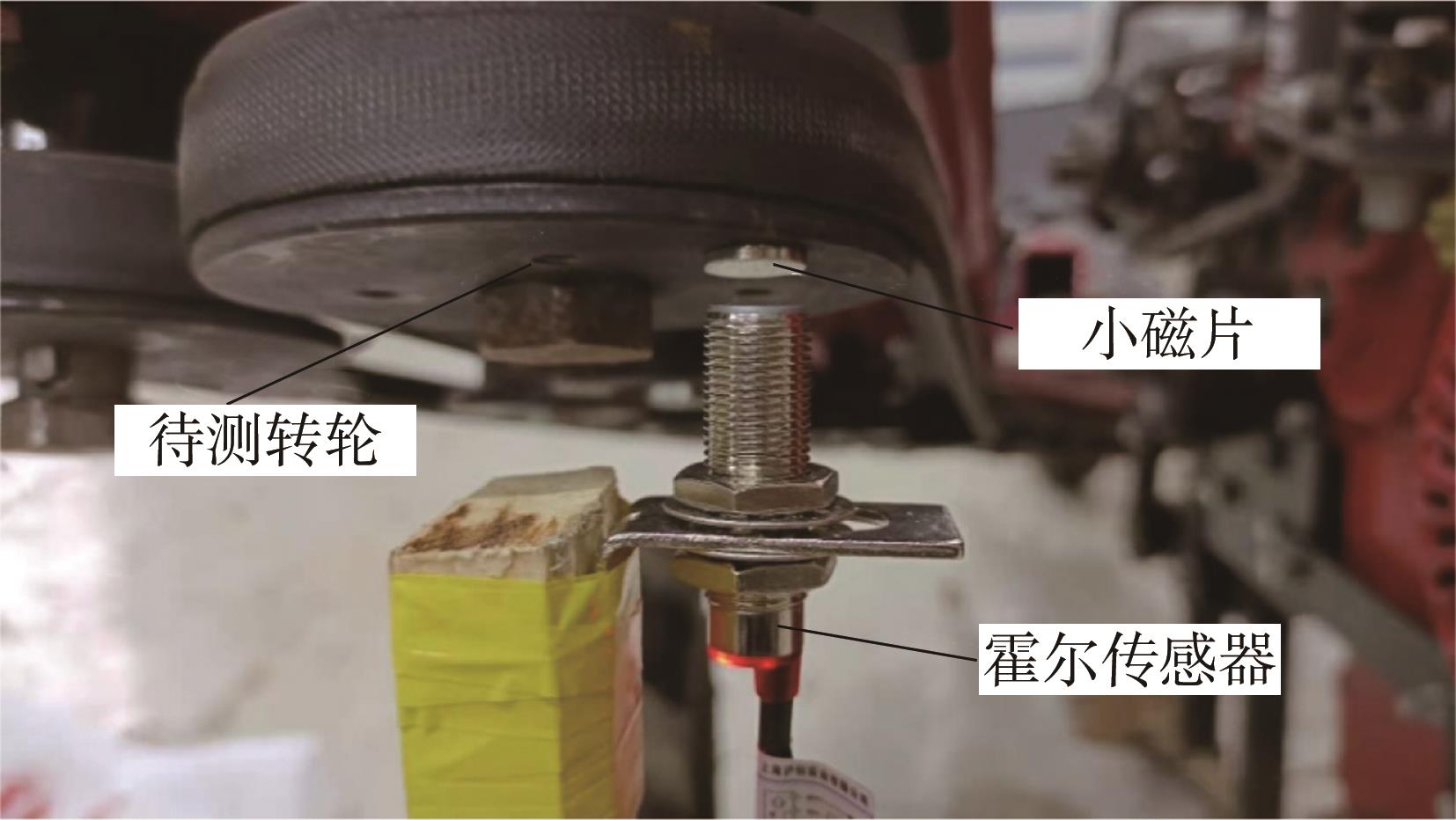
Figure 8 Hall sensor test schematic
| 组别 | 时间节点/min | 测速仪所测转速/(r·min-1) | 故障诊断模块所测转速/(r·min-1) | 误差/(r·min-1) |
|---|---|---|---|---|
| 1 | 0.5 | 187 | 189 | 2 |
| 2 | 1.0 | 182 | 187 | 5 |
| 3 | 1.5 | 184 | 187 | 3 |
| 4 | 2.0 | 181 | 183 | 2 |
| 5 | 2.5 | 185 | 191 | 6 |
| 6 | 3.0 | 187 | 188 | 1 |
| 7 | 3.5 | 187 | 184 | 3 |
| 8 | 4.0 | 179 | 181 | 2 |
| 9 | 4.5 | 185 | 186 | 1 |
| 10 | 5.0 | 187 | 189 | 2 |
| 11 | 5.5 | 181 | 183 | 2 |
| 12 | 6.0 | 181 | 186 | 5 |
| 13 | 6.5 | 183 | 190 | 7 |
| 14 | 7.0 | 182 | 184 | 2 |
| 15 | 7.5 | 182 | 184 | 2 |
| 16 | 8.0 | 180 | 181 | 1 |
| 17 | 8.5 | 181 | 183 | 2 |
| 18 | 9.0 | 183 | 189 | 6 |
| 19 | 9.5 | 183 | 185 | 2 |
| 20 | 10.0 | 181 | 182 | 1 |
Table 4 Fault diagnostic module speed test data
| 组别 | 时间节点/min | 测速仪所测转速/(r·min-1) | 故障诊断模块所测转速/(r·min-1) | 误差/(r·min-1) |
|---|---|---|---|---|
| 1 | 0.5 | 187 | 189 | 2 |
| 2 | 1.0 | 182 | 187 | 5 |
| 3 | 1.5 | 184 | 187 | 3 |
| 4 | 2.0 | 181 | 183 | 2 |
| 5 | 2.5 | 185 | 191 | 6 |
| 6 | 3.0 | 187 | 188 | 1 |
| 7 | 3.5 | 187 | 184 | 3 |
| 8 | 4.0 | 179 | 181 | 2 |
| 9 | 4.5 | 185 | 186 | 1 |
| 10 | 5.0 | 187 | 189 | 2 |
| 11 | 5.5 | 181 | 183 | 2 |
| 12 | 6.0 | 181 | 186 | 5 |
| 13 | 6.5 | 183 | 190 | 7 |
| 14 | 7.0 | 182 | 184 | 2 |
| 15 | 7.5 | 182 | 184 | 2 |
| 16 | 8.0 | 180 | 181 | 1 |
| 17 | 8.5 | 181 | 183 | 2 |
| 18 | 9.0 | 183 | 189 | 6 |
| 19 | 9.5 | 183 | 185 | 2 |
| 20 | 10.0 | 181 | 182 | 1 |
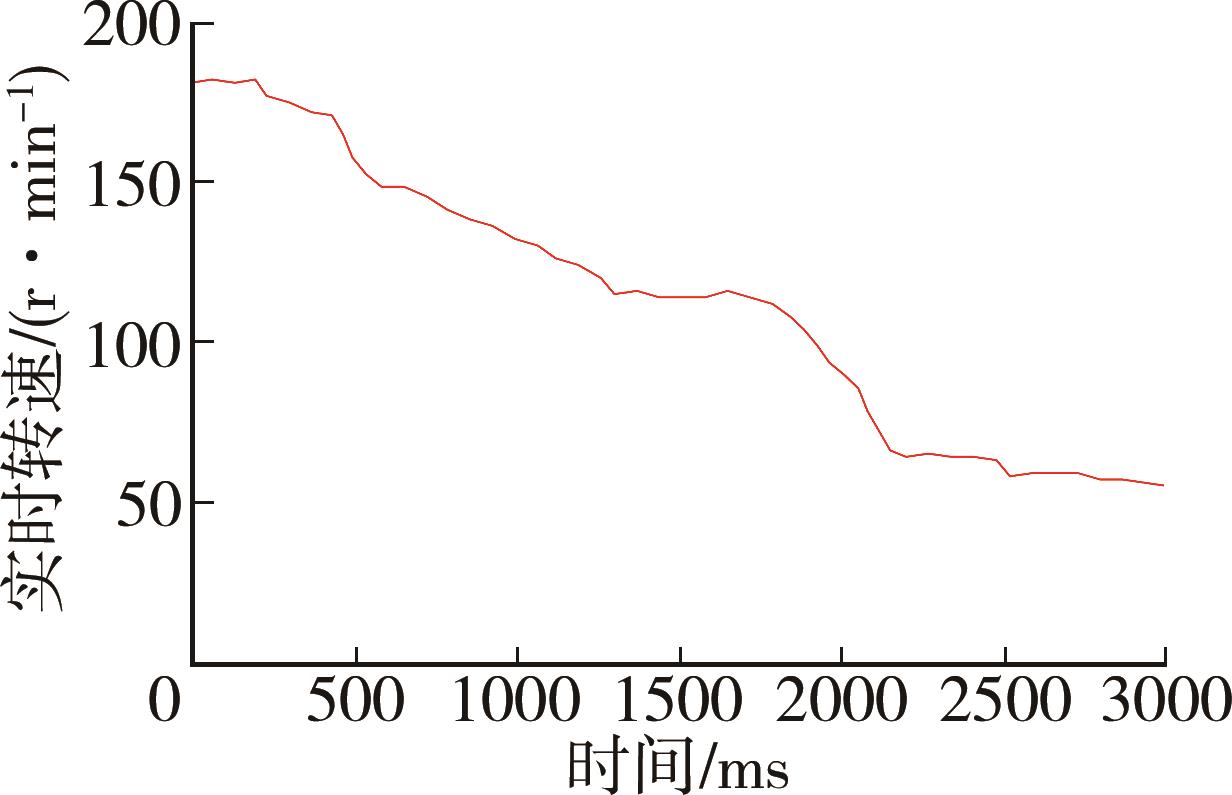
Figure 9 Speed test of the fault simulation
| 编号 | 测试模块 | 测试数值/个 | 是否达到报警阈值 | 是否语音播报 | 是否为设定报警音 |
|---|---|---|---|---|---|
| 1 | 对行辅助模块 | 4.7 | 否 | 否 | / |
| 2 | 对行辅助模块 | 15.6 | 是 | 是 | 是 |
| 3 | 对行辅助模块 | 30.2 | 是 | 是 | 是 |
| 4 | 对行辅助模块 | 44.7 | 是 | 是 | 是 |
| 5 | 对行辅助模块 | 59.8 | 是 | 是 | 是 |
| 6 | 产量监测模块 | 20 | 否 | 否 | / |
| 7 | 产量监测模块 | 340 | 否 | 否 | / |
| 8 | 产量监测模块 | 650 | 否 | 否 | / |
| 9 | 产量监测模块 | 800 | 否 | 否 | / |
| 10 | 产量监测模块 | 1 010 | 是 | 是 | 是 |
| 11 | 故障诊断模块 | 0 | 是 | 是 | 是 |
| 12 | 故障诊断模块 | 56 | 是 | 是 | 是 |
| 13 | 故障诊断模块 | 187 | 否 | 否 | / |
| 14 | 故障诊断模块 | 192 | 否 | 否 | / |
| 15 | 故障诊断模块 | 185 | 否 | 否 | / |
Table 5 WT588D-U voice announcement module test data
| 编号 | 测试模块 | 测试数值/个 | 是否达到报警阈值 | 是否语音播报 | 是否为设定报警音 |
|---|---|---|---|---|---|
| 1 | 对行辅助模块 | 4.7 | 否 | 否 | / |
| 2 | 对行辅助模块 | 15.6 | 是 | 是 | 是 |
| 3 | 对行辅助模块 | 30.2 | 是 | 是 | 是 |
| 4 | 对行辅助模块 | 44.7 | 是 | 是 | 是 |
| 5 | 对行辅助模块 | 59.8 | 是 | 是 | 是 |
| 6 | 产量监测模块 | 20 | 否 | 否 | / |
| 7 | 产量监测模块 | 340 | 否 | 否 | / |
| 8 | 产量监测模块 | 650 | 否 | 否 | / |
| 9 | 产量监测模块 | 800 | 否 | 否 | / |
| 10 | 产量监测模块 | 1 010 | 是 | 是 | 是 |
| 11 | 故障诊断模块 | 0 | 是 | 是 | 是 |
| 12 | 故障诊断模块 | 56 | 是 | 是 | 是 |
| 13 | 故障诊断模块 | 187 | 否 | 否 | / |
| 14 | 故障诊断模块 | 192 | 否 | 否 | / |
| 15 | 故障诊断模块 | 185 | 否 | 否 | / |

Figure 10 Preparation for field trial entry
| 编号 | 偏航角度/(°) | 指示灯颜色 | 扬声器播报声音 |
|---|---|---|---|
| 1 | 0.7 | 绿色 | 无 |
| 2 | 3.6 | 绿色 | 无 |
| 3 | 9.8 | 黄色 | 无 |
| 4 | 11.3 | 红色 | 已偏航,请调整! |
| 5 | 14.6 | 红色 | 已偏航,请调整! |
| 6 | 15.8 | 红色 | 已偏航,请调整! |
| 7 | 23.5 | 红色 | 已偏航,请调整! |
| 8 | 36.3 | 红色 | 已偏航,请调整! |
| 9 | 40.1 | 红色 | 已偏航,请调整! |
Table 6 Test results of the alarm function of the line-assist module
| 编号 | 偏航角度/(°) | 指示灯颜色 | 扬声器播报声音 |
|---|---|---|---|
| 1 | 0.7 | 绿色 | 无 |
| 2 | 3.6 | 绿色 | 无 |
| 3 | 9.8 | 黄色 | 无 |
| 4 | 11.3 | 红色 | 已偏航,请调整! |
| 5 | 14.6 | 红色 | 已偏航,请调整! |
| 6 | 15.8 | 红色 | 已偏航,请调整! |
| 7 | 23.5 | 红色 | 已偏航,请调整! |
| 8 | 36.3 | 红色 | 已偏航,请调整! |
| 9 | 40.1 | 红色 | 已偏航,请调整! |
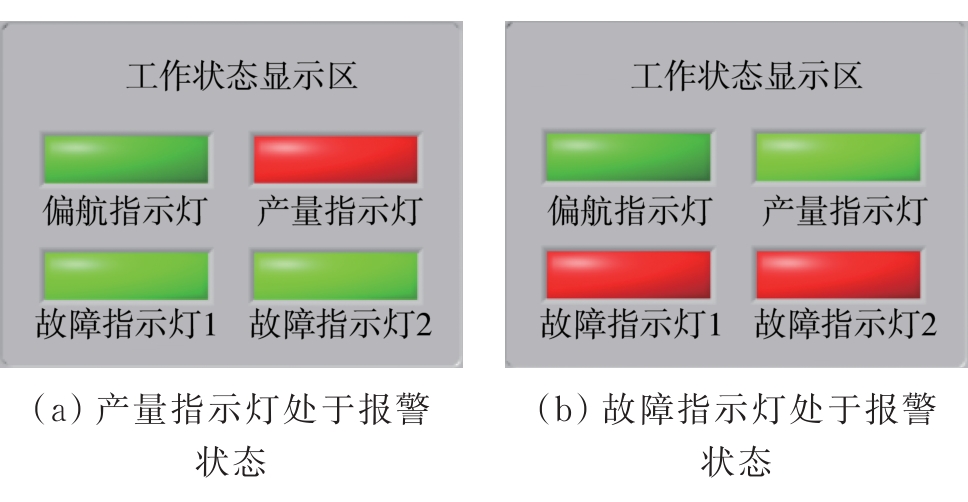
Figure 11 Indicator status diagram of the upper computer
| 时间 | 对行辅助模块 | 产量监测模块 | 故障诊断模块 | 语音播报模块 |
|---|---|---|---|---|
| 8:00 | 正常 | 正常 | 正常 | 正常 |
| 9:00 | 正常 | 正常 | 正常 | 正常 |
| 10:00 | 正常 | 正常 | 正常 | 正常 |
| 11:00 | 正常 | 正常 | 正常 | 正常 |
| 13:00 | 正常 | 正常 | 正常 | 正常 |
| 14:00 | 正常 | 正常 | 正常 | 正常 |
| 15:00 | 正常 | 正常 | 正常 | 正常 |
| 16:00 | 正常 | 正常 | 正常 | 正常 |
| 17:00 | 正常 | 正常 | 正常 | 正常 |
Table 7 System stability test results record sheet
| 时间 | 对行辅助模块 | 产量监测模块 | 故障诊断模块 | 语音播报模块 |
|---|---|---|---|---|
| 8:00 | 正常 | 正常 | 正常 | 正常 |
| 9:00 | 正常 | 正常 | 正常 | 正常 |
| 10:00 | 正常 | 正常 | 正常 | 正常 |
| 11:00 | 正常 | 正常 | 正常 | 正常 |
| 13:00 | 正常 | 正常 | 正常 | 正常 |
| 14:00 | 正常 | 正常 | 正常 | 正常 |
| 15:00 | 正常 | 正常 | 正常 | 正常 |
| 16:00 | 正常 | 正常 | 正常 | 正常 |
| 17:00 | 正常 | 正常 | 正常 | 正常 |
| 1 | 王旭, 马越, 赵晓燕, 等. 不同颜色大蒜品质分析[J]. 食品工业, 2021, 42(2): 183-186. |
| WANG Xu, MA Yue, ZHAO Xiaoyan, et al. Storage quality analysis of garlic with different colors [J]. The Food Industry, 2021, 42(2): 183-186. | |
| 2 | 赵玉峰, 周梅芝. 徐州地区大蒜栽培技术[J]. 现代化农业, 2020(11): 32-33. |
| 3 | 胡志超, 吴峰, 王海鸥, 等. 国内外大蒜收获机械现状[J]. 农业机械, 2007(12): 47-49. |
| 4 | DE SILVA R, CIELNIAK G, GAO J F. Vision based crop row navigation under varying field conditions in arable fields [J]. Computers and Electronics in Agriculture, 2024, 217: 108581. |
| 5 | 韩长杰, 郑康, 赵学观, 等. 大田甘蓝作物行识别与对行喷雾控制系统设计与试验[J]. 农业机械学报, 2022, 53(6): 89-101. |
| HAN Changjie, ZHENG Kang, ZHAO Xueguan, et al. Design and experiment of row identification and row-oriented spray control system for field cabbage crops [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(6): 89-101. | |
| 6 | 王侨, 孟志军, 付卫强, 等. 基于机器视觉的玉米苗期多条作物行线检测算法[J]. 农业机械学报, 2021, 52(4): 208-220. |
| WANG Qiao, MENG Zhijun, FU Weiqiang, et al. Detection algorithm of multiple crop row lines based on machine vision in maize seedling stage [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(4): 208-220. | |
| 7 | 张凯良, 胡勇, 杨丽, 等. 玉米收获机自动对行系统设计与试验[J]. 农业机械学报, 2020, 51(2): 103-114. |
| ZHANG Kailiang, HU Yong, YANG Li, et al. Design and experiment of auto-follow row system for corn harvester [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(2): 103-114. | |
| 8 | 李涛, 周进, 徐文艺, 等. 根茎类作物收获机自动对行系统设计与试验[J]. 农业机械学报, 2019, 50(11): 102-110. |
| LI Tao, ZHOU Jin, XU Wenyi, et al. Design and test of auto-follow row system employed in root and stem crops harvester [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(11): 102-110. | |
| 9 | 张晋国, 郑超, 赵金, 等. 棉花打顶机自动对行装置设计与试验[J]. 农业机械学报, 2021, 52(7): 93-101. |
| ZHANG Jinguo, ZHENG Chao, ZHAO Jin, et al. Design and experiment of auto-follow row device for cotton topping machine [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(7): 93-101. | |
| 10 | LIN S M, JIANG Y, CHEN X S, et al. Automatic detection of plant rows for a transplanter in paddy field using faster R-CNN [J]. IEEE Access, 2020, 8: 147231-147240. |
| 11 | 陈学深, 熊悦淞, 齐龙, 等. 基于触感引导的小型水田行进底盘自动对行方法[J]. 农业工程学报, 2022, 38(21): 8-15. |
| CHEN Xueshen, XIONG Yuesong, QI Long, et al. Design and experiment of the tactile guidance system for the automatic alignment of small paddy moving chassis [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(21): 8-15. | |
| 12 | YANG Y, ZHOU Y, YUE X, et al. Real-time detection of crop rows in maize fields based on autonomous extraction of ROI [J]. Expert Systems with Applications, 2023, 213: 118826. |
| 13 | 马鑫, 王熙, 王新忠, 等. 基于微波的产量监测传感器设计与试验[J]. 农机化研究, 2022, 44(12): 163-169. |
| MA Xin, WANG Xi, WANG Xinzhong, et al. Design and test of yield monitoring sensor based on microwave [J]. Journal of Agricultural Mechanization Research, 2022, 44(12): 163-169. | |
| 14 | 耿端阳, 谭德蕾, 苏国粱, 等. 压力式谷物产量监测系统优化与试验验证[J]. 农业工程学报, 2021, 37(9): 245-252. |
| GENG Duanyang, TAN Delei, SU Guoliang, et al. Optimization and experimental verification of grain yield monitoring system based on pressure sensors [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 245-252. | |
| 15 | BIDESE-PUHL R, BUTTS C L, REWIS M, et al. An mmWave radar-based mass flow sensor using machine learning towards a peanut yield monitor [J]. Computers and Electronics in Agriculture, 2023, 215: 108340. |
| 16 | SUN Y F, LIU R J, ZHANG M, et al. Design of feed rate monitoring system and estimation method for yield distribution information on combine harvester [J]. Computers and Electronics in Agriculture, 2022, 201: 107322. |
| 17 | LIU R J, SUN Y F, LI M Z, et al. Development and application experiments of a grain yield monitoring system [J]. Computers and Electronics in Agriculture, 2022, 195: 106851. |
| 18 | MA Z, JIANG S, LI Y M, et al. Recognition methods of threshing load conditions based on machine learning algorithms [J]. Computers and Electronics in Agriculture, 2022, 200: 107250. |
| 19 | 徐文龙. 电子技术在谷物联合收割机上的应用[J]. 南方农机, 2020, 51(20): 33-34. |
| 20 | 冯映, 聂一洲, 高刚毅. 农业机械故障诊断技术研究现状及展望[J]. 南方农机, 2020, 51(7): 51, 53. |
| 21 | 李宁. 基于大数据的农业机械设备运行状态远程监测方法[J]. 现代制造技术与装备, 2023, 59(1): 176-178. |
| LI Ning. Remote monitoring method of agricultural machinery operation state based on big data [J]. Modern Manufacturing Technology and Equipment, 2023, 59(1): 176-178. | |
| 22 | 高霞. 基于改进SOM神经网络的农机液压系统故障诊断方法[J]. 中国农机化学报, 2019, 40(3): 128-132. |
| GAO Xia. Fault diagnosis method for hydraulic system of agricultural machinery based on improved SOM neural network [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(3): 128-132. | |
| 23 | 曹智军. 农业机械设备液压元件故障诊断系统设计与应用[J]. 农机化研究, 2020, 42(1): 255-260. |
| CAO Zhijun. Design and application on the fault diagnosis system for hydraulic components of agricultural machinery equipment [J]. Journal of Agricultural Mechanization Research, 2020, 42(1): 255-260. |
| [1] | YANG Ke, LI Ju, CHEN Yu, LI Hao, AO Yu, LEI Xiaolong. Design and testing of a liftable chassis for rice harvester [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 59-70. |
| [2] | CHEN Xu, HE Xun, ZHU Chenhui, WANG Baoshan, WANG Wanzhang. Research status and development trend of feed quantity detection technology for grain combine harvester [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 71-80. |
| [3] | LEI Xiaolong, CHEN Yu, LI Ju, YANG Ke, LIU Cheng, YU Xiangyang. Design and experiment of chassis automatic lifting hydraulic system for harvester [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(2): 9-18. |
| [4] | CHENG Zhen, SONG Jingling, XU Hongcen, ZHANG Mingliang. Overview of intelligent orientation technology of garlic seed based on machine vision [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(2): 63-70. |
| [5] | Wang Zhuoxuan, Wang Lihui, Xu Ninghui, Li Yong, Shi Jiachen. Research on the control strategy of sideslip and hysteresis of intelligent harvesting robot [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(2): 37-44. |
| [6] | Wang Chen, Ma Ye, Li Wei, Zhang Jie, Praveen Kumar Donta, Chen Guangming, Xiao Maohua. Design of monitoring systemfor temperature and humidity of garlic cold storage based on the Internet of Things technology [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(1): 37-45. |
| [7] | Wenming Chen, , Lianglong Hu, Jianning Yuan, Gongpu Wang, Bing Wang, Wen Wu, #br#. Research status and prospects of automatic control technology of vegetable harvester in China#br# [J]. Journal of Intelligent Agricultural Mechanization, 2021, 2(2): 57-63. |
| [8] | Man Chen, Chengqian Jin, Tengxiang Yang, Guangyue Zhang, Youliang Ni. Development and test of on-line monitoring system for rice harvester operation quality* [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2020, 1(2): 26-33. |
| [9] | Yang Li, Zhen Xue, Lizhang Xu, Yaoming Li, Jie Qiu, Yingfeng Wang. Research progress on the monitoring methods of the separating loss in grain combine harvester* [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2020, 1(1): 13-23. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||