农业农村部主管 农业农村部南京农业机械化研究所主办
ISSN 2096-7217 CN 32-1887/S2
智能化农业装备学报(中英文) ›› 2024, Vol. 5 ›› Issue (4): 95-106.DOI: 10.12398/j.issn.2096-7217.2024.04.007
• • 上一篇
韦慧玲1( ), 梁成斌1, 王金海2, 陈明猷1, 罗陆锋1()
), 梁成斌1, 王金海2, 陈明猷1, 罗陆锋1()
收稿日期:2024-02-27
修回日期:2024-04-22
出版日期:2024-11-15
发布日期:2024-11-15
通讯作者:
罗陆锋,男,1982年生,湖南娄底人,博士,教授;研究方向为采摘机器人、机器视觉等。E-mail: luolufeng617@163.com
作者简介:韦慧玲,女,1986年生,广西贵港人,博士,副教授;研究方向为绳牵引机器人、采摘机器人。E-mail: weihuiling2007@126.com
基金资助:
WEI Huiling1(), LIANG Chengbin1, WANG Jinhai2, CHEN Mingyou1, LUO Lufeng1()
Received:2024-02-27
Revised:2024-04-22
Online:2024-11-15
Published:2024-11-15
Contact:
LUO Lufeng
摘要:
绳牵引并联机器人具有结构简单、运动惯性小、可重构、响应速度快等特点,成为近年来机器人领域研究的热点。而绳驱柔性机械手由于其驱动绳索的柔弹性为任务操作提供了一定的适应性和柔顺性,能够实现作业对象与机械手良好的动态交互,提高防破损耦合的能力,引起了农业机器人领域科研人员的广泛关注。由于农业采摘机器人的作业环境具有非结构化、不确定的特点,而大多数的果实外表皮脆弱易损,因此对直接与果实接触的采摘机械手要求更严格,既要满足稳定抓持又不能损伤果实。为实现采摘机器人高效精准作业,与生物友好交互的轻量化柔性末端执行机构是急需重点突破的关键理论技术之一。首先,阐述了具有商业应用前景的绳驱柔性机械手的特点及发展概况;然后,详细综述了国内外研究人员对绳驱柔性机械手的设计、建模和控制等理论的研究进展,进一步概述了绳驱柔性机械手在肢体康复和灵巧操作领域的应用开发,详细分析绳驱柔性机械手在农业采摘领域应用的意义,并对绳驱柔性机械手在番茄、苹果、草莓和黑莓采摘的研究现状进行分析;最后,针对现阶段绳驱柔性机械手在农业采摘存在的采摘准确度不高、通用性差和成本高、造成损伤、采摘效率低下等问题,指出今后绳驱柔性机械手商业化应用亟须在农机农艺协同、模块化与可重构设计、提高交互安全性、多传感器融合、采摘序列规划与强鲁棒控制等方面开拓创新,为果蔬机械化无损采摘机构的设计提供新的思路和方法。
中图分类号:
韦慧玲, 梁成斌, 王金海, 陈明猷, 罗陆锋. 绳驱柔性机械手研究进展及其在农业机器人中的应用[J]. 智能化农业装备学报(中英文), 2024, 5(4): 95-106.
WEI Huiling, LIANG Chengbin, WANG Jinhai, CHEN Mingyou, LUO Lufeng. Research progress of cable-driven flexible manipulator and its application in agricultural robots[J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 95-106.

图1 绳驱柔性机械手设计样机
Figure 1 Design prototype of cable-driven flexible manipulator

图2 绳驱柔性机械手建模样机
Figure 2 Modelling prototype of cable-driven flexible manipulator

图3 灵巧操作的绳驱机械手
Figure 3 Cable-driven robotic in the field of agile operation
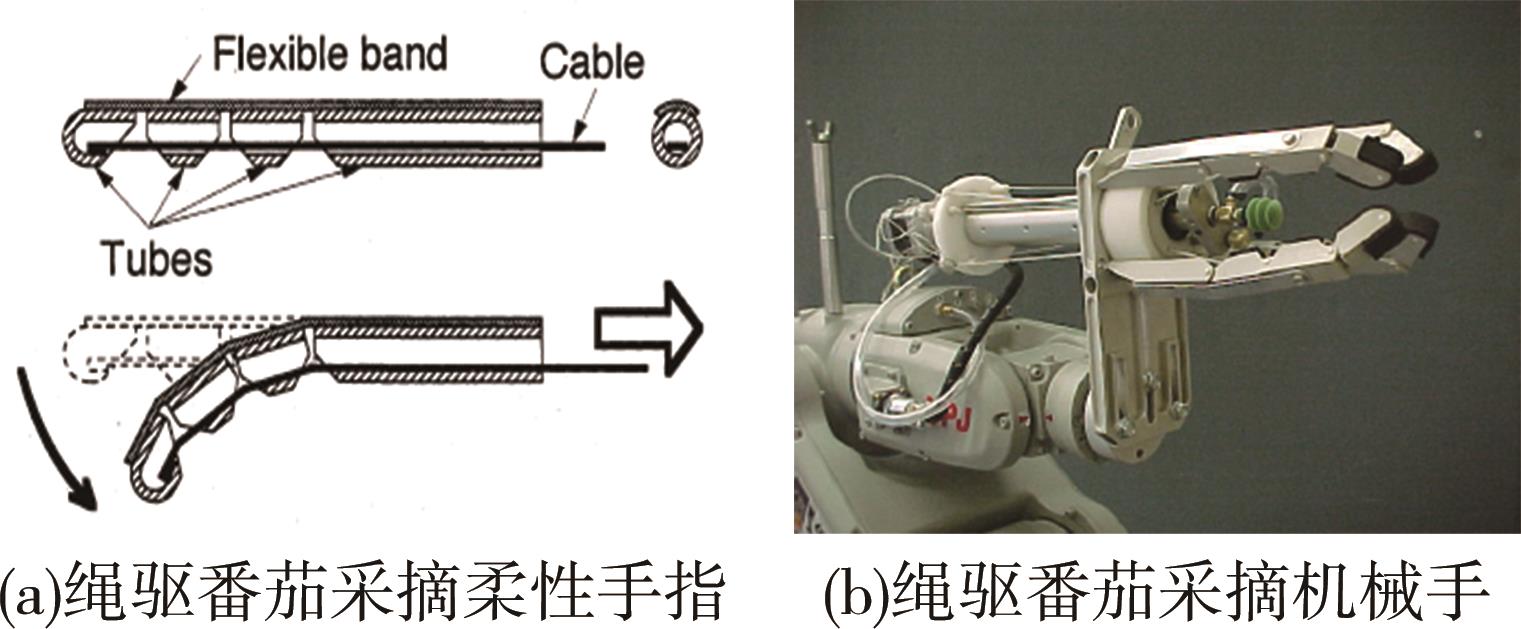
图4 绳驱番茄采摘机械手
Figure 4 Cable-driven tomato picking robot

图5 超冗余绳驱连续体采摘机器人
Figure 5 Super redundant cable-driven continuous picking robot

图6 绳驱苹果采摘机器人
Figure 6 Cable-driven apple picking robot
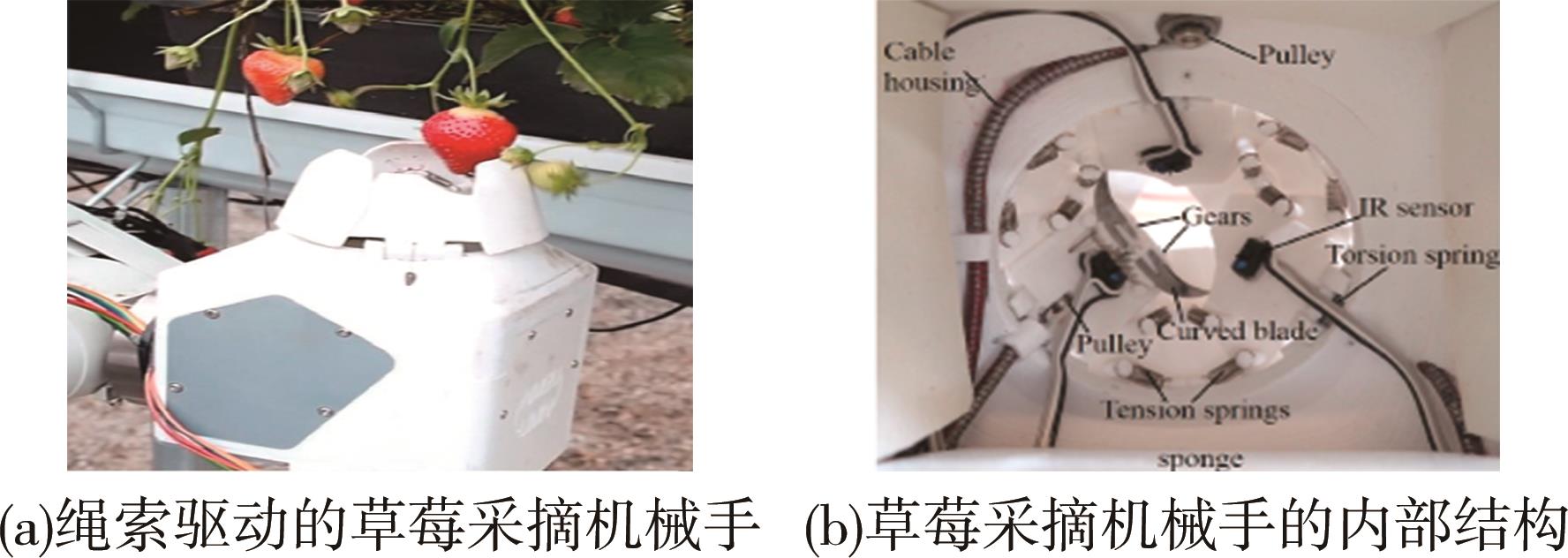
图7 绳驱草莓采摘机械手
Figure 7 Cable-driven gripper for strawberry picking
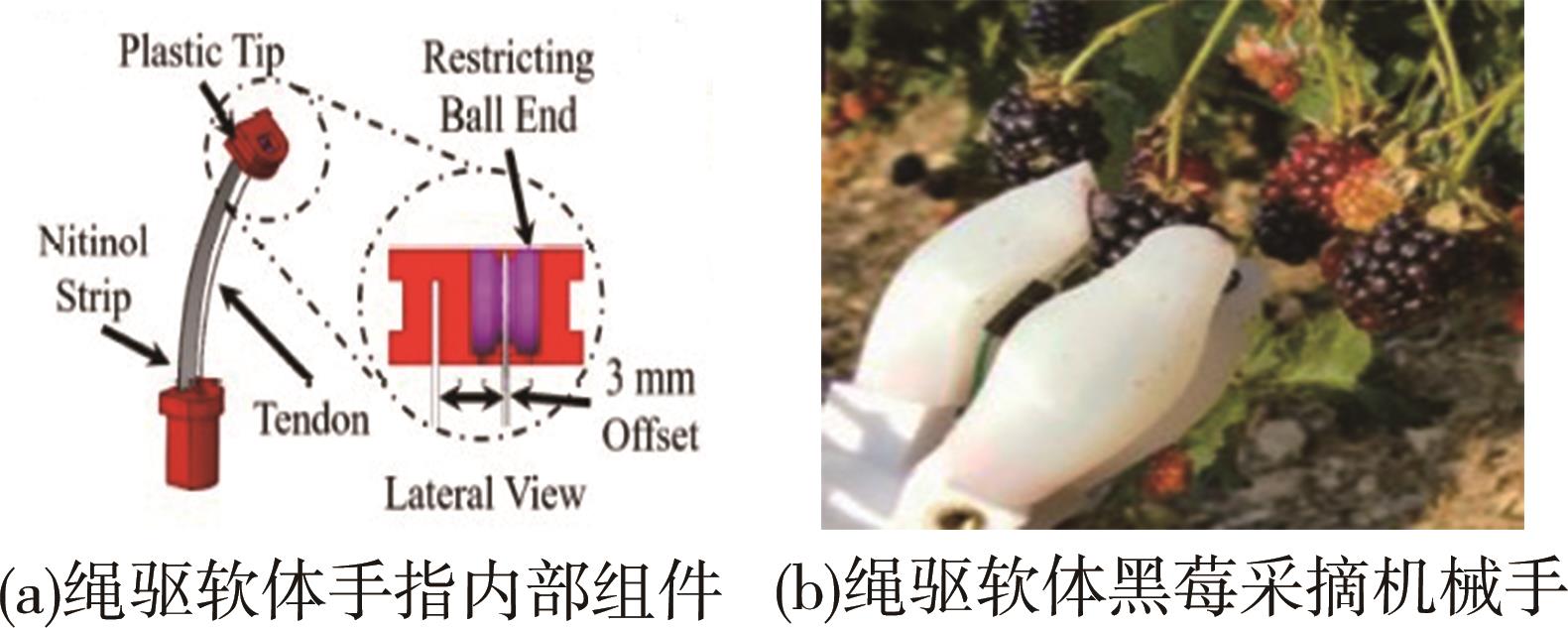
图8 绳驱软体黑莓采摘机械手
Figure 8 Cable-driven soft gripper for blackberry picking
| 性能参数 | 类型 | ||
|---|---|---|---|
| 刚性机械手 | 气动软体 机械手 | 绳驱柔性机械手 | |
| 结构特点 | 刚度高、笨重 | 刚度低、较笨重 | 可变刚度、轻量化 |
| 自由度 | 少 | 无限多 | 多 |
| 柔顺性 | 低 | 高 | 高 |
| 灵活性 | 低 | 较高 | 高 |
| 安全性 | 低 | 高 | 高 |
| 工作环境 | 结构化 | 结构化和 非结构化 | 结构化和 非结构化 |
| 建模难易 | 容易 | 困难 | 较容易 |
| 控制难易 | 容易 | 不易 | 较容易 |
| 传动效率 | 高 | 低 | 较高 |
| 操作对象 | 固定尺寸 | 可变尺寸 | 可变尺寸 |
| 输出力 | 大 | 小 | 可变 |
表1 不同类型的采摘机械手相关特性比较
Table 1 Comparison of relevant characteristics of different types of picking manipulator
| 性能参数 | 类型 | ||
|---|---|---|---|
| 刚性机械手 | 气动软体 机械手 | 绳驱柔性机械手 | |
| 结构特点 | 刚度高、笨重 | 刚度低、较笨重 | 可变刚度、轻量化 |
| 自由度 | 少 | 无限多 | 多 |
| 柔顺性 | 低 | 高 | 高 |
| 灵活性 | 低 | 较高 | 高 |
| 安全性 | 低 | 高 | 高 |
| 工作环境 | 结构化 | 结构化和 非结构化 | 结构化和 非结构化 |
| 建模难易 | 容易 | 困难 | 较容易 |
| 控制难易 | 容易 | 不易 | 较容易 |
| 传动效率 | 高 | 低 | 较高 |
| 操作对象 | 固定尺寸 | 可变尺寸 | 可变尺寸 |
| 输出力 | 大 | 小 | 可变 |
| 1 | LANGOWSKI J K A, SHARMA P, SHOUSHTARI A L. In the soft grip of nature [J].Science Robotics, 2020, 5(49): 1-3. |
| 2 | KANEKO M, PAETSCH W. Input-dependent stability of joint torque control of tendon-driven robot hands [J]. IEEE Transactions on Industrial Electronics, 1992, 39(2): 96-104. |
| 3 | MANTI M, HASSAN T, PASSETTI G, et al. A bioinspired soft robotic gripper for adaptable and effective grasping [J]. Soft Robotics, 2015, 2(3): 107-116. |
| 4 | TAN N, GU X Y, REN H L. Design, characterization and applications of a novel soft actuator driven by flexible shafts [J]. Mechanism and Machine Theory, 2018, 122: 197-218. |
| 5 | ZHANG P, CHEN W C, TANG B. From two-dimensional to three-dimensional: Diversified bending modality of a cable-driven actuator and its grasping characteristics [J]. Soft Robotics, 2022, 9(6): 1154-1166. |
| 6 | DONG H, ASADI E, QIU C, et al. Grasp analysis and optimal design of robotic fingertip for two tendon-driven fingers [J]. Mechanism and Machine Theory, 2018, 130: 447-462. |
| 7 | CAMARILLO D B, MILNE C F, CARLSON C R, et al. Mechanics modeling of tendon-driven continuum manipulators [J]. IEEE Transactions on Robotics, 2008, 24(6): 1262-1273. |
| 8 | PU S W, CHANG H T, CHANG J Y. Modeling and development of tension force measurement system for cable-driven hand exoskeleton robot [C]//2015 IEEE International Conference on Advanced Intelligent Mechatronics, 2015. |
| 9 | MIN S, YI S. Development of cable-driven anthropomorphic robot hand [J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1176-1183. |
| 10 | BACKUS S B, DOLLAR A M. An adaptive three-fingered prismatic gripper with passive rotational joints [J]. IEEE Robotics and Automation Letters, 2016, 1(2): 668-675. |
| 11 | ABEACH A, NEFTI M S, DAVIS S. Design of a variable stiffness soft dexterous gripper [J]. Soft Robotics, 2017, 4(3): 1-11. |
| 12 | LOVCHIK C S, DIFTLER M A. The robonaut hand: A dexterous robot hand for space [C]// Proceedings 1999 IEEE international conference on robotics and automation (Cat. No. 99 CH36288C). IEEE, 1999, 2: 907-912. |
| 13 | POTRATZ J, YANG J Z, ABDEL-MALEK K, et al. A light weight compliant hand mechanism with high degrees of freedom [J]. Journal of Biomechanical Engineering, 2005, 127: 934-945. |
| 14 | WU L J, ANDRADE M J, SAHARAN L K, et al. Compact and low-cost humanoid hand powered by nylon artificial muscles [J]. Bioinspiration and Biomimetics, 2017, 12(2): 026004. |
| 15 | PALLI G, NATALE C, MAY C, et al. Modeling and control of the twisted string actuation system [J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(2): 664-673. |
| 16 | PALLI G, HOSSEINI M, MELCHIORRI C. Twisted string actuation with sliding surfaces [C]// 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 2016: 260-265. |
| 17 | WISTE T, GOLDFARB M. Design of a simplified compliant anthropomorphic robot hand [C]// 2017 IEEE International Conference on Robotics and Automation, Singapore, 2017(1): 3433-3438. |
| 18 | HAM K, HAN J, PARK Y J. Soft gripper using variable stiffness mechanism and its application [J]. International Journal of Precision Engineering and Manufacturing, 2018, 19(4): 487-494. |
| 19 | LI C, GU X, REN H. A cable-driven flexible robotic grasper with lego-like modular and reconfigurable joints [J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2757-2767. |
| 20 | DONG H, ASADI E, QIU C, et al. Geometric design optimization of an under-actuated tendon-driven robotic gripper [J]. Robotics and Computer-Integrated Manufacturing, 2018, 50: 80-89. |
| 21 | TANG X T, LI K, LIU Y X, et al. A general soft robot module driven by twisted and coiled actuators [J]. Smart Materials and Structures, 2019, 28(3): 035019. |
| 22 | WANG R X, ZHANG X M, ZHU B L. Topology optimization of a cable-driven soft robotic gripper [J]. Structural and Multidisciplinary Optimization, 2020, 62(5): 2749-2763. |
| 23 | J-Y NAGASE, WAKIMOTO S, SATOH T, et al. Design of a variable-stiffness robotic hand using pneumatic soft rubber actuators [J]. Smart Materials and Structures, 2011, 20: 105015. |
| 24 | GIORELLI M, RENDA F, FERRI G, et al. A feed-forward neural network learning the inverse kinetics of a soft cable-driven manipulator moving in three-dimensional space [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 2013: 5033-5039. |
| 25 | CHEN F F, XU W J, ZHANG H Y, et al. Topology optimized design, fabrication and characterization of a soft cable-driven gripper [J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2463-2470. |
| 26 | WU Q, YI Z L, WANG H Q, et al. Design and experiment of a soft gripper based on cable-driven continuum structures [C]// Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics, December 27-31, 2021, Sanya, China. |
| 27 | CHEN T R, ZHAO X W, MA G C, et al. Design of 3D-printed cable driven humanoid hand based on bidirectional elastomeric passive transmission [J]. Chinese Journal of Mechanical Engineering, 2021, 34(1): 1-11. |
| 28 | 王国庆, 张启先, 李大寨, 等. 基于抓持稳定度的多指灵巧手抓持控制[J]. 航空学报, 1997, 18(3): 294-298. |
| WANG Guoqing, ZHANG Qixian, LI Dazhai, et al. Grasping control of the dexterous hand based on the degree of stability of grasping [J]. Acta Aeronautica et Astronautica Sinica, 1997, 18(3): 294-298. | |
| 29 | 何平, 金明河, 刘宏, 等. 机器人多指灵巧手基关节力矩/位置控制系统的研究[J]. 机器人, 2002, 24(4): 314-318. |
| HE Ping, JIN Minghe, LIU Hong, et al. Study of position and torque feedback control system of multi-fingered dexterous robot hand [J]. Robot, 2002, 24(4): 314-318. | |
| 30 | FIROUZEH A, PAIK J. Grasp mode and compliance control of an under-actuated origami gripper using adjustable stiffness joints [J]. IEEE-ASME Transactions on Mechatronics, 2017, 22(5): 2165-2173. |
| 31 | GAO Y, HUANG X G, MANN I S, et al. A novel variable stiffness compliant robotic gripper based on Layer jamming [J]. Journal of Mechanisms and Robotics, 2020, 12(5): 051013. |
| 32 | QIAO S, ZHANG L, LI B, et al. Coupled bending inwards motion and control strategy analysis of a cable-driven underactuated finger [J]. IEEE Access, 2021, 9: 133902-133913. |
| 33 | JEONG U, IN H K, CHO K J. Implementation of various control algorithms for hand rehabilitation exercise using wearable robotic hand [J]. Intelligent Service Robotics, 2013, 6: 181-189. |
| 34 | IN H, LEE H, JEONG U, et al. Feasibility study of a slack enabling actuator for actuating tendon-driven soft wearable robot without pretension [C]// IEEE International Conference on Robotics and Automation, Seattle, Washington, 2015: 1229-1234. |
| 35 | KAZEMINASAB S, HADI A, ALIPOUR K, et al. Force and motion control of a tendon-driven hand exoskeleton actuated by shape memory alloys [J]. Industrial Robot-the International Journal of Robotics Research and Application, 2018, 45(5): 623-633. |
| 36 | TOKUJI O. Computer control of multijointed finger system for precise object-handling [J]. IEEE Transactions on Systems, Man, and Cybernetics, 1982, 12(3): 289-299. |
| 37 | JACOBSEN S C, WOOD J E, KNUTTI D F, et al. The UTAH/MIT dextrous hand: Work in progress [J]. The International Journal of Robotics Research, 1984, 3(4): 21-50. |
| 38 | MATTHEW T M, J.KENNETH S, JOEY K P. Robot hands and the mechanics of manipulation [M]. MIT Press, Cambridge, USA, 1985: 3-93. |
| 39 | TUFFIELD P, ELIAS H. The shadow robot mimics human actions [J]. Industrial Robot: An International Journal, 2003, 30(1): 56-60. |
| 40 | DESHPANDE A D, XU Z, WEGHE M, et al. Mechanisms of the anatomically correct testbed hand [J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 238-250. |
| 41 | MISHRA A K, DOTTORE E D, SADEGHI A, et al. SIMBA: Tendon-driven modular continuum arm with soft reconfigurable gripper [J]. Frontiers in Robotics and AI, 2017, 4(4): 1-10. |
| 42 | 中华人民共和国国家统计局. 2022中国统计年鉴[M]. 北京: 中国统计出版社, 2022. |
| 43 | 刘继展, 李智国, 李萍萍. 番茄采摘机器人快速无损作业研究[M]. 北京: 科学出版社, 2018. |
| 44 | BAC C W, VAN HENTEN E J, HEMMING J, et al. Harvesting robots for high-value crops: State-of-the-art review and challenges ahead [J]. Journal of Field Robotics, 2014, 31(6): 888-911. |
| 45 | MALDERA F, VIVALDI G A, IGLESIAS-CASTELLARNAU I, et al. Two almond cultivars trained in a super-high density orchard show different growth, yield efficiencies and damages by mechanical harvesting [J]. Agronomy, 2021, 11: 1406. |
| 46 | 孙凝晖, 张玉成, 石晶林. 构建我国第三代农机的创新体系[J]. 中国科学院院刊, 2020, 35(2): 154-165. |
| SUN Ninghui, ZHANG Yucheng, SHI Jinglin. Build innovation system of third generation of agricultural machinery in China [J]. Bulletin of Chinese Academy of Sciences, 2020, 35(2): 154-165. | |
| 47 | 赵春江. 智慧农业发展现状及战略目标研究[J]. 智慧农业, 2019, 1(1): 1-7. |
| ZHAO Chunjiang. State-of-the-art and recommended developmental strategic objectivs of smart agriculture [J]. Smart Agriculture, 2019, 1(1): 1-7. | |
| 48 | VASCONEZ J P, KANTOR G A, AUAT CHEEIN F A. Humane-robot interaction in agriculture: A survey and current challenges [J]. Biosystems Engineering, 2019, 179: 35-48. |
| 49 | RICHARD H. How robots are grasping the art of gripping [J]. Nature, 2018, 557(7704): 23-25. |
| 50 | LUO L, TANG Y, ZOU X, et al. Vision-based extraction of spatial information in grape cluster for harvesting robots [J]. Biosystems Engineering, 2016, 151(11): 90-104. |
| 51 | 吴剑桥, 范圣哲, 贡亮, 等. 果蔬采摘机器手系统设计与控制技术研究现状和发展趋势[J]. 智慧农业(中英文), 2020, 2(4): 17-40. |
| WU Jianqiao, FAN Shengzhe, GONG Liang, et al. Research status and development direction of design and control technology of fruit and vegetable picking robot system [J]. Smart Agriculture, 2020, 2(4): 17-40. | |
| 52 | 蔡世波, 陶志成, 万伟伟, 等. 机器人多指灵巧手的研究现状、趋势与挑战[J]. 机械工程学报, 2021, 57(15): 1-14. |
| CAI Shibo, TAO Zhicheng, WAN Weiwei, et al. Multi-fingered dexterous hands: From simplicity to complexity and simplifying complex applications [J]. Journal of Mechanical Engineering, 2021, 57(15): 1-14. | |
| 53 | XIONG Y, PENG C, GRIMSTAD L, et al. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper [J]. Computers and Electronics in Agriculture, 2019, 157: 392-402. |
| 54 | CERES R, PONS J L, JIMÉNEZ A R, et al. Design and implementation of an aided fruit-harvesting robot (Agribot) [J]. Industrial robot, 1998, 5(5): 337-346. |
| 55 | 刘成良, 贡亮, 苑进, 等. 农业机器人关键技术研究现状与发展趋势[J]. 农业机械学报, 2022, 53(7): 1-22, 55. |
| LIU Chengliang, GONG Liang, YUAN Jin, et al. Current status and development trends of agricultural robots [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(7): 1-22, 55. | |
| 56 | MONTA M, KONDO N, TING K C. Harvesting end-effector for inverted single truss tomato production systems [J]. Journal of the Japanese Society of Agricultural Machinery, 1998, 60(6): 97-104. |
| 57 | MONTA M, KONDO N, TING K C. End-effectors for tomato harvesting robot [J]. Artificial Intelligence Review, 1998, 13(1-3): 11-25. |
| 58 | LING P P, EHSANI R, TING K C, et al. Sensing and end-effector for a robotic tomato harvester [C]// ASAE Annual International Meeting, 2004: 1-12. |
| 59 | YESHMUKHAMETOV A, KOGANEZAWA K, YAMAMOTO Y. Design and kinematics of cable-driven continuum robot arm with universal joint backbone [C]// IEEE International Conference on Robotics and Biomimetics. IEEE, 2018, December 12-15, 2018, Kuala Lumpur, Malaysia, 2444-2449. |
| 60 | YESHMUKHAMETOV A, KOGANEZAWA K, BURIBAYEV Z, et al. Development of continuum robot arm and gripper for harvesting cherry tomatoes [J]. Applied Science, 2022, 12: 6922. |
| 61 | SILWAL A, DAVIDSON J R, KARKEE M, et al. Design, integration, and field evaluation of a robotic apple harvester [J]. Journal of Field Robotics, 2017, 34(6): 1140-1159. |
| 62 | DAVIDSON J R, MO C. Conceptual design of an end-effector for an apple harvesting robot [C]// Conference on Automation Technology for Off-Road Equipment (ATOE), Beijing, China. 2014, 18: 2021. |
| 63 | DAVIDSON J R, MO C. Mechanical design and initial performance testing of an apple-picking end-effector [C]//ASME International Mechanical Engineering Congress and Exposition. American Society of Mechanical Engineers, 2015, 57397: V04 AT 04A011. |
| 64 | XIONG Y, FROM P J, ISLER V O. Design and evaluation of a novel cable-driven gripper with perception capabilities for strawberry picking robots [C]// 2018 IEEE International Conference on Robotics and Automation (ICRA), May 21-25, 2018, Brisbane, Australia,7384-7391. |
| 65 | XIONG Y, GE Y Y, GRIMSTAD L, et al. An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation [J]. Journal of Field Robotics, 2020, 37(2): 202-224. |
| 66 | GUNDERMAN A L, COLLINS J, MYER A, et al. Tendon-driven soft robotic gripper for blackberry harvesting [J]. IEEE Robotics and Automation Letters, 2022, 7(2): 2652-2659. |
| 67 | 高国华, 董增雅, 孙晓娜, 等. 基于3D打印的柔性机械手研制及试验研究[J]. 智慧农业, 2019, 1(1): 85-95. |
| GAO Guohua, DONG Zengya, SUN Xiaona, et al. Development and test of a flexible manipulator based on 3D printing [J]. Smart Agriculture, 2019, 1(1): 85-95. |
| [1] | 李建平, 李绍波, 杨欣, 张阔, 谢金燕, 刘树腾, 姜尊豪, 张詝, 王朋. 苹果园生产管理智能机械化技术与装备研究进展与展望[J]. 智能化农业装备学报(中英文), 2024, 5(4): 66-83. |
| [2] | 王元红, 杨志明, 王琪, 卢劲竹, 高俊锋. 基于YOLOv5s-SPD的茶芽识别方法及识别系统光源设计与试验[J]. 智能化农业装备学报(中英文), 2024, 5(3): 33-43. |
| [3] | 魏堂伟, 张津诚, 王晶, 周庆燕. 基于改进YOLOv7的茶叶嫩芽识别模型研究[J]. 智能化农业装备学报(中英文), 2024, 5(2): 42-50. |
| [4] | 闫全涛, 李丽霞, 邱权, 丛岳. 小型农田原状土样采集机器人系统研发与测试[J]. 智能化农业装备学报(中英文), 2024, 5(1): 12-22. |
| [5] | 李搴曦, 孙晓明, 江晗慧, 吴爱茹, 傅隆生, 李瑞. 基于YOLOv4-tiny的设施番茄智能喷药无人车设计与试验[J]. 智能化农业装备学报(中英文), 2023, 4(2): 44-52. |
| [6] | 段洁利, 王昭锐, 叶磊, 杨洲, . 水果采摘机械臂运动规划研究进展与发展趋势[J]. 智能化农业装备学报(中英文), 2021, 2(2): 7-17. |
| [7] | 赵静娟, 杨艳萍, 郑怀国, 董瑜. 全球农业机器人研发趋势预测*[J]. 智能化农业装备学报(中英文), 2021, 2(1): 28-35. |
| [8] | 毛婷婷, 董淑娴, 薛金林. 农业机器人车辆人机协作控制的动态功能分配研究*[J]. 智能化农业装备学报(中英文), 2020, 1(1): 24-31. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||