农业农村部主管 农业农村部南京农业机械化研究所主办
ISSN 2096-7217 CN 32-1887/S2
智能化农业装备学报(中英文) ›› 2025, Vol. 6 ›› Issue (2): 69-78.DOI: 10.12398/j.issn.2096-7217.2025.02.006
栾宇航1( ), 钱宇星1, 高敏1, 王明宇1, 李秀辰1,2,3, 张寒冰1,2,3()
), 钱宇星1, 高敏1, 王明宇1, 李秀辰1,2,3, 张寒冰1,2,3()
收稿日期:2025-03-03
修回日期:2025-04-03
出版日期:2025-05-15
发布日期:2025-05-20
通讯作者:
张寒冰
作者简介:栾宇航,男,1998年生,辽宁沈阳人,硕士研究生;研究方向为渔业装备。E-mail: 1151681767@qq.com
基金资助:
LUAN Yuhang1(), QIAN Yuxing1, GAO Min1, WANG Mingyu1, LI Xiuchen1,2,3, ZHANG Hanbing1,2,3()
Received:2025-03-03
Revised:2025-04-03
Online:2025-05-15
Published:2025-05-20
Contact:
ZHANG Hanbing
Supported by:摘要:
为提高智能贝类播苗设备离散元仿真参数的准确性,本研究首次系统标定了移滩规格四角蛤蜊贝苗与接触材料(EVA、不锈钢板)及贝苗间的接触参数。通过物理特性试验与离散元相结合的方法对贝苗接触参数进行标定。利用三维扫描仪逆向工程技术获取贝苗轮廓,基于Hertz-Mindlin无滑移接触模型建立贝苗颗粒模型。分别采用自由下落碰撞法、倾斜平面滑动法、固定斜面滚动法对贝苗与接触材料(EVA、不锈钢板)间接触参数进行标定,结果表明:贝苗与EVA间碰撞恢复系数、静摩擦系数、滚动摩擦系数分别为0.339、0.538、0.205;贝苗与不锈钢板间碰撞恢复系数、静摩擦系数、滚动摩擦系数分别为0.128、0.323、0.177。通过悬挂碰撞法与MXZ-1型摩擦系数仪测定贝苗间接触参数。以贝苗与贝苗间接触参数为试验因素,以实测堆积角与仿真堆积角相对误差为指标,进行三因素三水平正交试验,以最小相对误差为优化目标,对试验数据寻优分析得到:贝苗与贝苗间碰撞恢复系数、静摩擦系数、滚动摩擦系数分别为0.170、0.620、0.313。通过提升圆筒法对标定结果进行验证试验,结果表明:仿真堆积角与实测堆积角相对误差为3.6%,证明标定结果真实可靠。本研究填补了移滩四角蛤蜊贝苗离散元参数标定的空白,为智能播苗设备的料仓倾角、落料口位置和叶轮盘等关键部件优化提供了理论依据。
中图分类号:
栾宇航, 钱宇星, 高敏, 王明宇, 李秀辰, 张寒冰. 智能贝类播苗设备离散元仿真参数标定[J]. 智能化农业装备学报(中英文), 2025, 6(2): 69-78.
LUAN Yuhang, QIAN Yuxing, GAO Min, WANG Mingyu, LI Xiuchen, ZHANG Hanbing. Discrete element simulation parameter calibration for smart shellfish seeding devices[J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 69-78.

图1 贝苗离散元模型建模过程
Figure 1 Modeling process of discrete element model of clam seedling
| 材料 | 参数 | 数值 |
|---|---|---|
| 不锈钢板 | 泊松比v 弹性模量E/Pa 密度ρ/(g·cm-3) | 0.3 7.42×1010 7.93 |
| EVA | 泊松比v 弹性模量E/Pa 密度ρ/(g·cm-3) | 0.25 1.64×108 0.92 |
表1 接触材料物理参数
Table 1 Contact material physical parameters
| 材料 | 参数 | 数值 |
|---|---|---|
| 不锈钢板 | 泊松比v 弹性模量E/Pa 密度ρ/(g·cm-3) | 0.3 7.42×1010 7.93 |
| EVA | 泊松比v 弹性模量E/Pa 密度ρ/(g·cm-3) | 0.25 1.64×108 0.92 |
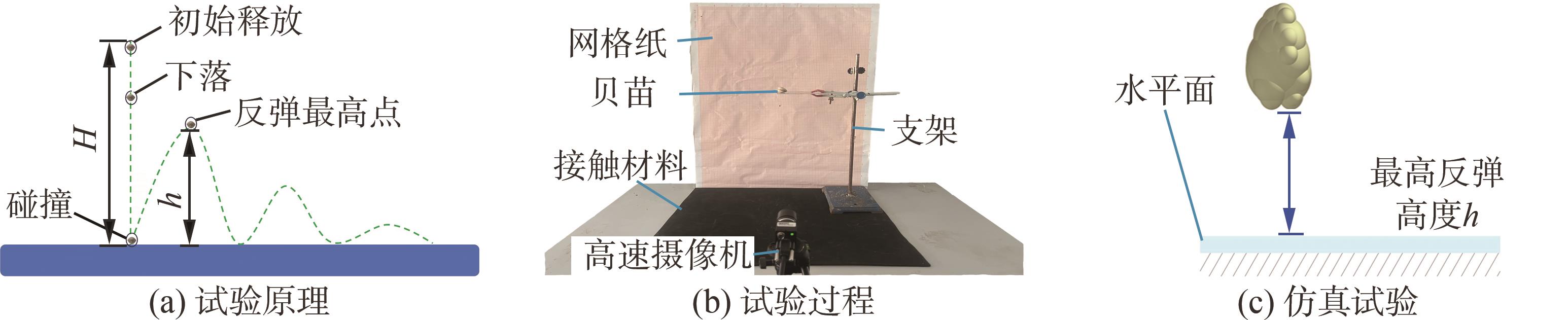
图2 贝苗与接触材料间碰撞恢复系数标定试验
Figure 2 Calibration test of collision recovery coefficient between clam seedlings and materials
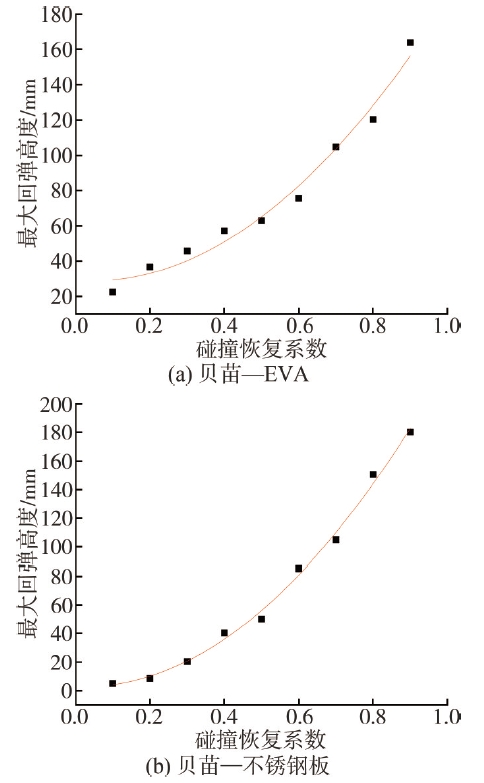
图3 碰撞恢复系数与最大回弹高度拟合曲线
Figure 3 Collision recovery coefficient and maximum rebound height fit curve
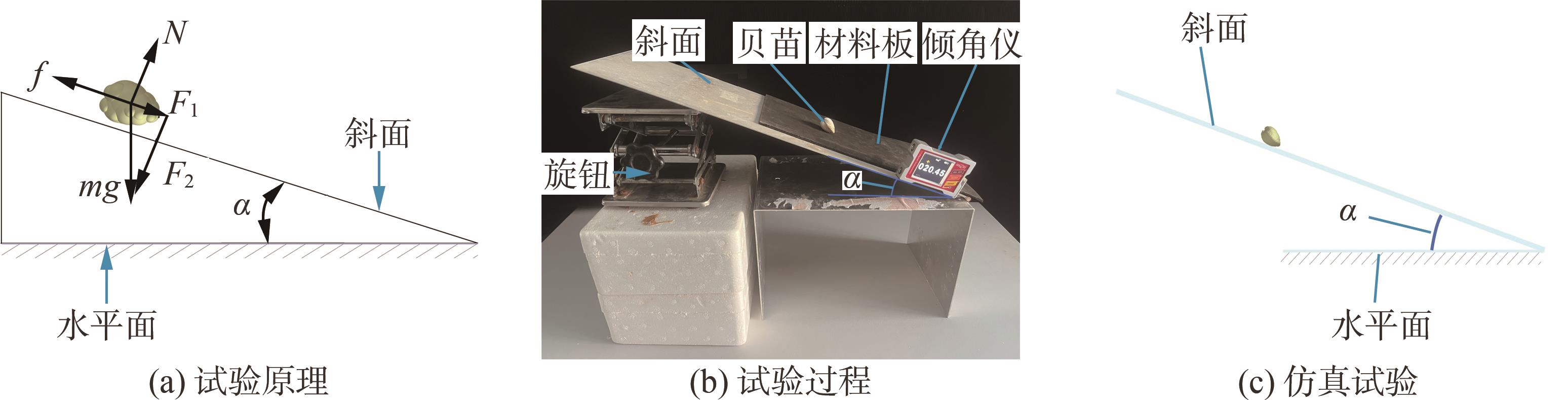
图4 贝苗与材料间静摩擦系数标定试验
Figure 4 Calibration test of static friction factor between clam seedlings and materials
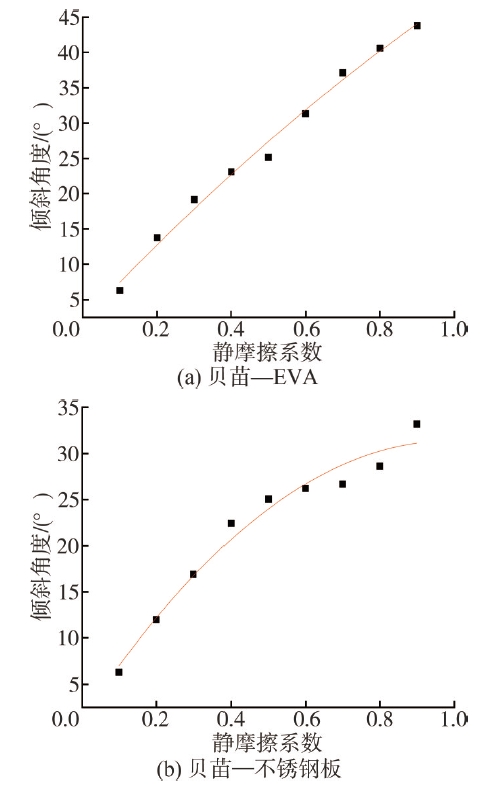
图5 静摩擦系数与夹角拟合曲线
Figure 5 Static friction coefficient and angle fitting curve
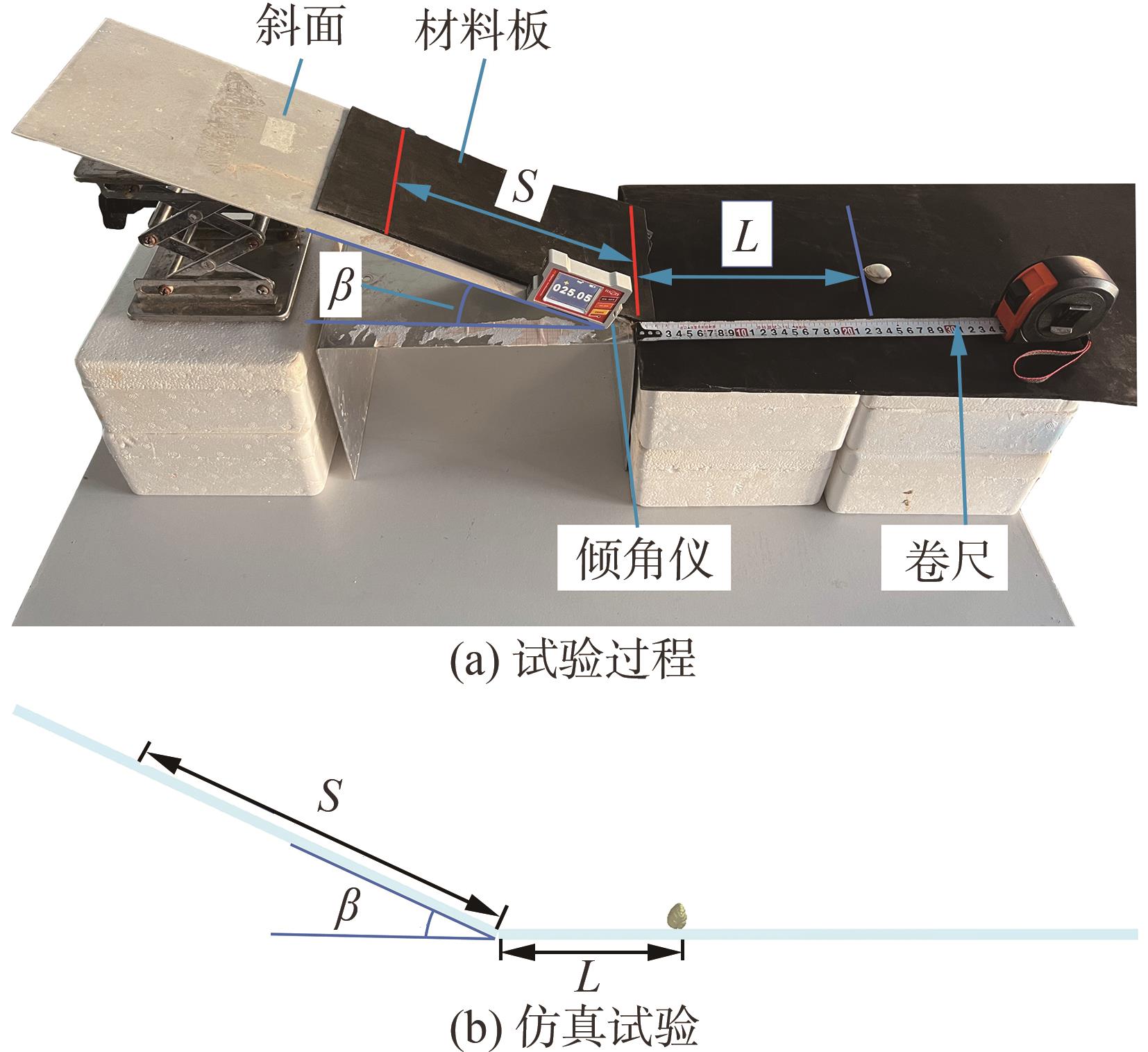
图6 贝苗与材料间滚动摩擦系数标定试验
Figure 6 Calibration test of rolling friction factor between clam seedlings and materials
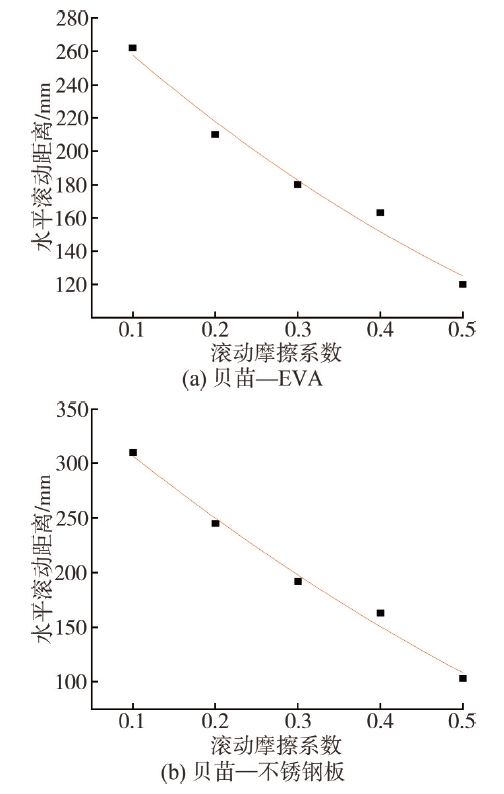
图7 滚动摩擦系数与水平滚动距离回归模型
Figure 7 Rolling friction coefficient and horizontal rolling distance regression model
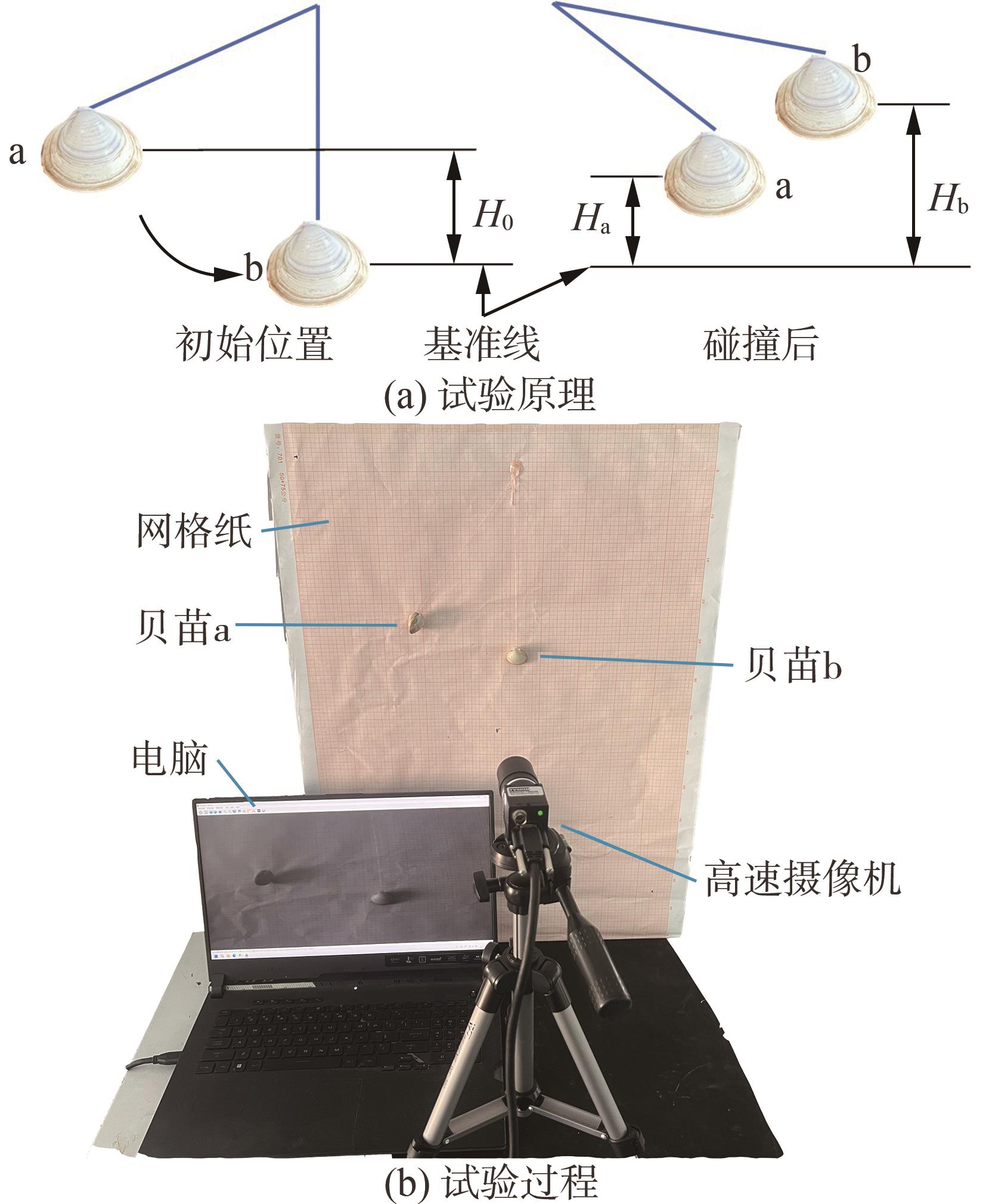
图8 贝苗与贝苗间碰撞恢复系数试验
Figure 8 Test of collision recovery coefficient between clam seedlings and clam seedlings
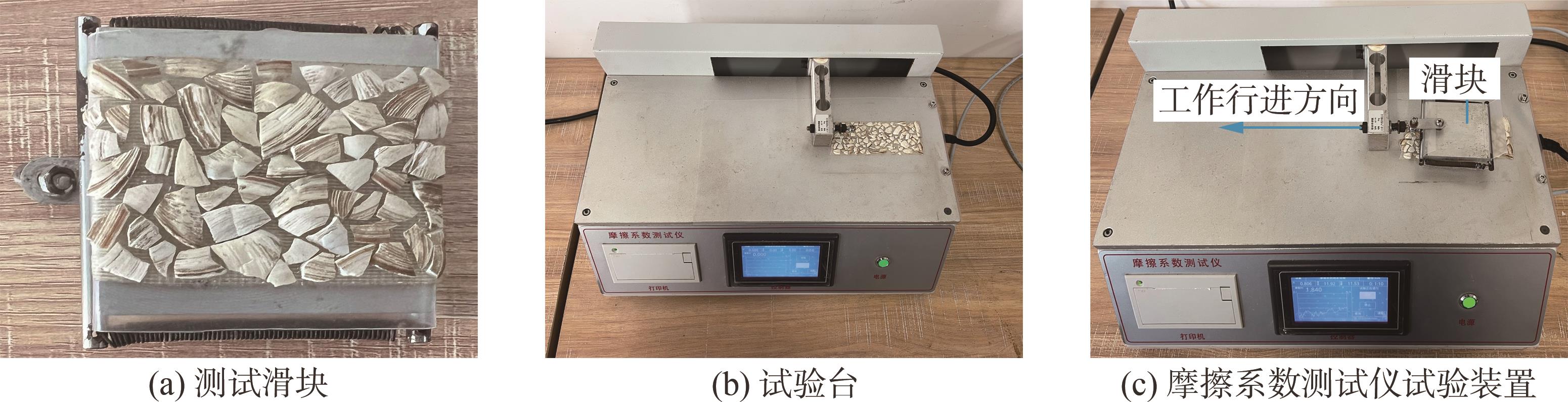
图9 贝苗与贝苗间摩擦系数测定试验
Figure 9 Test for the friction coefficient between the clam seedlings and clam seedlings
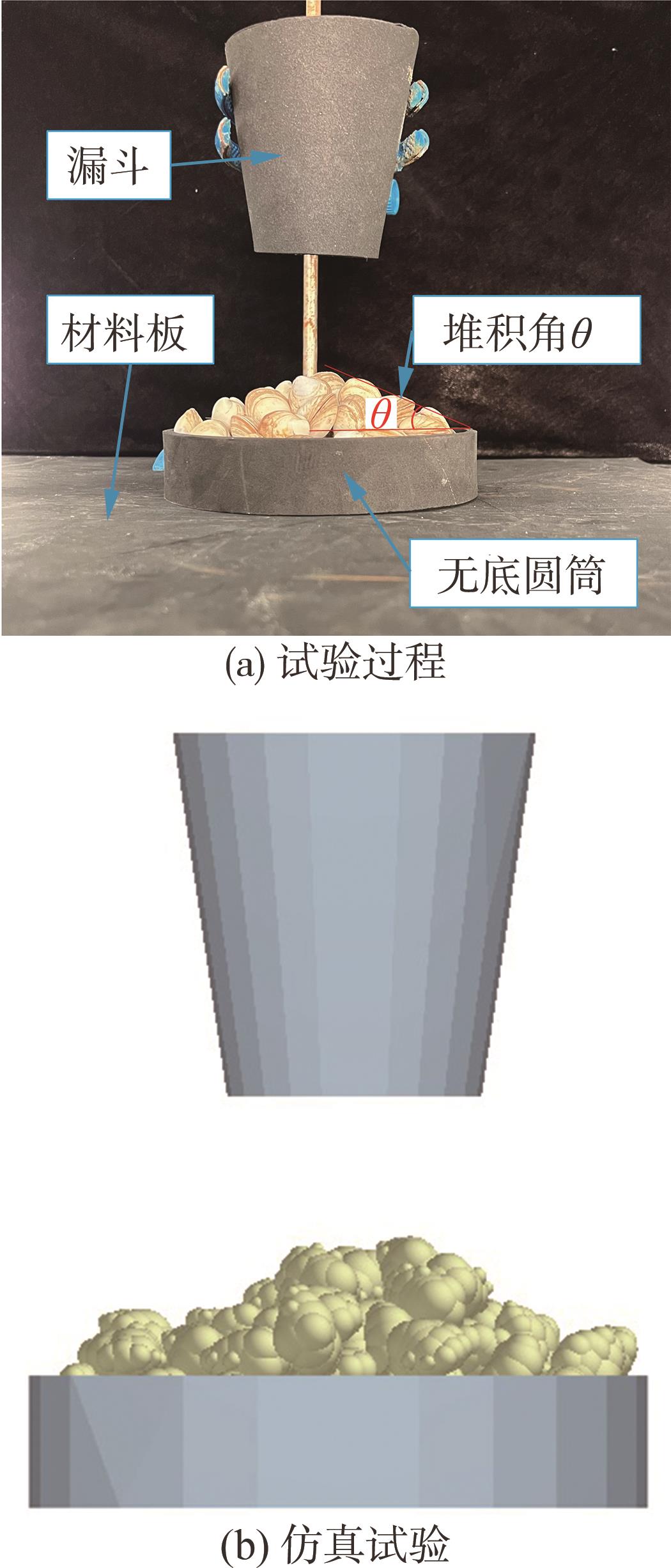
图10 堆积角测定试验
Figure 10 Stacking angle test

图11 Matlab软件处理
Figure 11 Matlab software processing
| 编码 | 因素 | ||
|---|---|---|---|
| e | μn | μr | |
| -1 | 0.17 | 0.581 | 0.307 |
| 0 | 0.305 | 0.628 | 0.380 5 |
| 1 | 0.44 | 0.675 | 0.454 |
表2 因素水平编码表
Table 2 Factor level coding table
| 编码 | 因素 | ||
|---|---|---|---|
| e | μn | μr | |
| -1 | 0.17 | 0.581 | 0.307 |
| 0 | 0.305 | 0.628 | 0.380 5 |
| 1 | 0.44 | 0.675 | 0.454 |
| 序号 | 因素 | Y/% | ||
|---|---|---|---|---|
| e | μn | μr | ||
| 1 | 0.17 | 0.628 | 0.307 | 3.18 |
| 2 | 0.44 | 0.628 | 0.454 | 10.97 |
| 3 | 0.17 | 0.628 | 0.454 | 10.69 |
| 4 | 0.305 | 0.581 | 0.307 | 4.62 |
| 5 | 0.305 | 0.628 | 0.380 5 | 9.51 |
| 6 | 0.305 | 0.628 | 0.380 5 | 10.54 |
| 7 | 0.44 | 0.628 | 0.307 | 9.71 |
| 8 | 0.44 | 0.581 | 0.380 5 | 9.11 |
| 9 | 0.305 | 0.675 | 0.307 | 9.69 |
| 10 | 0.17 | 0.581 | 0.380 5 | 4.25 |
| 11 | 0.305 | 0.628 | 0.380 5 | 9.37 |
| 12 | 0.44 | 0.675 | 0.380 5 | 10.98 |
| 13 | 0.305 | 0.628 | 0.380 5 | 10.67 |
| 14 | 0.17 | 0.675 | 0.380 5 | 10.17 |
| 15 | 0.305 | 0.581 | 0.454 | 10.58 |
| 16 | 0.305 | 0.628 | 0.380 5 | 10.51 |
| 17 | 0.305 | 0.675 | 0.454 | 12.27 |
表3 三因素三水平正交试验方案与结果
Table 3 Scheme and results of three-factor and three-level orthogonal experiment
| 序号 | 因素 | Y/% | ||
|---|---|---|---|---|
| e | μn | μr | ||
| 1 | 0.17 | 0.628 | 0.307 | 3.18 |
| 2 | 0.44 | 0.628 | 0.454 | 10.97 |
| 3 | 0.17 | 0.628 | 0.454 | 10.69 |
| 4 | 0.305 | 0.581 | 0.307 | 4.62 |
| 5 | 0.305 | 0.628 | 0.380 5 | 9.51 |
| 6 | 0.305 | 0.628 | 0.380 5 | 10.54 |
| 7 | 0.44 | 0.628 | 0.307 | 9.71 |
| 8 | 0.44 | 0.581 | 0.380 5 | 9.11 |
| 9 | 0.305 | 0.675 | 0.307 | 9.69 |
| 10 | 0.17 | 0.581 | 0.380 5 | 4.25 |
| 11 | 0.305 | 0.628 | 0.380 5 | 9.37 |
| 12 | 0.44 | 0.675 | 0.380 5 | 10.98 |
| 13 | 0.305 | 0.628 | 0.380 5 | 10.67 |
| 14 | 0.17 | 0.675 | 0.380 5 | 10.17 |
| 15 | 0.305 | 0.581 | 0.454 | 10.58 |
| 16 | 0.305 | 0.628 | 0.380 5 | 10.51 |
| 17 | 0.305 | 0.675 | 0.454 | 12.27 |
| 方差来源 | 平方和 | 自由度 | 均方 | F值 | P值 |
|---|---|---|---|---|---|
| 模型 | 107.67 | 9 | 11.96 | 43.18 | <0.000 1 |
| e | 19.47 | 1 | 19.47 | 70.27 | <0.000 1 |
| μn | 25.49 | 1 | 25.49 | 92.00 | <0.000 1 |
| μr | 38.63 | 1 | 38.63 | 139.43 | <0.000 1 |
| eμn | 4.10 | 1 | 4.10 | 14.80 | 0.006 3 |
| eμr | 9.77 | 1 | 9.77 | 35.25 | 0.000 6 |
| μnμr | 3.33 | 1 | 3.33 | 12.02 | 0.010 4 |
| e2 | 5.15 | 1 | 5.15 | 18.60 | 0.003 5 |
| μn2 | 0.628 2 | 1 | 0.628 2 | 2.27 | 0.175 9 |
| μr2 | 0.596 1 | 1 | 0.596 1 | 2.15 | 0.185 9 |
| 失拟项 | 0.373 9 | 3 | 0.124 6 | 0.318 4 | 0.812 9 |
| 误差 | 1.57 | 4 | 0.391 4 | ||
| 总和 | 109.61 | 16 |
表4 试验结果方差分析
Table 4 Analysis of variance of experimental results
| 方差来源 | 平方和 | 自由度 | 均方 | F值 | P值 |
|---|---|---|---|---|---|
| 模型 | 107.67 | 9 | 11.96 | 43.18 | <0.000 1 |
| e | 19.47 | 1 | 19.47 | 70.27 | <0.000 1 |
| μn | 25.49 | 1 | 25.49 | 92.00 | <0.000 1 |
| μr | 38.63 | 1 | 38.63 | 139.43 | <0.000 1 |
| eμn | 4.10 | 1 | 4.10 | 14.80 | 0.006 3 |
| eμr | 9.77 | 1 | 9.77 | 35.25 | 0.000 6 |
| μnμr | 3.33 | 1 | 3.33 | 12.02 | 0.010 4 |
| e2 | 5.15 | 1 | 5.15 | 18.60 | 0.003 5 |
| μn2 | 0.628 2 | 1 | 0.628 2 | 2.27 | 0.175 9 |
| μr2 | 0.596 1 | 1 | 0.596 1 | 2.15 | 0.185 9 |
| 失拟项 | 0.373 9 | 3 | 0.124 6 | 0.318 4 | 0.812 9 |
| 误差 | 1.57 | 4 | 0.391 4 | ||
| 总和 | 109.61 | 16 |
| 接触类型 | 碰撞恢复系数 | 静摩擦系数 | 滚动摩擦系数 |
|---|---|---|---|
| 贝苗—贝苗 | 0.170 | 0.620 | 0.313 |
| 贝苗—不锈钢板 | 0.128 | 0.323 | 0.177 |
| 贝苗—EVA | 0.339 | 0.538 | 0.205 |
表5 标定参数汇总表
Table 5 Calibration parameter summary
| 接触类型 | 碰撞恢复系数 | 静摩擦系数 | 滚动摩擦系数 |
|---|---|---|---|
| 贝苗—贝苗 | 0.170 | 0.620 | 0.313 |
| 贝苗—不锈钢板 | 0.128 | 0.323 | 0.177 |
| 贝苗—EVA | 0.339 | 0.538 | 0.205 |
| 1 | 农业农村部渔业渔政管理局. 2024年中国渔业统计年鉴[M]. 北京: 中国农业出版社, 2024. |
| 2 | 徐泳, 李红艳, 黄文彬. 耕作土壤动力学的三维离散元建模和仿真方案策划[J]. 农业工程学报, 2003(2): 34-38. |
| XU Yong, LI Hongyan, HUANG Wenbin. Modeling and methodological strategy of discrete element method simulation for tillage soil dynamics [J]. Transactions of the Chinese Society of Agricultural Engineering, 2003(2): 34-38. | |
| 3 | 张锐, 韩佃雷, 吉巧丽, 等. 离散元模拟中沙土参数标定方法研究[J]. 农业机械学报, 2017, 48(3): 49-56. |
| ZHANG Rui, HAN Tianlei, JI Qiaoli, et al. Calibration methods of sandy soil parameters in simulation of discrete element method [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 49-56. | |
| 4 | 张胜伟, 李华. 绿豆种子离散元参数标定及排料设备优化[J]. 农业工程学报, 2020, 36(12): 45-52. |
| ZHANG Shengwei, LI Hua. Calibration of discrete element parameters of mung bean seeds and optimization of discharging equipment [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(12): 45-52. | |
| 5 | 刘瑞, 李衍军, 刘忠军, 等. 包衣玉米种子离散元参数分析与标定[J]. 农业机械学报, 2021, 52(3): 112-118. |
| LIU Rui, LI Yanjun, LIU Zhongjun, et al. Analysis and calibration of discrete element parameters of coated maize seed [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(3): 112-118. | |
| 6 | 温翔宇, 袁洪方, 王刚, 等. 颗粒肥料离散元仿真摩擦因数标定方法研究[J]. 农业机械学报, 2020, 51(2): 115-122, 142. |
| WEN Xiangyu, YUAN Hongfang, WANG Gang, et al. Calibration method of friction coefficient of granular fertilizer by discrete element simulation [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(2): 115-122, 142. | |
| 7 | Li H Q, Zhang G C, Li X C, et al. Calibration of the discrete element method parameters in living juvenile Manila clam (Ruditapes philippinarum) and seeding verification [J]. AgriEngineering, 2021, 3(4): 894-906. |
| 8 | LOU Y Z, ZHANG G, LI X, et al. Experiment and calibration of contact parameters of Mactra veneriformis based on DEM [J]. Computational Particle Mechanics, 2025, 12(1): 313-326. |
| 9 | 董晓威. 垂直螺旋式水稻侧深施肥机理与装置参数研究[D]. 大庆: 黑龙江八一农垦大学, 2019. |
| DONG Xiaowei. Mechanism and parameters of vertical spiral rice deep-side fertilizing device [D]. Daqing: Heilongjiang Bayi Agricultural University, 2019. | |
| 10 | 黄伟, 李秀辰, 母刚, 等. 离心式滩涂贝类播苗装置设计与试验[J]. 大连海洋大学学报, 2022, 37(2): 320-328. |
| HUANG Wei, LI Xiuchen, MU gang, et al. Design and test of a centrifugal shellfish seeding device for tidal flat aquaculture [J]. Journal of Dalian Ocean University, 2022, 37(2): 320-328. | |
| 11 | 刘彩玲, 王亚丽, 宋建农, 等. 基于三维激光扫描的水稻种子离散元建模及试验[J]. 农业工程学报, 2016, 32(15): 294-300. |
| LIU Cailing, WANG Yali, SONG Jiannong, et al. Experiment and discrete element model of rice seed based on 3D laser scanning [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(15): 294-300. | |
| 12 | 李志良. 基于点云数据的真三维建模方法研究[D]. 太原: 太原理工大学, 2014. |
| LI Zhiliang. The true 3D modeling method based on point cloud data [D]. Taiyuan: Taiyuan University of Technology, 2014. | |
| 13 | 王庚祥, 马道林, 刘洋, 等. 多体系统碰撞动力学中接触力模型的研究进展[J]. 力学学报, 2022, 54(12): 3239-3266. |
| WANG Gengxiang, MA Daolin, LIU Yang, et al. Research progress of contact force models in the collision mechanics of multibody system [J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(12): 3239-3266. | |
| 14 | 刘羊, 宗望远, 马丽娜, 等. 采用高速摄影技术测定油葵籽粒三维碰撞恢复系数[J]. 农业工程学报, 2020, 36(4): 44-53. |
| LIU Yang, ZONG Wangyuan, MA Lina, et al. Determination of three-dimensional collision restitution coefficient of oil sunflower grain by high-speed photography [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(4): 44-53. | |
| 15 | 缪雨龙, 赵毅红, 袁仨, 等. 玉米种子离散元模型建立及参数标定[J]. 江苏农业科学, 2024, 52(18): 209-214. |
| 16 | 魏雨涵, 赵丽莹. 韭菜种子物性参数测定及离散元参数标定[J]. 南方农业, 2024, 18(13): 236-240. |
| 17 | 张宏建, 陈修波, 李宏立, 等. 控释肥颗粒群仿真接触参数标定与试验[J]. 农业机械学报, 2024, 55(6): 80-90. |
| ZHANG Hongjian, CHEN Xiubo, LI Hongli, et al. Simulated contact parameters calibration and experiment of controlled-release fertilizer particles [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024,55(6): 80-90. | |
| 18 | 张国忠, 陈立明, 刘浩蓬, 等. 荸荠离散元仿真参数标定与试验[J]. 农业工程学报, 2022, 38(11): 41-50. |
| ZHANG Guozhong, CHEN Liming, LIU Haopeng, et al. Calibration and experiments of the discrete element simulation parameters for water chestnut [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(11): 41-50. | |
| 19 | 祝天荣, 田清华, 何琳, 等. 摩擦系数测试仪可靠性分析方法[J]. 机械设计与制造, 2014(5): 102-105. |
| ZHU Tianrong, TIAN Qinghua, HE Lin, et al. Methods on reliability analysis of friction coefficient test instrument [J]. Machinery Design & Manufacture, 2014(5): 102-105. | |
| 20 | 范珺. GB 10006与ASTM D 1894塑料薄膜摩擦系数测定方法的比较[J]. 中国包装, 2014, 34(5): 48-51. |
| 21 | ZHANG H B, LI P P, ZHANG H N, et al. Design and experiment of cone disk centrifugal shellfish seeding device [J]. Frontiers in Marine Science, 2023, 10: 1136844. |
| 22 | 朱惠斌, 李镕东, 白丽珍, 等. 不同含水率下水稻秸秆的离散元参数标定[J/OL]. 南京农业大学学报, 1-15[2025-03-15]. . |
| ZHU Huibin, LI Rongdong, BAI Lizhen, et al. Calibration of discrete meta-parameters of ricestraw at different water contents [J]. Journal of Nanjing Agricultural University, 1-15[2025-03-15]. . | |
| 23 | 樊成赛, 何瑞银, 施印炎, 等. 有机无机混合肥料离散元参数标定方法研究[J]. 南京农业大学学报, 2024, 47(2): 402-413. |
| FAN Chengsai, HE Ruiyin, SHI Yinyan, et al. Study on discrete element parameter calibration method for organic inorganic mixed fertilizers [J]. Journal of Nanjing Agricultural University, 2024, 47(2): 402-413. | |
| 24 | 李道亮, 刘畅. 人工智能在水产养殖中研究应用分析与未来展望[J]. 智慧农业(中英文), 2020, 2(3): 1-20. |
| LI Daoliang, LIU Chang. Recent advances and future outlook for artificial intelligence in aquaculture [J]. Smart Agriculture, 2020, 2(3): 1-20. | |
| 25 | 张志磊, 郭飞宏, 周炳洋, 等. 滩涂贝类采收设备自动驾驶滑移模型研究[J]. 智能化农业装备学报(中英文), 2025, 6(1): 81-90. |
| ZHANG Zhilei, GUO Feihong, ZHOU Bingyang, et al. Research on slip model of automatic driving of shellfish harvesting equipment in mudflat [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 81-90. |
| [1] | 吕秋辉, 朱立学, 张世昂, 陈逸鹏, 毛顺. 传感器技术在水果采摘机器人中的应用现状及趋势[J]. 智能化农业装备学报(中英文), 2025, 6(2): 58-68. |
| [2] | 王克林, 刘龙申, 陈金鑫, 李鹏, OKINDA Cedric, 沈明霞. 人工智能在畜禽养殖机器人中的应用与展望[J]. 智能化农业装备学报(中英文), 2025, 6(2): 44-57. |
| [3] | 张津国, 蔡建峰, 姜蓉蓉, 余山山, 王蓬勃. 果园作业机器人自主导航多任务联合感知方法研究[J]. 智能化农业装备学报(中英文), 2025, 6(2): 35-43. |
| [4] | 王祎娜, 王鹏军, 陈聪. 肉鸡福利养殖的发展现状与趋势[J]. 智能化农业装备学报(中英文), 2025, 6(2): 105-110. |
| [5] | 王得志, 王延鑫, 汪小旵, 施印炎, 章永年. 农业机器人中的管理与采摘技术:现状、挑战与未来发展[J]. 智能化农业装备学报(中英文), 2025, 6(2): 1-23. |
| [6] | 张志磊, 郭飞宏, 周炳洋, 徐斌, 吴昊, 母刚. 滩涂贝类采收设备自动驾驶滑移模型研究[J]. 智能化农业装备学报(中英文), 2025, 6(1): 81-90. |
| [7] | 吴擎, 韦润轩, 周乐, 杨浩, 刘婉茹, 徐红梅. 基于改进YOLOv5s的轻量化鲜茶叶识别方法[J]. 智能化农业装备学报(中英文), 2025, 6(1): 1-14. |
| [8] | 王永健, 丁想, 李骅, SAMUEL Mbugua Nyambura, 李玉青, 葛艳艳, 仇世龙, 冯学斌. 基于STM32大蒜联合收获机监测系统设计与试验[J]. 智能化农业装备学报(中英文), 2025, 6(1): 15-24. |
| [9] | 蔡家一, 刘世伟, 单龙祥, 刘勇, 沈红怡, 王巧华. 基于机器视觉与YOLO v5的裂纹蛋分拣机器人设计与试验[J]. 智能化农业装备学报(中英文), 2025, 6(1): 41-50. |
| [10] | 孙竹, 顾伟, 崔龙飞, 蔡晨, 陈晨, 周晴晴, 丁素明, 兰玉彬, 薛新宇. 智能植保装备关键技术研究现状与发展趋势[J]. 智能化农业装备学报(中英文), 2024, 5(4): 1-23. |
| [11] | 赵泽行, 吴晓鹏, 王怡馨, 闫小丽, 黄玉祥, 高筱钧. 基于知识图谱的农作物病虫害问答系统研究[J]. 智能化农业装备学报(中英文), 2024, 5(4): 39-50. |
| [12] | 马锃宏, 岳佳文, 殷程, 赵润茂, CHANDA Mulongoti, 杜小强. 基于不同拍摄角度多幅图像的果园视觉导航[J]. 智能化农业装备学报(中英文), 2024, 5(4): 51-65. |
| [13] | 赵立军, 贾云帆, 殷文科, 黄华, 李想, 李强. 基于模型预测控制的履带式除草机器人设计与试验[J]. 智能化农业装备学报(中英文), 2024, 5(4): 84-94. |
| [14] | 韦慧玲, 梁成斌, 王金海, 陈明猷, 罗陆锋. 绳驱柔性机械手研究进展及其在农业机器人中的应用[J]. 智能化农业装备学报(中英文), 2024, 5(4): 95-106. |
| [15] | 李世隆, 许辰一, 王楠, 曹慧妮, 于丰华. 基于BWO-ELM的水稻氮素无人机高光谱反演研究[J]. 智能化农业装备学报(中英文), 2024, 5(3): 14-21. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||