ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2023, Vol. 4 ›› Issue (3): 1-13.DOI: 10.12398/j.issn.2096-7217.2023.03.001
QIAN Zhenjie( ), JIN Chengqian(), LIU Zheng, YANG Tengxiang
), JIN Chengqian(), LIU Zheng, YANG Tengxiang
Received:2023-05-25
Revised:2023-08-04
Online:2023-08-15
Published:2023-08-15
Corresponding author:
JIN Chengqian
About author:QIAN Zhenjie, PhD, Associate Professor, research interests: intelligent agriculture. E-mail: zhenjieqian@caas.cn
Supported by:CLC Number:
QIAN Zhenjie, JIN Chengqian, LIU Zheng, YANG Tengxiang. Development status and trends of intelligent control technology in unmanned farms[J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 1-13.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2023.03.001

Figure 1 Schematic of unmanned farm systems

Figure 2 Integrated solutions for unmanned farms
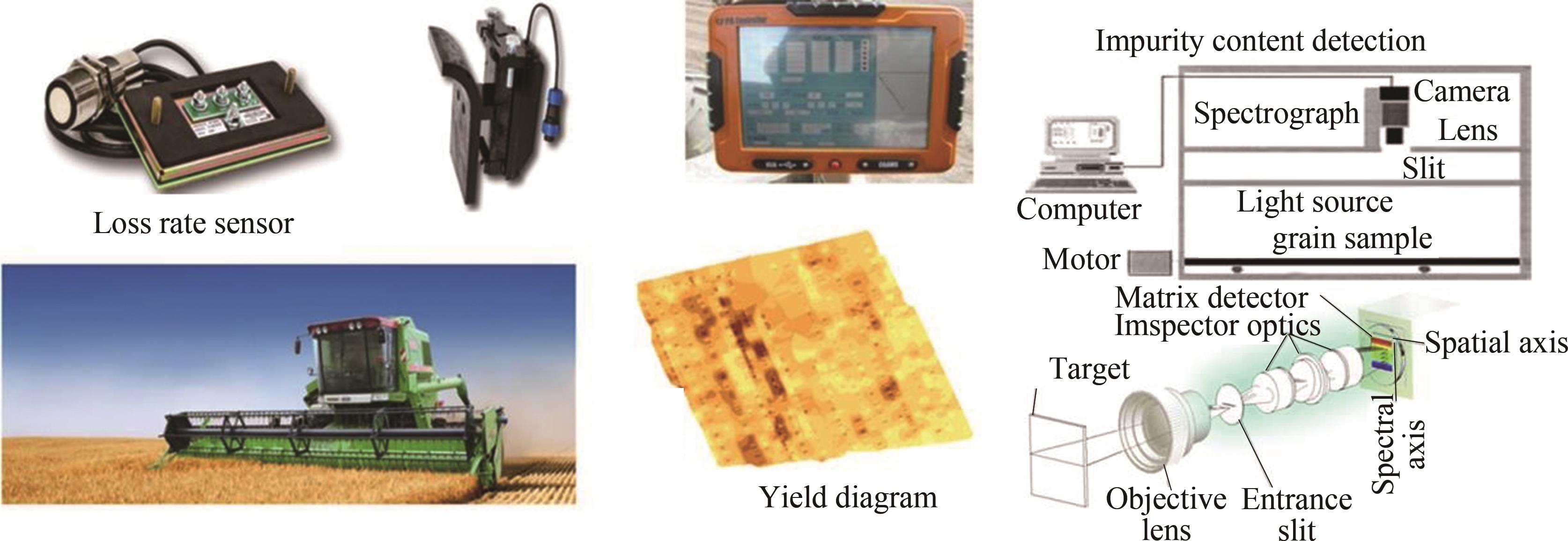
Figure 3 Loss rate sensor, impurity content sensor, and yield diagram

Figure 4 Improved Deeplabv3+ with coding layer and attention mechanism optimization

Figure 5 Intelligent soybean sensors and system for combine harvesters

Figure 6 Path planning decisions technolog

Figure 7 Multiple machines cooperative technology

Figure 8 Driverless technology

Figure 9 Agriculture machine with variable operation decision system

Figure 10 Unmanned farm intelligent management platform
| 1 | ZHANG N, WANG M, WANG N. Precision agriculture-A worldwide overview [J]. Computers and Electronics in Agriculture,2002, 36(2-3): 113-132. |
| 2 | ZHAO C J. State-of-the-art and recommended developmental strategic objectives of smart agriculture [J]. Smart Agriculture, 2019, 1(1): 1-7. |
| 3 | LIU C L, LIN H Z, LI Y M, et al. Analysis on status and development trend of intelligent control technology for agricultural equipment [J]. Transactions of the Chinese society for agricultural machinery. 2020, 51(1): 1-18. |
| 4 | LI D L, YANG H. State-of-the-art review for Internet of Things in agriculture [J]. Transactions of the Chinese society for agricultural machinery, 2018, 49(1): 1-20. |
| 5 | LAN Y B, WANG T W, CHEN S D, et al. Agricultural artificial intelligence technology: Wings of modern agricultural science and technology [J]. Journal of South China Agricultural University, 2020, 41(6): 1-13. |
| 6 | LI D L, LI Z. System analysis and development prospect of unmanned farming [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(7): 1-12. |
| 7 | LAN Y B, ZHAO D A, ZHANG Y F, et al. Exploration and development prospect of eco-unmanned farm modes [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(9): 312-327. |
| 8 | KAIZU Y, CHOI J. Development of a tractor navigation system using augmented reality [J]. Engineering in Agriculture Environment & Food, 2012, 5(3): 96-101. |
| 9 | HU J T, LI T C. Cascaded navigation control for agricultural vehicles tracking straight paths [J]. International Journal of Agricultural and Biological Engineering, 2014, 7(1): 36. |
| 10 | MALAVAZI F B P, GUYONNEAU R, FASQUEL J B, et al. LiDAR-only based navigation algorithm for an autonomous agricultural robot [J]. Computers and Electronics in Agriculture, 2018, 154: 71-79. |
| 11 | CHOI K H, HAN S K, HAN S H, et al. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields [J]. Computers and Electronics in Agriculture, 2015, 113: 266-274. |
| 12 | ZHANG Z B, LI P, ZHAO S L, An adaptive vision navigation algorithm in agricultural IoT system for smart agricultural robots [J]. Computers, Materials & Continua, 2021, 66(1): 1043-1056. |
| 13 | JIN C Q, LIU S K, CHEN M, et al. Online quality detection of machine-harvested soybean based on improved U-Net network [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(16): 70-80. |
| 14 | HIREGOUDAR S, UDHAYKUMAR R, RAMAPPA K T, et al. Artificial neural network for assessment of grain losses for paddy combine harvester a novel approach [C]// International Conference on Logis, Information, Control and Computation, 2011. |
| 15 | ZHANG Q, HU J P, XU L Z, et al. Impurity/breakage assessment of vehicle-mounted dynamic rice grain flow on combine harvester based on improved Deeplabv3 and YOLOv4 [J]. IEEE Access, 2023(11): 49273-49288. |
| 16 | JIN C Q, CAI Z Y, NI Y L, et al. Research review on online grain yield monitoring for combine harvester: Yield sensing, yield mapping and dynamic model [J]. Journal of China Agricultural University, 2020, 25(7): 137-152. |
| 17 | SILVA L L G DA, ALVES L G, TOTH A, et al. Development of an impact-based yield monitor with CAN bus [J]. Sensor Letters, 2011,9(3): 974-980. |
| 18 | HU J W, LUO X W, RUAN H, et al. Design of a dual-plate differential impact-based yield sensor [J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(4): 69-72. |
| 19 | YANG G, LEI J B, LIU C L, et al. Development of yield monitoring system with high-precision based on linear structured light source and machine vision [J]. Transactions of the CSAE, 2019, 35(8): 29-36. |
| 20 | JIN C Q, CAI Z Y, YANG T X, et al. Design and experiment of yield monitoring system of grain combine harvester [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(5): 125-135. |
| 21 | RAJABI-VANDECHALI M, ABBASPOUR-FARD M H, ROHANI A. Development of a prediction model for estimating tractor engine torque based on soft computing and low cost sensors [J]. Measurement, 2018, 121: 83-95. |
| 22 | SUN H, LI S, LI M Z, et al. Research progress of image sensing and deep learning in agriculture [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020(5): 1-17. |
| 23 | DVORAK J S. Object detection for agricultural and construction environments using an ultrasonic sensor [J]. Journal of Agricultural Safety & Health, 2016, 22(2): 107-119. |
| 24 | DIEGO C, HERNÁNDEZ A, JIMÉNEZ A, et al. Ultrasonic array for obstacle detection based on CDMA with Kasami codes [J]. Sensors, 2011, 11(12): 11464-11475. |
| 25 | MAIER D, STACHNISS C, BENNEWITZ M. Vision-based humanoid navigation using self-supervised obstacle detection [J]. International Journal of Humanoid Robotics, 2013, 10(2): 1350016. |
| 26 | DING X. Obstacles detection algorithm in forest based on multi-sensor data fusion [J]. Journal of Multimedia, 2013, 8(6): 108-117. |
| 27 | XU H Z, LI S C, JI Yuhan, et al. Dynamic obstacle detection based on panoramic vision in the moving state of agricultural machineries [J]. Computers and Electronics in Agriculture, 2021, 184: 106104. |
| 28 | KAREN L. A decision-support system for analyzing tractor guidance technology [J]. Computers and Electronics in Agriculture, 2018, 153: 115-125. |
| 29 | HAMEED I A. Intelligent coverage path planning for agricultural robots and autonomous machines on three-dimensional terrain [J]. Journal of Intelligent & Robotic Systems, 2014, 74: 3-4. |
| 30 | JING Y P, LUO C M, LIU G. Multiobjective path optimization for autonomous land levelling operations based on an improved MOEA/D-ACO [J]. Computers and Electronics in Agriculture, 2022, 197: 106995. |
| 31 | MENG Z J, LIU H, WANG Hua, et al. Optimal path planning for agricultural machinery[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 147-152. |
| 32 | ZHANG C, NOGUCHI N. Development of a multi-robot tractor system for agriculture field work[J]. Computers and Electronics in Agriculture, 2017, 142: 79 -90. |
| 33 | CAO R Y, LI S C, JI Y H, et al. Multi-machine cooperation task planning based on ant colony algorithm [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(Supp1): 34-39. |
| 34 | BAI X P, WANG Z, HU J T, et al. Harvester group corporative navigation method based on leader-follower structure [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 14-21. |
| 35 | GONG J L, WANG W, ZHANG Y F, et al. Cooperative working strategy for agricultural robot groups based on farmland environment [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(2): 11-19. |
| 36 | KAIVOSOJA J, PESONEN L, KLEEMOLA J, et al. A case study of a precision fertilizer application task generation for wheat based on classified hyperspectral data from UAV combined with farm history data [C]// Remote Sensing for Agriculture, Ecosystems, and Hydrology XV. International Society for Optics and Photonics, 2013. |
| 37 | MENG Z J, ZHAO J, LIU H, et al. Development and performance assessment of map-based variable rate granule application system [J]. Journal of Jiangsu University (Natural Science Edition), 2009, 30 (4): 338-342. |
| 38 | WEI X H, JIANG S, ZHANG J M, et al. Application rate control characteristics of blended pulse variable rate application system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 87-92, 86. |
| 39 | YUAN Y W, LI S J, FANG X F, et al. Decision support system of N, P and K ratio fertilization [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(8): 240-244, 223. |
| [1] | Mengyuan LU, Tianyi WANG, Xinchang CHEN, Yuzhuo ZHANG, Zeqi GONG, Xingshan ZHANG. Simulation research on cooperative flight model of UAV formation based on ROS and PX4 [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 32-41. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||