ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2023, Vol. 4 ›› Issue (3): 32-41.DOI: 10.12398/j.issn.2096-7217.2023.03.004
Previous Articles Next Articles
LU Mengyuan1( ), WANG Tianyi1,2(), CHEN Xinchang3, ZHANG Yuzhuo1, GONG Zeqi4, ZHANG Xingshan1
), WANG Tianyi1,2(), CHEN Xinchang3, ZHANG Yuzhuo1, GONG Zeqi4, ZHANG Xingshan1
Received:2023-05-12
Revised:2023-07-24
Online:2023-08-15
Published:2023-08-15
Corresponding author:
WANG Tianyi
LU Mengyuan, WANG Tianyi, CHEN Xinchang, ZHANG Yuzhuo, GONG Zeqi, ZHANG Xingshan. Simulation research on cooperative flight model of UAV formation based on ROS and PX4[J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 32-41.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2023.03.004
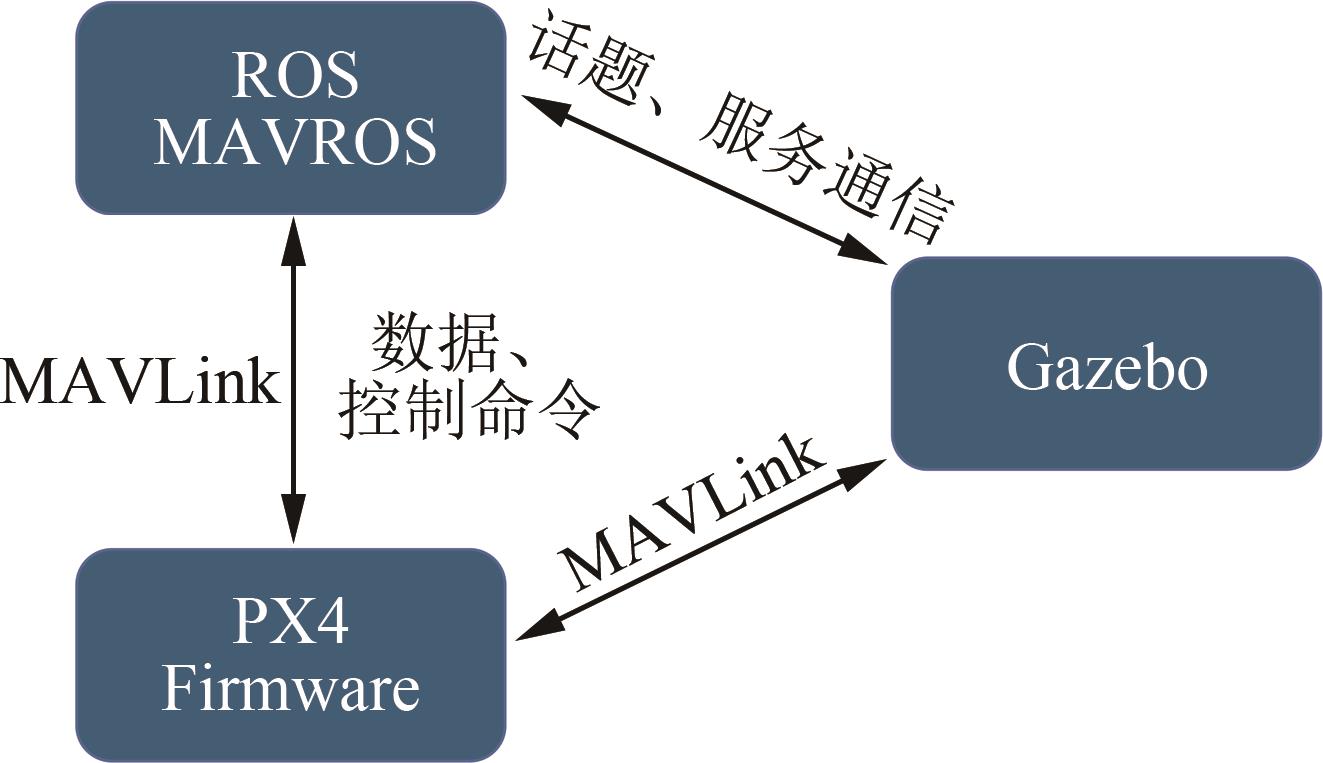
Figure 1 Information exchange between ROS, PX4, and Gazebo

Figure 2 Multi-rotary-wing UAV individual and formation 3D-model
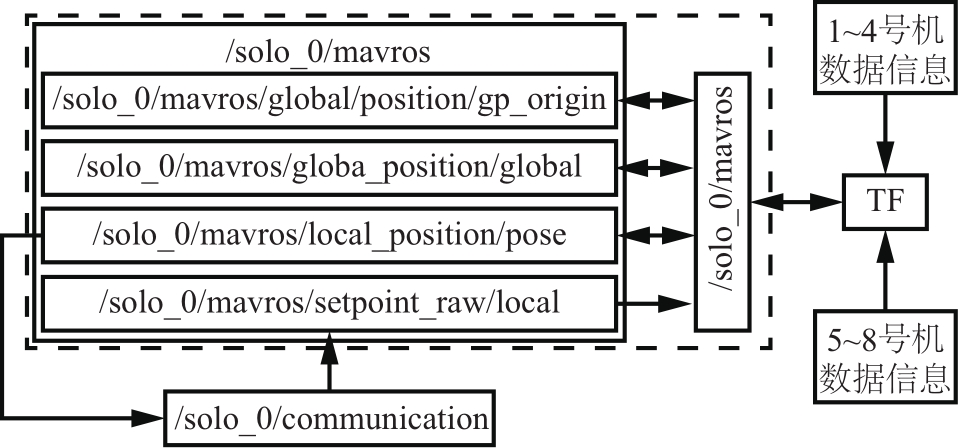
Figure 3 Flight control information exchange among drones in a swarm

Figure 4 Transmission of pose information between receiving and processing modules

Figure 5 Communication script optimization logic
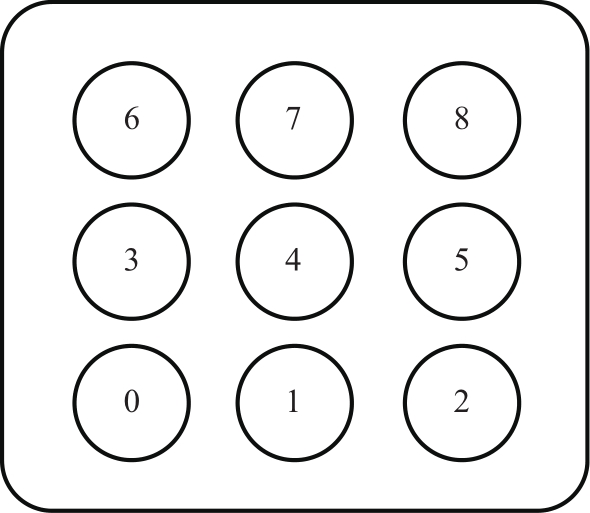
Figure 6 The numbering sequence and relative positions of the UAV formation
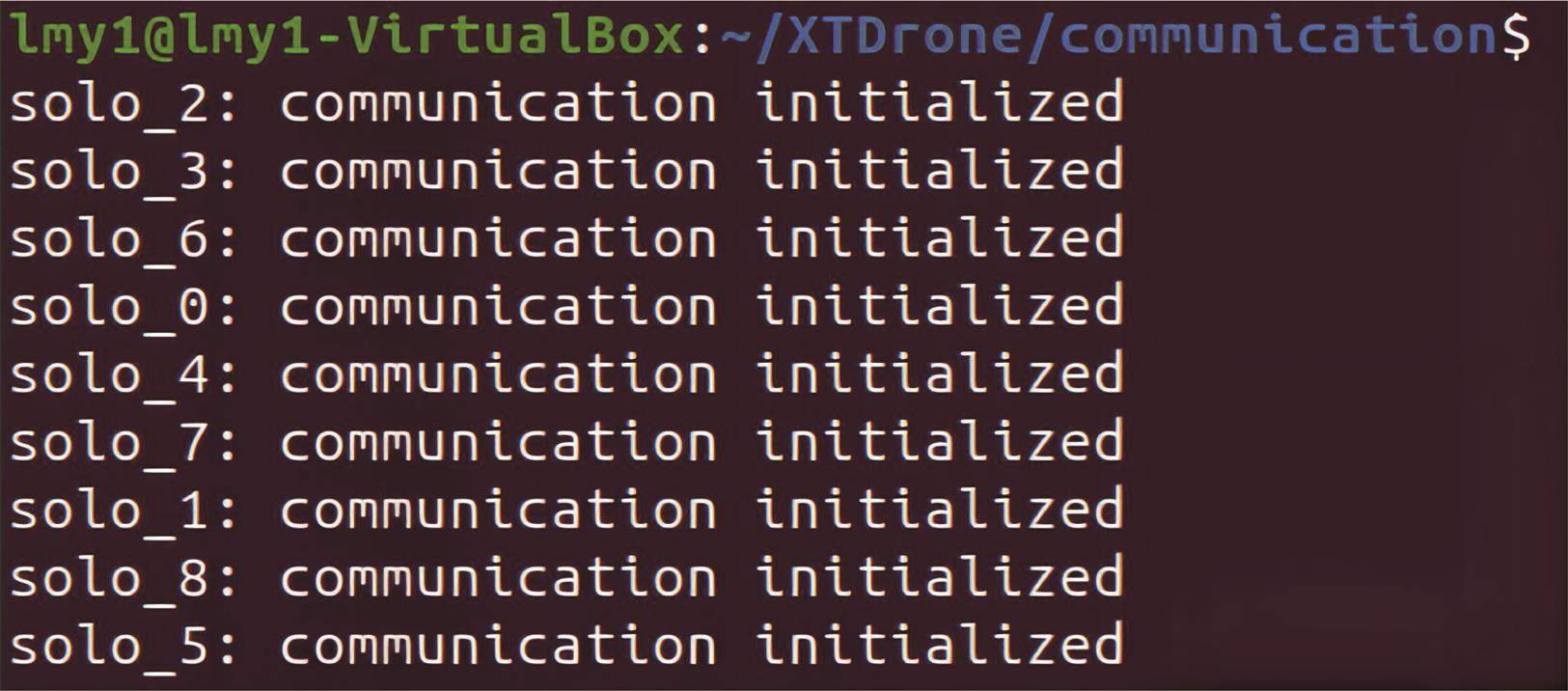
Figure 7 Communication connection results between unmanned aerial vehicles within the formation
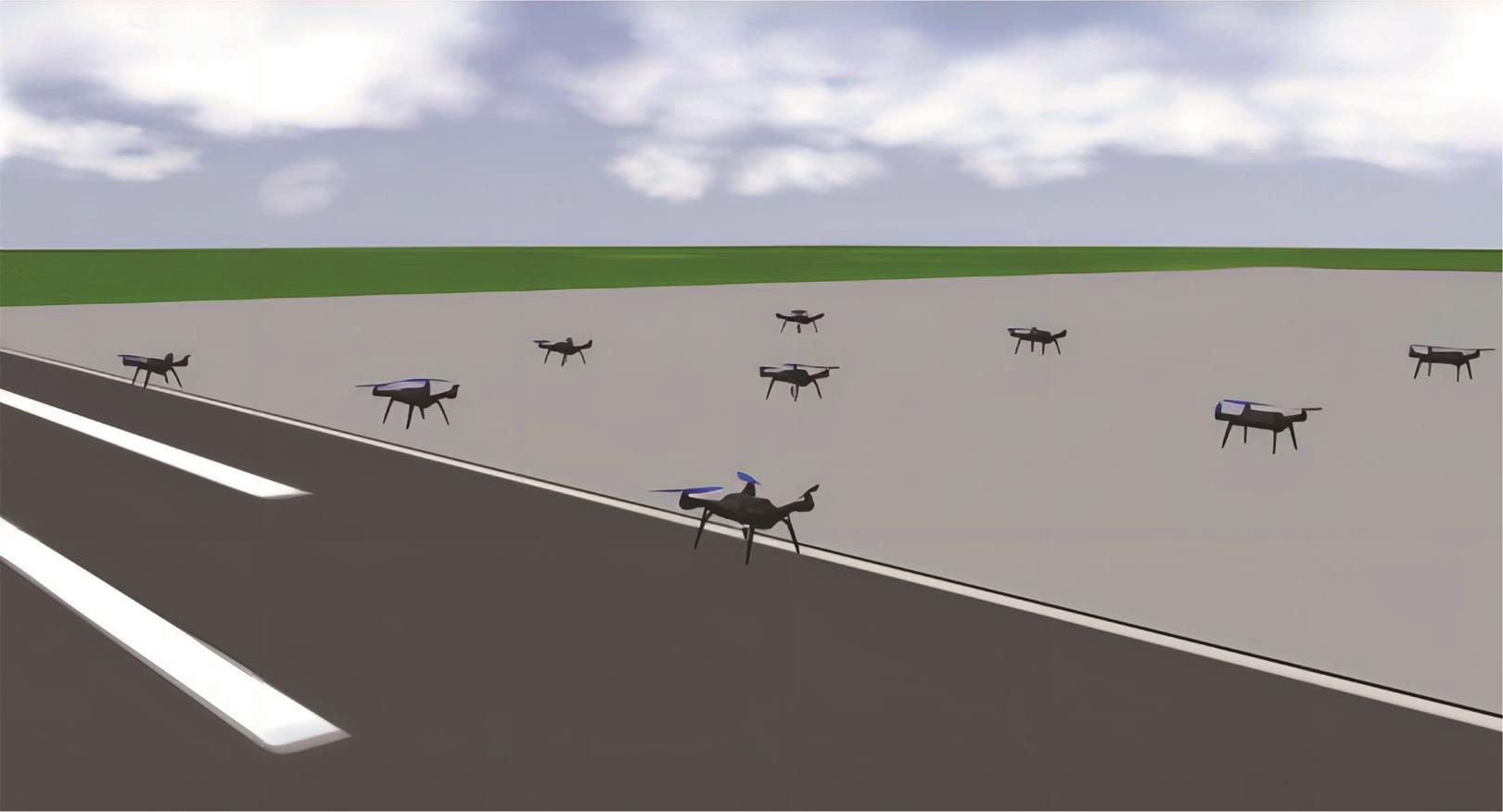
Figure 8 Autonomous formation flight and hovering of UAVs
| 无人机序号 | 起飞坐标/(m,m,m) | 悬停坐标/(m,m,m) | 相对误差/m | ||
|---|---|---|---|---|---|
| 理论 | 实际 | 理论 | 实际 | ||
| 0 | (0,3,0) | (-0.060 392,2.977 764,-0.013 842) | (1,4,1) | (0.942 345,3.817 296,1.003 825) | 0.728 7 |
| 1 | (3,3,0) | (2.939 607 8,2.975 464 2,-0.016 522) | (4,4,1) | (3.942 397,3.817 322,1.004 061) | 0.881 6 |
| 2 | (6,3,0) | (5.939 607 8,2.977 634 2,-0.010 212) | (7,4,1) | (6.942 307,3.817 346,1.004 202) | 0.728 4 |
| 3 | (0,6,0) | (-0.060 392,5.977 764,-0.022 335) | (1,7,1) | (0.942 635,6.817 450,1.004 241) | 0.728 9 |
| 4 | (3,6,0) | (2.947 156 8,5.977 764 1,-0.018 215) | (4,7,1) | (3.943 414,6.817 608,1.004 388) | 0.881 3 |
| 5 | (6,6,0) | (5.947 156 8,5.988 882 0,-0.014 615) | (7,7,1) | (6.943 964,6.817 801,1.004 354) | 0.728 2 |
| 6 | (0,9,0) | (-0.052 843,8.988 882,-0.020 038) | (1,10,1) | (0.944 340,9.818 012,1.004 124 3) | 0.729 7 |
| 7 | (3,9,0) | (2.947 156 8,8.988 882,-0.014 728) | (4,10,1) | (3.944 579,9.818 174,1.003 569) | 0.881 3 |
| 8 | (6,9,0) | (5.947 156 8,8.988 882,-0.014 638) | (7,10,1) | (6.944 666,9.818 325,1.002 841) | 0.728 2 |
Table 1 Experimental results and comparison of autonomous navigation
| 无人机序号 | 起飞坐标/(m,m,m) | 悬停坐标/(m,m,m) | 相对误差/m | ||
|---|---|---|---|---|---|
| 理论 | 实际 | 理论 | 实际 | ||
| 0 | (0,3,0) | (-0.060 392,2.977 764,-0.013 842) | (1,4,1) | (0.942 345,3.817 296,1.003 825) | 0.728 7 |
| 1 | (3,3,0) | (2.939 607 8,2.975 464 2,-0.016 522) | (4,4,1) | (3.942 397,3.817 322,1.004 061) | 0.881 6 |
| 2 | (6,3,0) | (5.939 607 8,2.977 634 2,-0.010 212) | (7,4,1) | (6.942 307,3.817 346,1.004 202) | 0.728 4 |
| 3 | (0,6,0) | (-0.060 392,5.977 764,-0.022 335) | (1,7,1) | (0.942 635,6.817 450,1.004 241) | 0.728 9 |
| 4 | (3,6,0) | (2.947 156 8,5.977 764 1,-0.018 215) | (4,7,1) | (3.943 414,6.817 608,1.004 388) | 0.881 3 |
| 5 | (6,6,0) | (5.947 156 8,5.988 882 0,-0.014 615) | (7,7,1) | (6.943 964,6.817 801,1.004 354) | 0.728 2 |
| 6 | (0,9,0) | (-0.052 843,8.988 882,-0.020 038) | (1,10,1) | (0.944 340,9.818 012,1.004 124 3) | 0.729 7 |
| 7 | (3,9,0) | (2.947 156 8,8.988 882,-0.014 728) | (4,10,1) | (3.944 579,9.818 174,1.003 569) | 0.881 3 |
| 8 | (6,9,0) | (5.947 156 8,8.988 882,-0.014 638) | (7,10,1) | (6.944 666,9.818 325,1.002 841) | 0.728 2 |
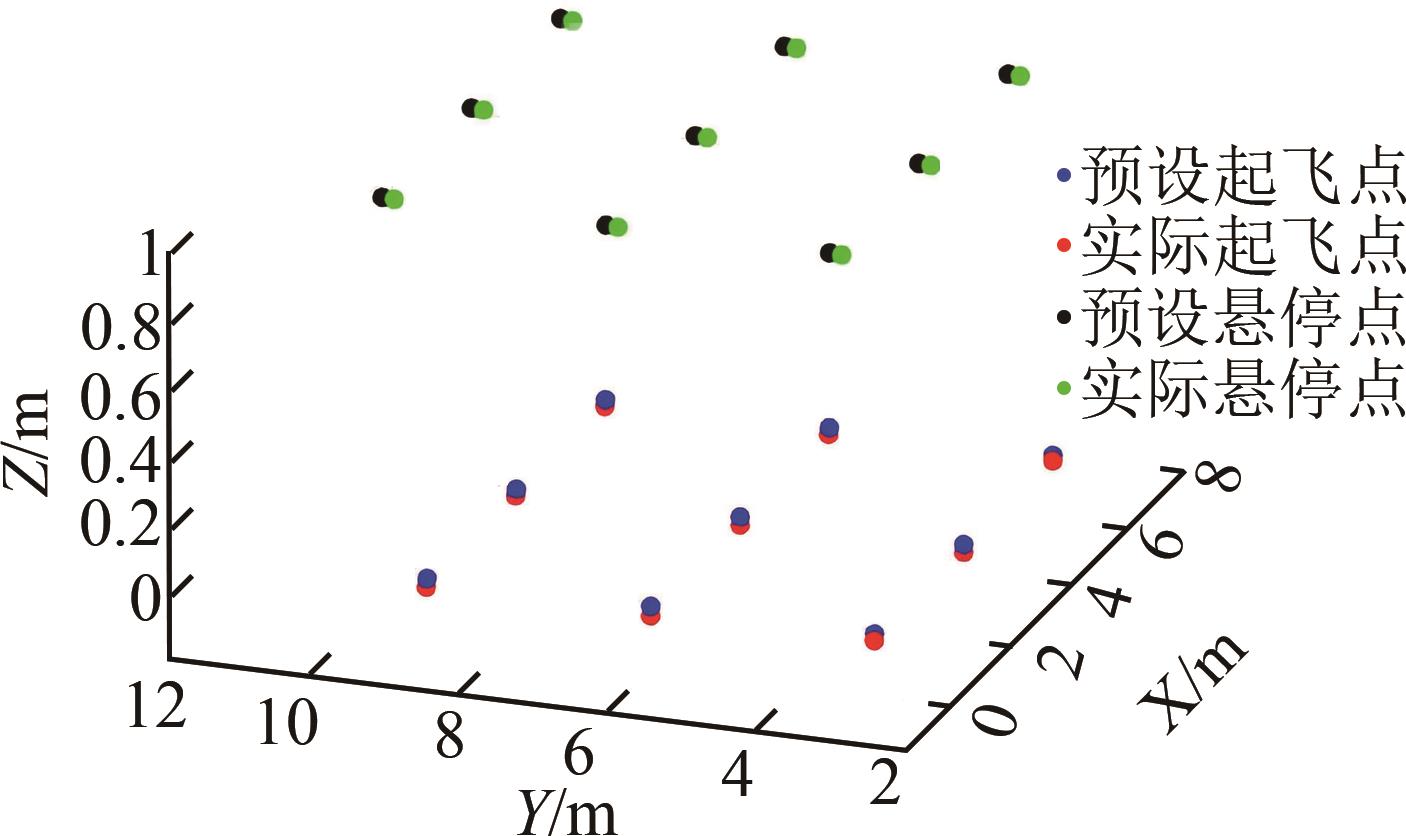
Figure 9 Illustration of targets and actual positions before and after drone formation flight
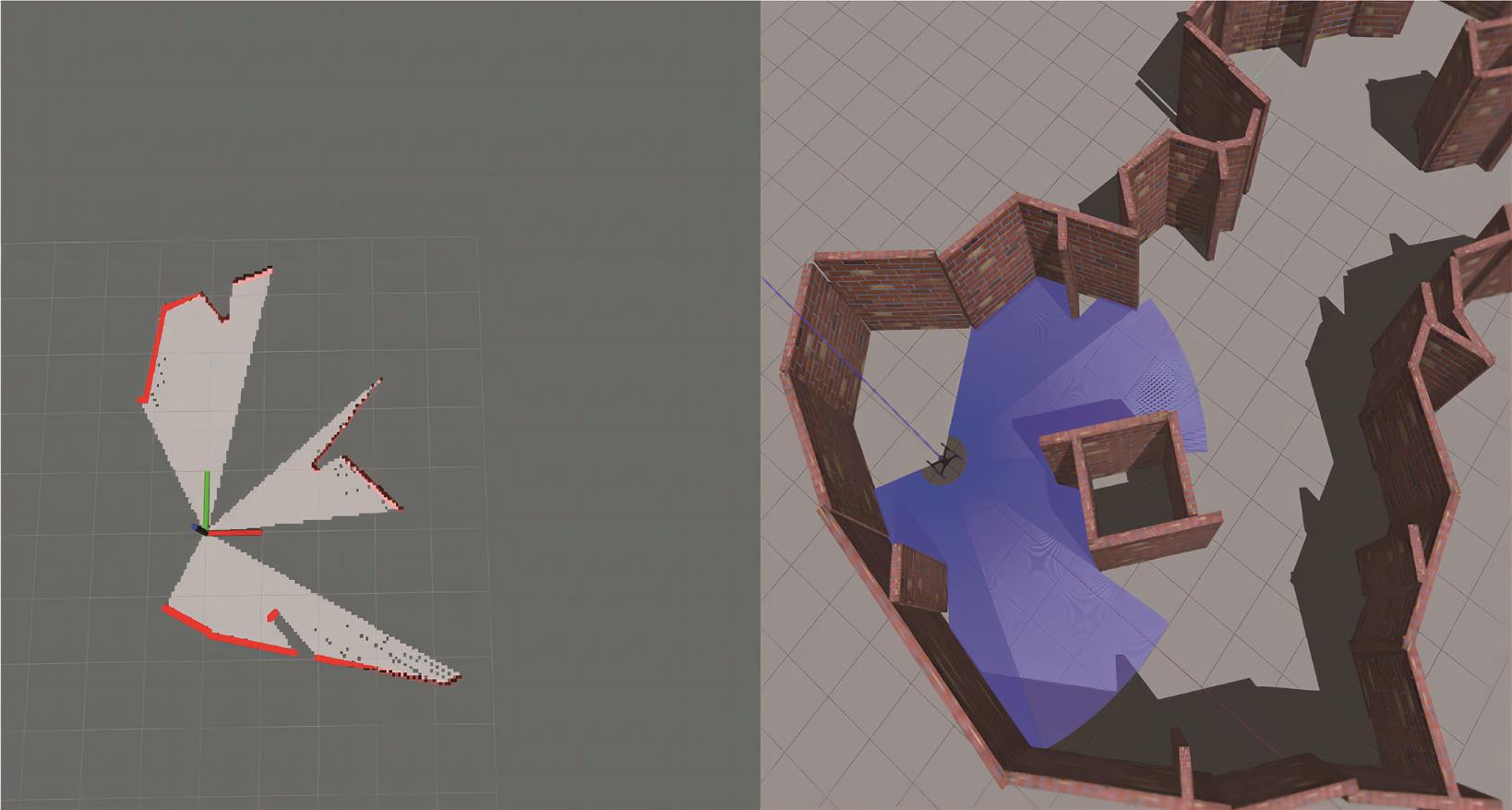
Figure 10 Map construction based on 2D laser SLAM
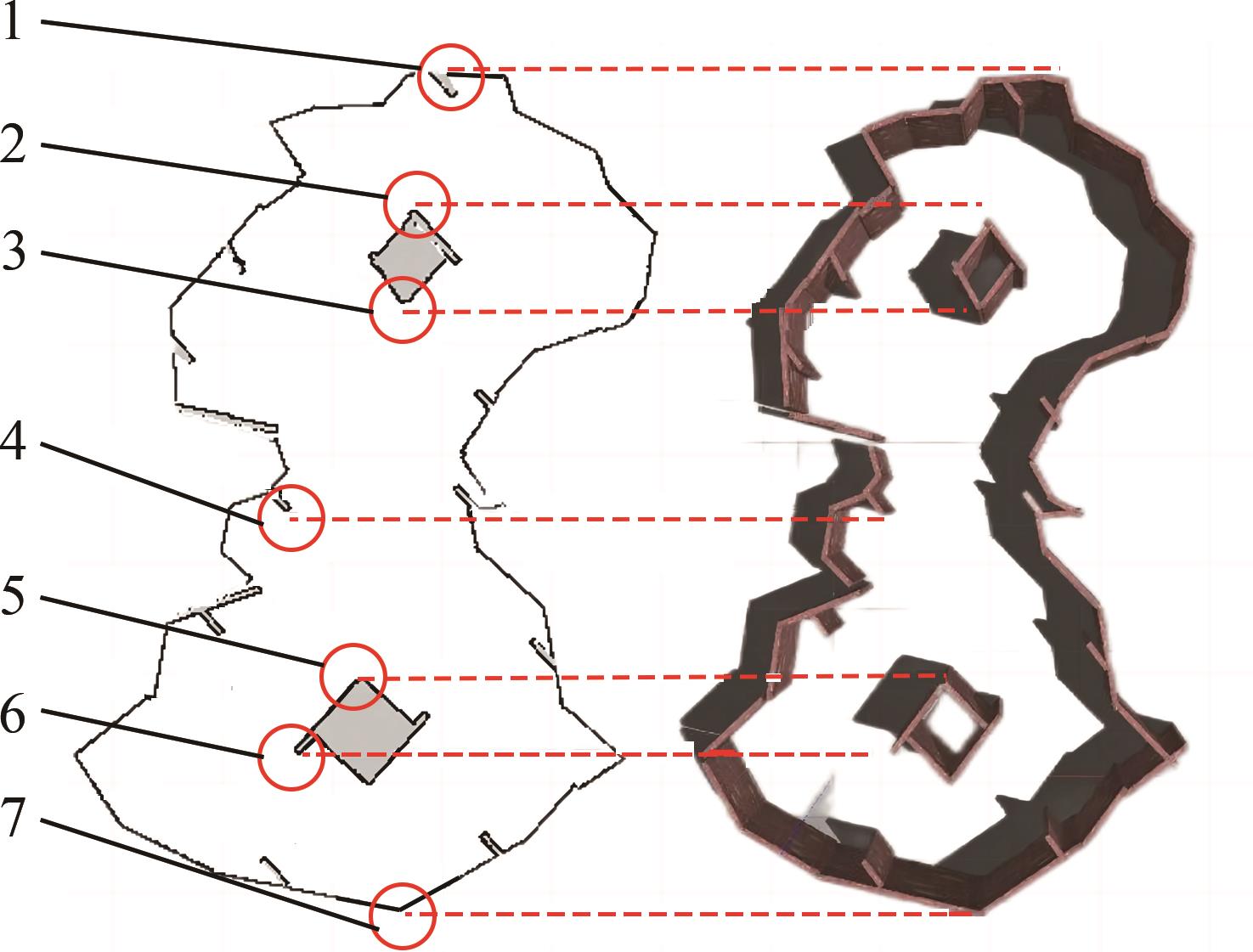
Figure 11 Comparison between 2D linear maps and 3D top view maps
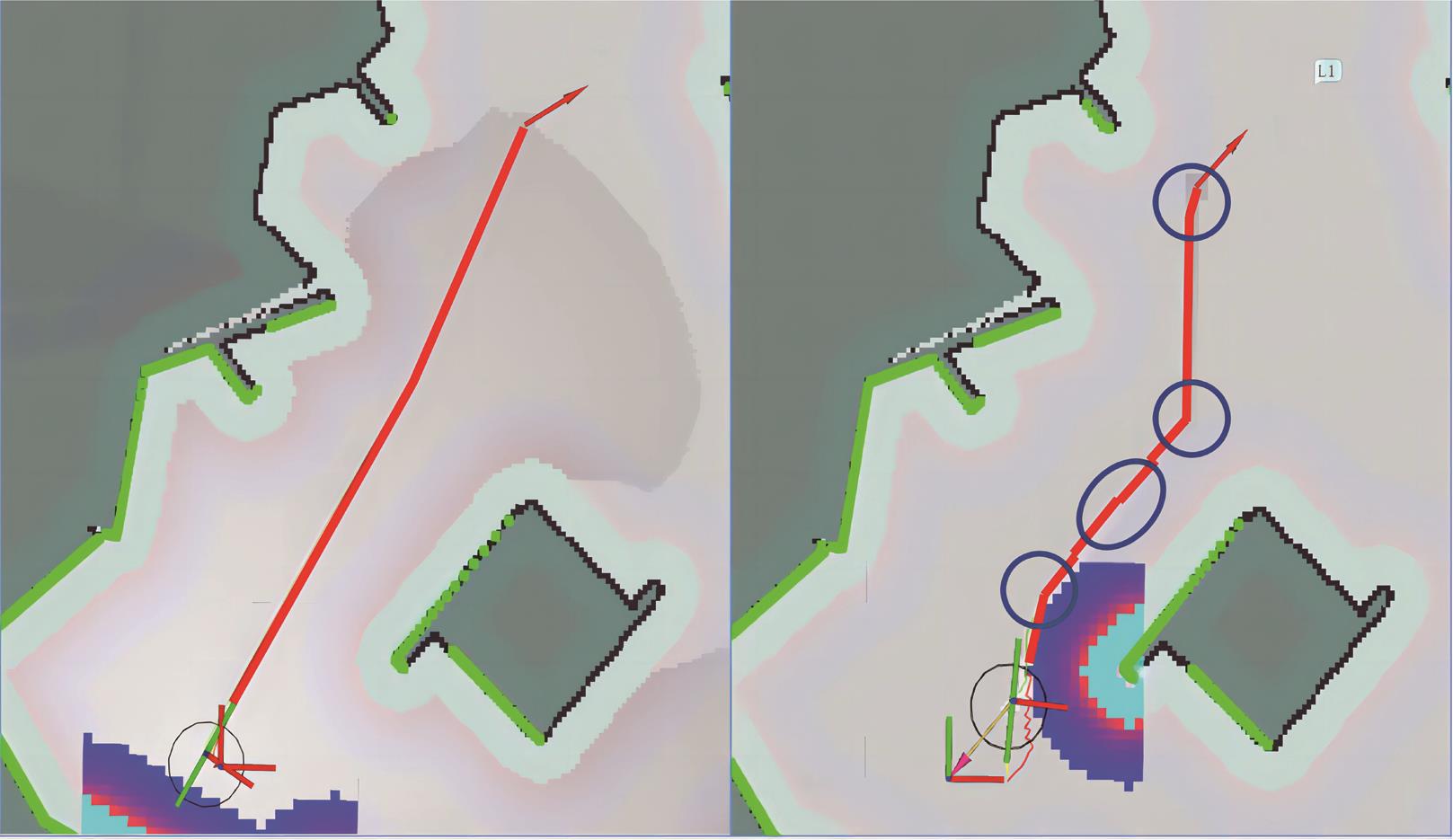
Figure 12 Comparison of Dijkstra and A* algorithms for pathfinding

Figure 13 Autonomous flight navigation based on global map
| 目标航点序号 | 目标位置坐标/m | 实际位置坐标/m | 预期累计飞行距离/m | 累计飞行误差/m |
|---|---|---|---|---|
| 1 | (3.5,4,1) | (3.455 083,4.321 457,0.917 043) | 5.32 | 0.335 004 |
| 2 | (3.5,8,1) | (3.376 038,7.255 361,1.267 812) | 9.32 | 0.513 196 |
| 3 | (5,9,1) | (4.503 481,9.331 964,0.827 435) | 11.05 | 0.827 949 |
| 4 | (3,6,1) | (2.502 856,6.342 934,0.829 316) | 14.79 | 0.829 532 |
| 5 | (3,9,1) | (2.502 680,9.365 054,0.833 430) | 17.79 | 0.832 552 |
| 6 | (2,12,1) | (1.942 875,12.825 011,1.325 381) | 20.95 | 0.884 961 |
| 7 | (4,11,1) | (4.302 737,11.348 236,0.960 427) | 23.19 | 0.960 230 |
| 8 | (9,13,1) | (8.186 833,13.675 290,1.191 437) | 28.58 | 0.977 177 |
| 9 | (6,10,1) | (5.791 630,10.293 263,1.877 684) | 32.82 | 1.017 770 |
| 10 | (6,15,1) | (4.581 583,14.006 248,0.978 429) | 37.82 | 1.432 636 |
Table 2 Dominant navigation experiment results
| 目标航点序号 | 目标位置坐标/m | 实际位置坐标/m | 预期累计飞行距离/m | 累计飞行误差/m |
|---|---|---|---|---|
| 1 | (3.5,4,1) | (3.455 083,4.321 457,0.917 043) | 5.32 | 0.335 004 |
| 2 | (3.5,8,1) | (3.376 038,7.255 361,1.267 812) | 9.32 | 0.513 196 |
| 3 | (5,9,1) | (4.503 481,9.331 964,0.827 435) | 11.05 | 0.827 949 |
| 4 | (3,6,1) | (2.502 856,6.342 934,0.829 316) | 14.79 | 0.829 532 |
| 5 | (3,9,1) | (2.502 680,9.365 054,0.833 430) | 17.79 | 0.832 552 |
| 6 | (2,12,1) | (1.942 875,12.825 011,1.325 381) | 20.95 | 0.884 961 |
| 7 | (4,11,1) | (4.302 737,11.348 236,0.960 427) | 23.19 | 0.960 230 |
| 8 | (9,13,1) | (8.186 833,13.675 290,1.191 437) | 28.58 | 0.977 177 |
| 9 | (6,10,1) | (5.791 630,10.293 263,1.877 684) | 32.82 | 1.017 770 |
| 10 | (6,15,1) | (4.581 583,14.006 248,0.978 429) | 37.82 | 1.432 636 |
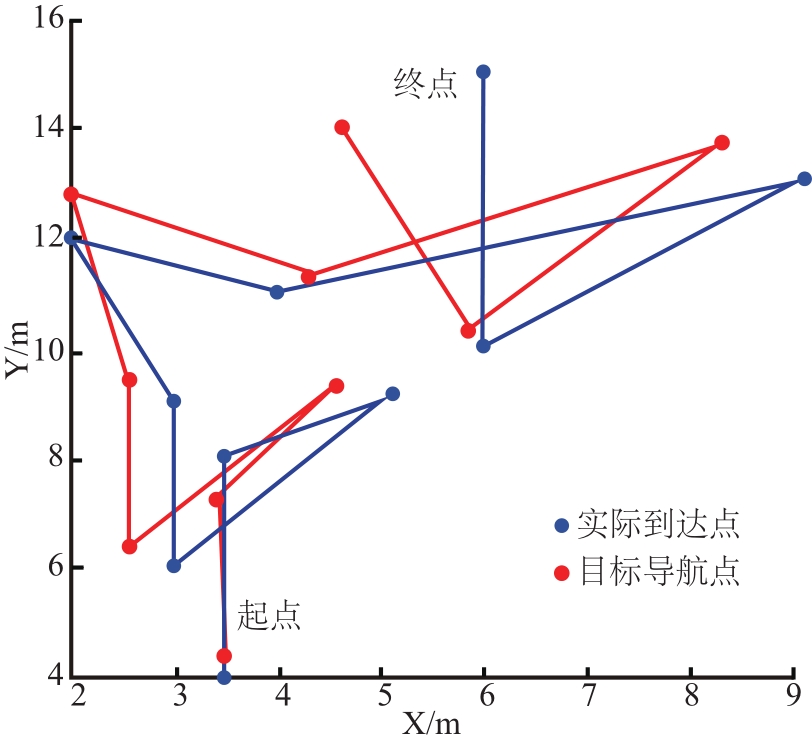
Figure 14 Comparison graph of the desired and actual two-dimensional routes to the target point
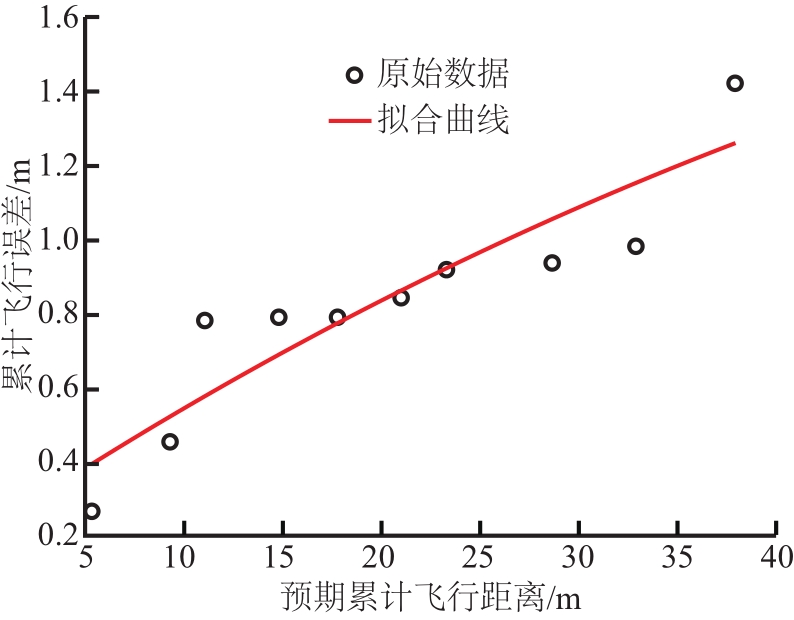
Figure 15 Scatter plot of accumulated flight distance and accumulated error with a fitted line
| 1 | 谷旭平, 唐大全, 唐管政. 无人机编队协同导航研究现状及进展[J]. 舰船电子工程, 2021, 41(7): 28-33. |
| GU Xuping, TANG Daquan, TANG Guanzheng. Research status and progress of UAV formation cooperative navigation [J]. Ship Electronic Engineering, 2021, 41(7): 28-33. | |
| 2 | 李鹏举, 毛鹏军, 耿乾, 等. 无人机集群技术研究现状与趋势[J]. 航空兵器, 2020, 27(4): 25-32. |
| LI Pengju, MAO Pengjun, GENG Qian, et al. Research status and trend of UAV swarm technology [J]. Aero Weaponry, 2020, 27(4): 25-32. | |
| 3 | 戴大伟, 龙海英. 无人机发展与应用[J]. 指挥信息系统与技术, 2013, 4(4): 7-10. |
| DAI Dawei, LONG Haiying. Development and application of unmanned aerial vehicle [J]. Command Information System and Technology, 2013, 4(4): 7-10. | |
| 4 | 宗群, 王丹丹, 邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学报, 2017, 49(3): 1-14. |
| ZONG Qun, WANG Dandan, SHAO Shikai, et al. Research status and development of multi UAV coordinated formation flight control [J]. Journal of Harbin Institute of Technology, 2017, 49(3): 1-14. | |
| 5 | 夏天. 基于激光2D-SLAM的地图构建算法研究[D]. 杭州: 杭州电子科技大学, 2020. |
| XIA Tian. Research on mapping algorithm based on laser 2D-SLAM [D]. Hangzhou: Hangzhou Dianzi University, 2020. | |
| 6 | LIU Y Y, MONTENBRUCK J M, ZELAZO D, et al. A distributed control approach to formation balancing and maneuvering of multiple multirotor UAVs [J]. IEEE Transactions on Robotics, 2018, 34(4): 870-882. |
| 7 | 成成. 多无人机协同编队飞行控制关键技术研究[D]. 长春: 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2018. |
| CHENG Cheng. Research on key technologies for collaborative formation flight control of multiple unmanned aerial vehicles [D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2018. | |
| 8 | 赵伟伟. 无人机集群编队及其避障控制关键技术研究[D]. 长春: 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2020. |
| ZHAO Weiwei. Research on key technologies of UAV flocking formation and obstacle avoidance control [D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2020. | |
| 9 | 张迪, 刘婷婷, 宋家友. 基于动态规划的无人机编队最优协同容错控制[J]. 电光与控制, 2023, 30(4): 34-39. |
| ZHANG Di, LIU Tingting, SONG Jiayou. Optimal cooperative fault-tolerant control of UAV formation based on dynamic programming [J]. Electronics Optics & Control, 2023, 30(4): 34-39. | |
| 10 | 贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41(S1): 4-14. |
| JIA Yongnan, TIAN Siying, LI Qing. Development of unmanned aerial vehicle swarms [J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 4-14. | |
| 11 | 刘钢, 汤俊, 刘陈, 等. 无人飞行器集群协同行为建模技术综述[J]. 系统工程与电子技术, 2021, 43(8): 2221-2231. |
| LI Gang, TANG Jun, LIU Chen, et al. Survey of cooperative behavior modeling technology for unmanned aerial vehicles clusters [J]. Systems Engineering and Electronics, 2021, 43(8): 2221-2231. | |
| 12 | 邹立岩, 张明智, 柏俊汝, 等. 无人机集群作战建模与仿真研究综述[J]. 战术导弹技术, 2021(3): 98-108. |
| ZOU Liyan. ZHANG Mingzhi. BAI Junru,et al. A survey of modeling and simulation of UAS swarm operation [J]. Tactical Missile Technology, 2021(3): 98-108. | |
| 13 | ALÁEZ D, OLAZ X, PRIETO M, et al. HIL flight simulator for VTOL-UAV pilot training using X-Plane [J]. Information, 2022, 13(12): 585. |
| 14 | 丁中涛. 基于ROS的无人机自主降落技术研究[D]. 成都: 成都理工大学, 2020. |
| DING Zhongtao. Research on autonomous landing of UAV based on ROS [D]. Chengdu: Chengdu University of Technology, 2020. | |
| 15 | XIAO K, MA L, TAN S, et al. Implementation of UAV coordination based on a hierarchical multi-UAV simulation platform [C]//Advances in Guidance, Navigation and Control: Proceedings of 2020 International Conference on Guidance, Navigation and Control, ICGNC 2020, Tianjin, China, October 23—25, 2020. Springer Singapore, 2022: 5131-5143. |
| 16 | 胡新雨, 马澜, 肖昆, 等. 基于XTDrone的无人机集群协同搜索仿真系统[J]. 机器人技术与应用, 2022(5): 25-28. |
| HU Xinyu, MA Lan, XIAO Kun, et al. A UAV cluster collaborative search simulation system based on XTDrone [J]. Robot Technique and Application, 2022(5): 25-28. | |
| 17 | 孙翔龙, 梁彦刚. 基于Gazebo和PX4的强化学习训练仿真环境接口设计与实现[J]. 电子技术与软件工程, 2022(5): 68-71. |
| SUN Xianglong. LIANG Yangang. Design and implementation of reinforcement learning training simulation environment interface based on Gazebo and PX4 [J]. Electronic Technology & Software Engineering, 2022(5): 68-71. | |
| 18 | 刘书林. 四旋翼无人机编队飞行的控制策略研究[D]. 哈尔滨: 哈尔滨工业大学, 2016. |
| LIU Shulin. Study on formation control strategy for quad rotors [D]. Harbin: Harbin Institute of Technology, 2016. | |
| 19 | 王超. 基于ROS的移动机器人全遍历路径规划研究[D]. 南昌: 南昌大学, 2022. |
| WANG Chao. Research on full traversal path planning of mobile robot based on ROS [D]. Nanchang: Nanchang University, 2022. | |
| 20 | 王岸雄. 基于ROS的自主移动机器人环境建模和路径规划研究[D]. 西安: 西安理工大学, 2020. |
| WANG Anxiong. Research on environment modeling and path planning of autonomous mobile robot based on ROS [D]. Xi’an: Xi’an University of Technology, 2020. | |
| 21 | 王洪斌, 郝策, 张平, 等. 基于A*算法和人工势场法的移动机器人路径规划[J]. 中国机械工程, 2019, 30(20): 2489-2496. |
| WANG Hongbin, HAO Ce, ZHANG Ping, et al. Path planning of mobile robots based on A* algorithm and artificial potential field algorithm [J]. China Mechanical Engineering, 2019, 30(20): 2489-2496. | |
| 22 | 李晓旭, 马兴录, 王先鹏. 移动机器人路径规划算法综述[J]. 计算机测量与控制, 2022, 30(7): 9-19. |
| LI Xiaoxu, MA Xinglu, WANG Xianpeng. A survey of path planning algorithms for mobile robots [J]. Computer Measurement & Control, 2022, 30(7): 9-19. |
| [1] | QIAN Zhenjie, JIN Chengqian, LIU Zheng, YANG Tengxiang. Development status and trends of intelligent control technology in unmanned farms [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 1-13. |
| [2] | CUI Xinyu, CUI Bingbo, MA Zhen, HAN Yi, ZHANG Jianxin, WEI Xinhua. Integration of geometric-based path tracking controller and its application in agricultural machinery automatic navigation [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 24-31. |
| [3] | Zhang Lei, Liu Yiting, Chen Guangming, Li Peijuan. Research on navigation and rectification of inspection robot based on ultrasonic sensor [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(2): 64-70. |
| [4] | Zhang Longmei, Liu Gangwei, Qi Yandong, Yang Tengxiang, Jin Chengqian. Research progress on key technologies of agricultural machinery unmanned driving system [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(1): 27-36. |
| [5] | Xiwen Luo. Artificial intelligence and plant protection mechanization [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2020, 1(1): 1-6. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||