ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2025, Vol. 6 ›› Issue (2): 58-68.DOI: 10.12398/j.issn.2096-7217.2025.02.005
Previous Articles Next Articles
LÜ Qiuhui1( ), ZHU Lixue1,2(), ZHANG Shi'ang1, CHEN Yipeng1, MAO Shun1
), ZHU Lixue1,2(), ZHANG Shi'ang1, CHEN Yipeng1, MAO Shun1
Received:2025-03-13
Revised:2025-04-18
Online:2025-05-15
Published:2025-05-20
Corresponding author:
ZHU Lixue
About author:LÜ Qiuhui, E-mail: 137637519@qq.com
Supported by:CLC Number:
LÜ Qiuhui, ZHU Lixue, ZHANG Shi'ang, CHEN Yipeng, MAO Shun. Application status and trends of sensor technology in fruit picking robots[J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 58-68.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2025.02.005
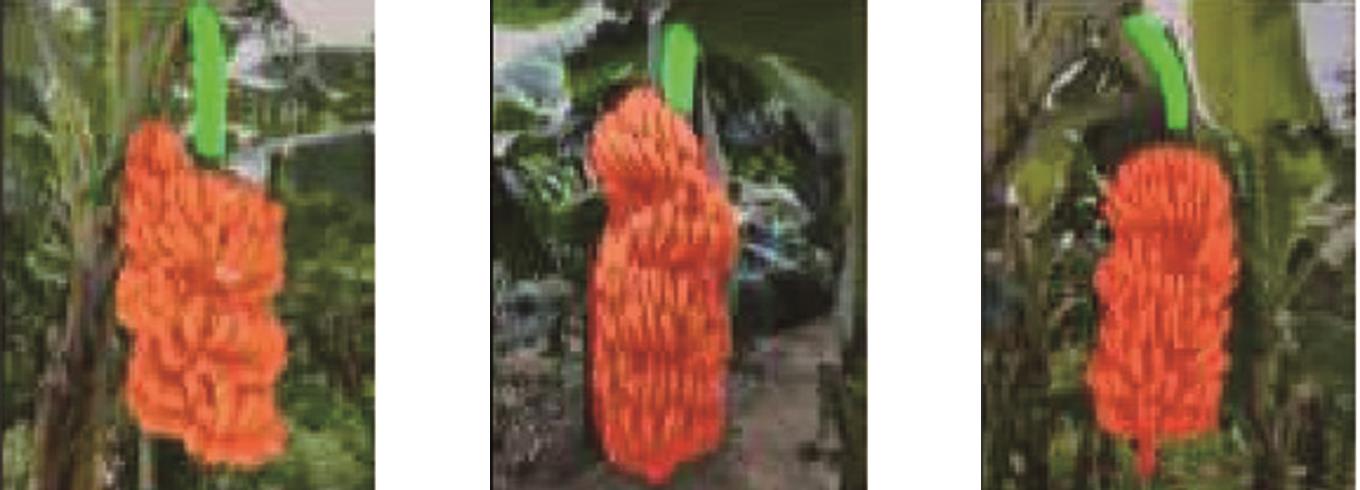
Figure 1 U-Net network segmentation effect diagram
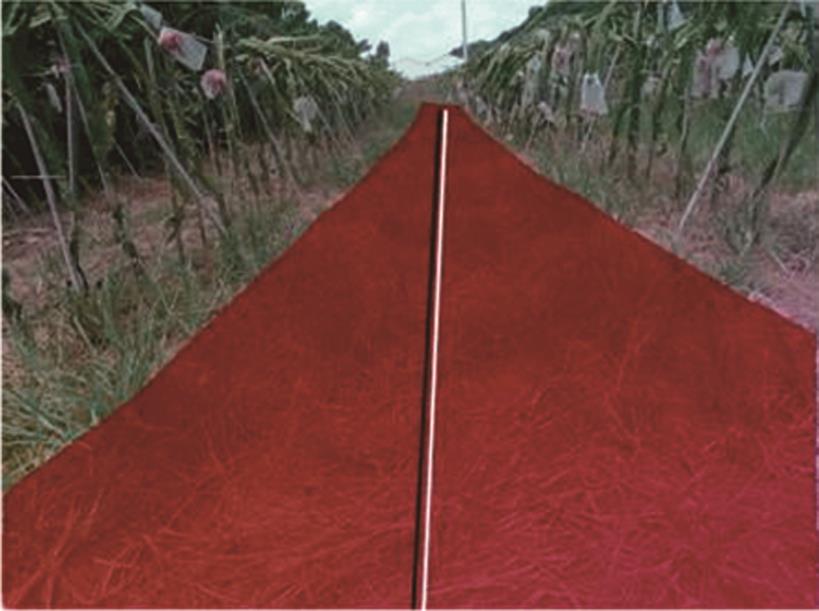
Figure 2 DeepLabV3+ network segmentation effect

Figure 3 Picking process of a kiwifruit harvesting robot

Figure 4 Apple picking patterns of a flexible three-fingered end-effector
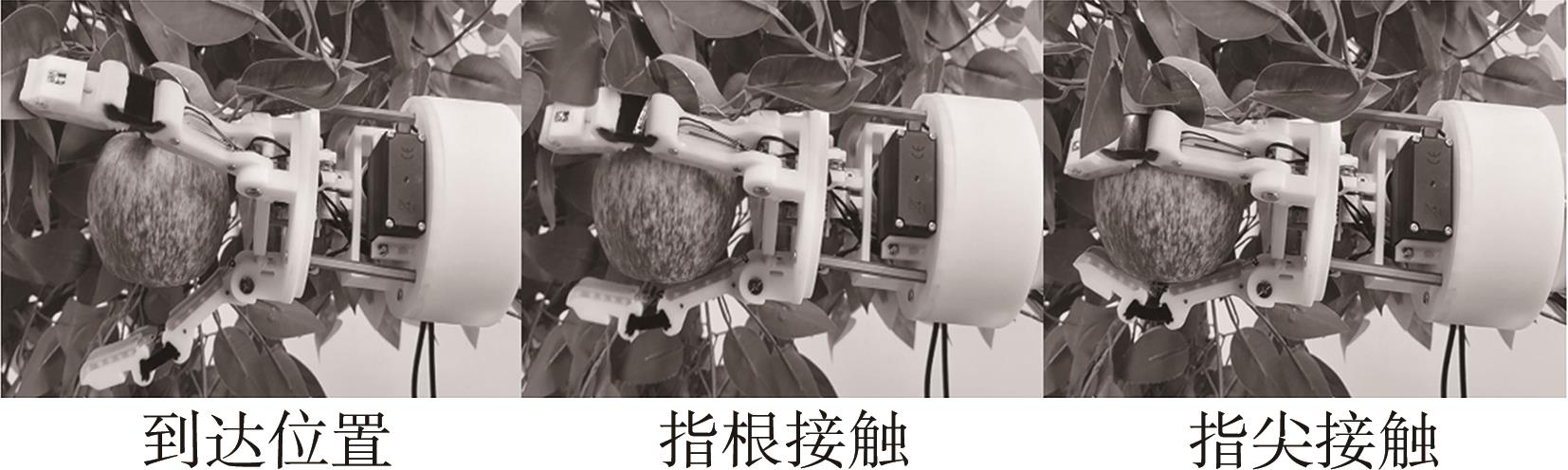
Figure 5 Manipulator gripping process
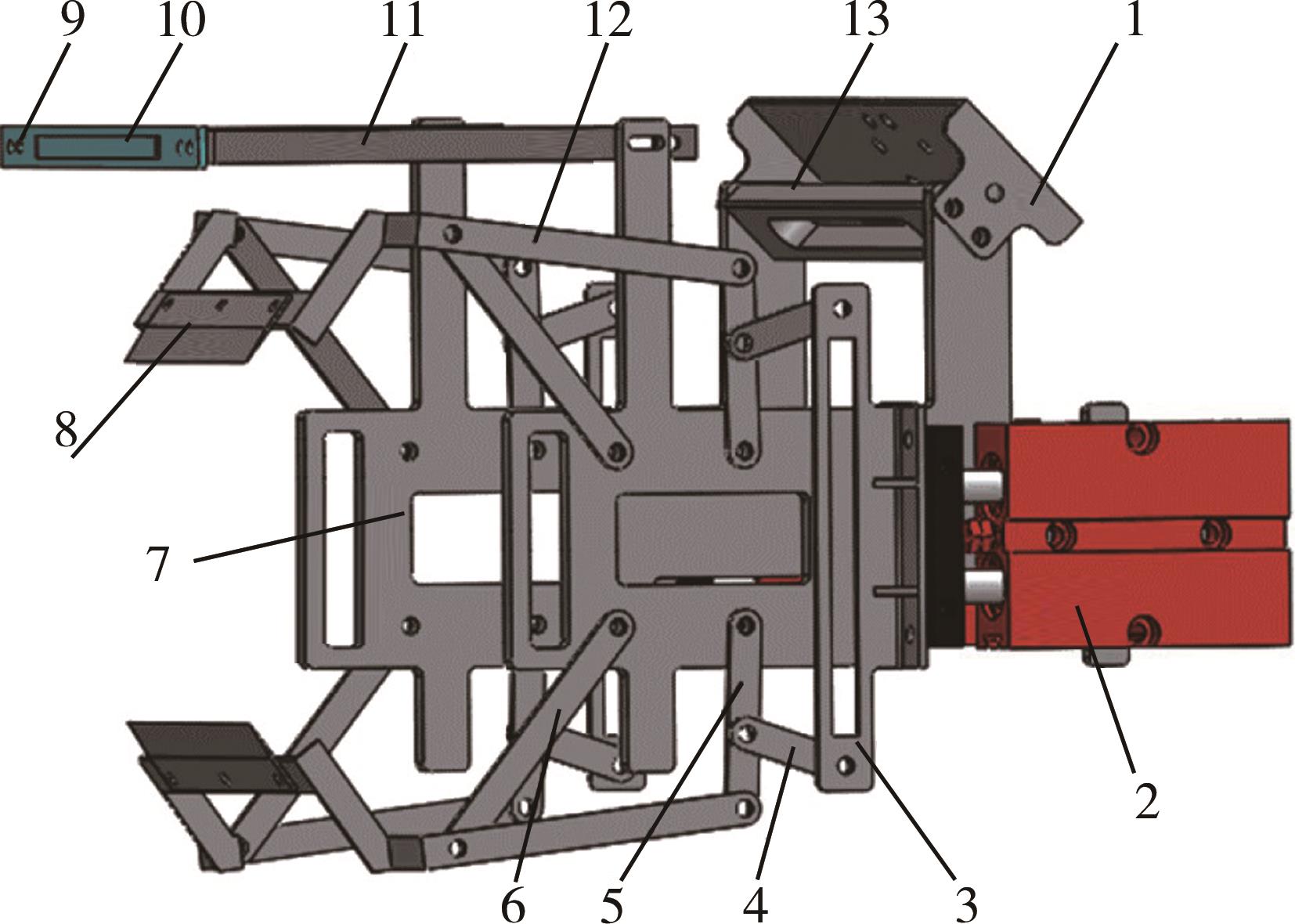
Figure 6 Schematic diagram of end-effector

Figure 7 Mobile robot architecture
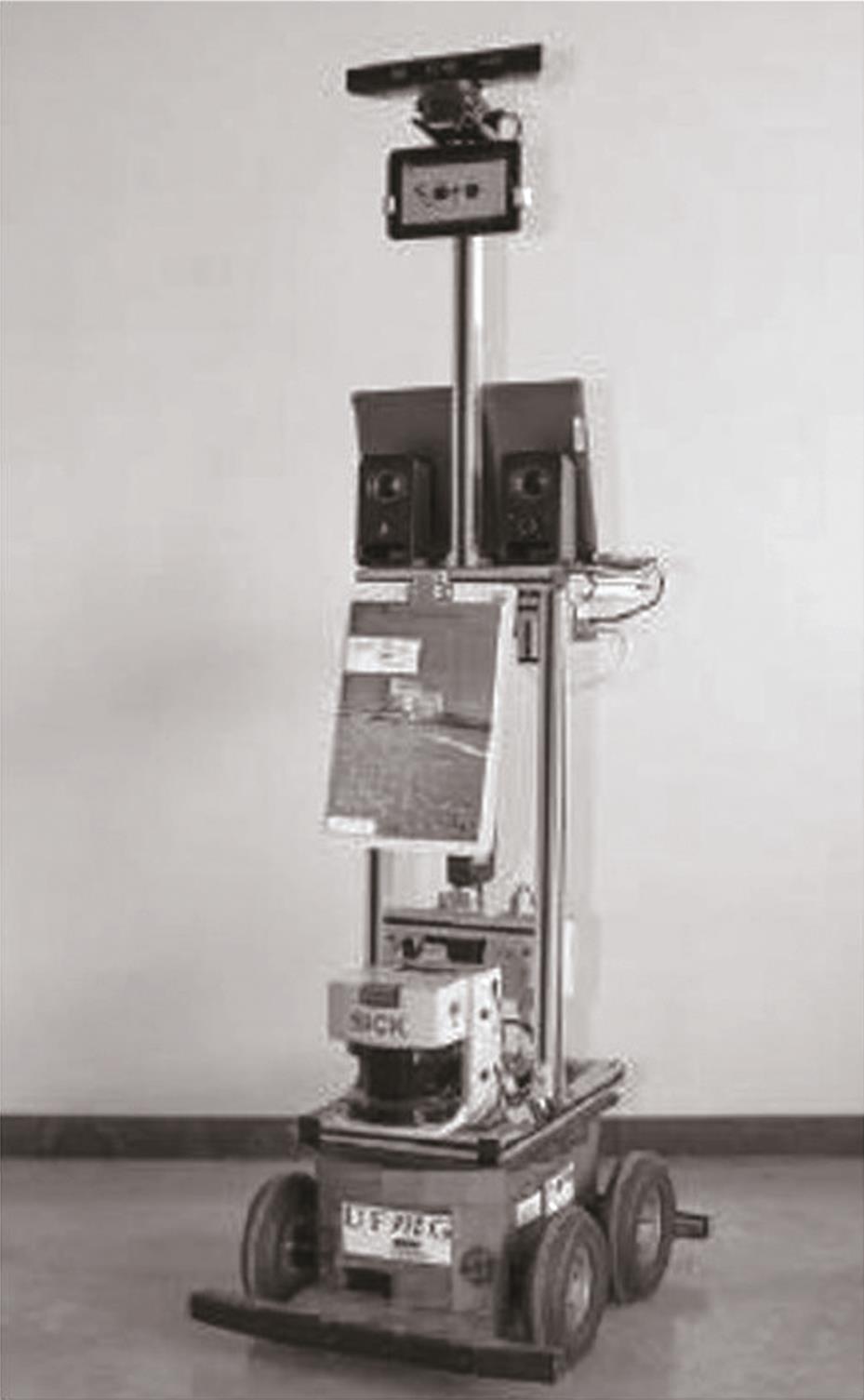
Figure 8 The fruit trees positioning robot of infrared and laser scanning

Figure 9 Principles of single-pointed laser ranger operations for the detection of apples based on apple

Figure 10 Pineapple harvesting robot

Figure 11 Schematic diagram of the end-effector grasping process

Figure 12 Integration of tactile sensors with flexible gripper fingers
| 1 | 中共中央 国务院. 中共中央 国务院关于进一步深化农村改革 扎实推进乡村全面振兴的意见[EB/OL].(2025-01-01).. |
| 2 | 张放. 2023年我国主要水果产量再创新高[J]. 中国果业信息, 2024, 41(6): 55. |
| 3 | 曹楠楠, 张洁瑕. 我国农业机械化对农民增收贡献率实证分析[J]. 中国农机化学报, 2024, 45(9): 327-332. |
| CAO Nannan, ZHANG Jiexia. Empirical analysis on the contribution rate of agricultural mechanization to farmers' income increase in China [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(9): 327-332. | |
| 4 | 李双双, 刘卫柏, 蒋健. 农业机械化可以解决农业劳动力短缺吗?[J]. 中国农机化学报, 2024, 45(7): 316-322, 336. |
| LI Shuangshuang, LIU Weibai, JIANG Jian. Can agricultural mechanization solve the shortage of agricultural labor? [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(7): 316-322, 336. | |
| 5 | 张莎, 冯聪利, 赵培. 水果采摘装置的现状及发展趋势[J]. 科技创新与应用, 2019(7): 84-85. |
| 6 | 段洁利, 王昭锐, 叶磊, 等. 水果采摘机械臂运动规划研究进展与发展趋势[J]. 智能化农业装备学报(中英文), 2021, 2(2): 7-17. |
| DUAN Jieli, WANG Zhaorui, YE Lei, et al. Research progress and development trend of motion planning of fruit picking robot arm [J]. Journal of Intelligent Agricultural Mechanization, 2021, 2(2): 7-17. | |
| 7 | 白克. 基于PLC和机器视觉的采摘机器人智能控制系统设计[J]. 农机化研究, 2021, 43(2): 212-216. |
| BAI Ke. Design of intelligent control system for picking robot based on PLC and machine vision [J]. Journal of Agricultural Mechanization Research, 2021, 43(2): 212-216. | |
| 8 | ALATISE M B, HANCKE G P. A review on challenges of autonomous mobile robot and sensor fusion methods [J]. IEEE Access, 2020, 8: 39830-39846. |
| 9 | 梁雨凤. 基于机器视觉的智能水果采摘机器人系统设计研究[J]. 中国设备工程, 2024(11): 34-35. |
| 10 | SILWAL A, DAVIDSON J R, KARKEE M, et al. Design, integration, and field evaluation of a robotic apple harvester [J]. Journal of Field Robotics, 2017, 34(6): 1140-1159. |
| 11 | LIU X Y, ZHAO D A, JIA W K, et al. A detection method for apple fruits based on color and shape features [J]. IEEE Access, 2019, 7: 67923-67933. |
| 12 | WU Z W, XIA F, ZHOU S Y, et al. A method for identifying grape stems using keypoints [J]. Computers and Electronics in Agriculture, 2023, 209: 107825. |
| 13 | 林桂潮, 吴志铭, 严茂森, 等. 基于机器视觉的多机械臂菠萝采摘机器人设计与试验[J]. 机电工程技术, 2023, 52(10): 141-144, 154. |
| LIN Guichao, WU Zhiming, YAN Maosen, et al. Design and testing of a multi-arm pineapple picking robot based on machine vision [J]. Mechanical & Electrical Engineering Technology, 2023, 52(10): 141-144, 154. | |
| 14 | DU X Q, MENG Z C, MA Z H, et al. Comprehensive visual information acquisition for tomato picking robot based on multitask convolutional neural network [J]. Biosystems Engineering, 2024, 238: 51-61. |
| 15 | 朱立学, 伍荣达, 付根平, 等. 基于多尺度串联空洞卷积的轻量化UNet香蕉图像分割[J]. 农业工程学报, 2022, 38(13): 194-201. |
| ZHU Lixue, WU Rongda, FU Genping, et al. Segmenting banana images using the lightweight UNet of multi-scale serial dilated convolution [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(13): 194-201. | |
| 16 | 罗陈迪, 李文涛, 商枫楠, 等. 基于YOLOv7和YCrCb的火龙果识别与分割方法[J]. 农机化研究, 2025, 47(7): 59-64. |
| LUO Chengdi, LI Wentao, SHANG Fengnan, et al. Identification and segmentation method of dragon fruit based on YOLOv7 and YCrCb [J]. Journal of Agricultural Mechanization Research, 2025, 47(7): 59-64. | |
| 17 | 周佳良, 王金鹏, 张跃跃, 等. 基于GCAM-YOLOv5的火龙果快速检测方法[J]. 林业工程学报, 2023, 8(3): 141-149. |
| ZHOU Jialiang, WANG Jinpeng, ZHANG Yueyue, et al. Fast detection method of dragon fruits based on GCAM-YOLOv5 [J]. Journal of Forestry Engineering, 2023, 8(3): 141-149. | |
| 18 | 刘畅, 孙雨, 杨晶, 等. 基于3C-YOLOv8n和深度相机的葡萄识别与定位方法[J]. 智慧农业(中英文), 2024, 6(6): 121-131. |
| LIU Chang, SUN Yu, YANG Jing, et al. Grape recognition and localization method based on 3C-YOLOv8n and depth camera [J]. Smart Agriculture, 2024, 6(6): 121-131. | |
| 19 | 朱明秀. 采摘机器人水果检测及定位研究——基于图像处理和卷积神经网络[J]. 农机化研究, 2022, 44(4): 49-53. |
| ZHU Mingxiu. Research on fruit detection and location of picking robot—based on image processing and convolution neural network [J]. Journal of Agricultural Mechanization Research, 2022, 44(4): 49-53. | |
| 20 | 王粮局. 基于动态识别定位的多机械手草莓收获机器人的研究[D]. 北京: 中国农业大学, 2016. |
| 21 | 郭艾侠, 彭明明, 邢仲璟. 机器视觉技术在荔枝识别与定位研究中的应用[J]. 计算机工程与应用, 2017, 53(17): 218-223, 259. |
| GUO Aixia, PENG Mingming, XING Zhongjing. Study on recognition and positioning of Litchi based on technology of machine vision [J]. Computer Engineering and Applications, 2017, 53(17): 218-223, 259. | |
| 22 | 伍锡如, 黄国明, 刘金霞, 等. 新型苹果采摘机器人的设计与试验[J]. 科学技术与工程, 2016, 16(9): 71-79. |
| WU Xiru, HUANG Guoming, LIU Jinxia, et al. Design and experiment of a new type apple picking robot [J]. Science Technology and Engineering, 2016, 16(9): 71-79. | |
| 23 | 张帅帅, 伍恩慧, 蔡奇洋, 等. 复杂背景下番茄采摘机器人双目视觉检测技术研究[A]//第十八届全国信号和智能信息处理与应用学术会议论文集[C]. 中国安徽合肥: 2024: 6. |
| 24 | NASIRAHMADI A, STURM B, EDWARDS S, et al. Deep learning and machine vision approaches for posture detection of individual pigs [J]. Sensors, 2019, 19(17): 3738. |
| 25 | KIM W S, LEE D H, KIM Y J, et al. Stereo-vision-based crop height estimation for agricultural robots [J]. Computers and Electronics in Agriculture, 2021, 181: 105937. |
| 26 | ZHU L X, DENG W Q, LAI Y J, et al. Research on improved road visual navigation recognition method based on DeepLabV3+ in Pitaya Orchard [J]. Agronomy, 2024, 14(6): 1119. |
| 27 | MAJEED Y, ZHANG J, ZHANG X, et al. Apple tree trunk and branch segmentation for automatic trellis training using convolutional neural network based semantic segmentation [J]. IFAC-PapersOnLine, 2018, 51(17): 75-80. |
| 28 | GU B X, LIU Q, GAO Y, et al. Research on relative position detection method for orchard robot based on binocular vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 25-32. |
| 29 | 韩振浩, 李佳, 苑严伟, 等. 基于U-Net网络的果园视觉导航路径识别方法[J]. 农业机械学报, 2021, 52(1): 30-39. |
| HAN Zhenhao, LI Jia, YUAN Yanwei, et al. Path recognition of orchard visual navigation based on U-Net [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(1): 30-39. | |
| 30 | 蔡舒平, 孙仲鸣, 刘慧, 等. 基于改进型YOLOv4的果园障碍物实时检测方法[J]. 农业工程学报, 2021, 37(2): 36-43. |
| CAI Shuping, SUN Zhongming, LIU Hui, et al. Real-time detection methodology for obstacles in orchards using improved YOLOv4 [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(2): 36-43. | |
| 31 | 许贞辉, 李晓娟. 果园树干检测与导航线拟合算法研究[J]. 中国农机化学报, 2024, 45(8): 217-222. |
| XU Zhenhui, LI Xiaojuan. Research on tree trunk detection and navigation line fitting algorithm in orchard [J]. Journal of Chinese Agricultural Mechanization, 2024, 45(8): 217-222. | |
| 32 | MASUZAWA H, MIURA J, OISHI S. Development of a mobile robot for harvest support in greenhouse horticulture-Person following and mapping [C]// 2017 IEEE/SICE International Symposium on System Integration (SII). IEEE, 2017: 541-546. |
| 33 | TANG B, GUO Z, HUANG C, et al. A fruit-tree mapping system for semi-structured orchards based on multi-sensor-fusion SLAM [J]. IEEE Access, 2024. |
| 34 | PANDA S K, LEE Y, JAWED M K. Agronav: Autonomous navigation framework for agricultural robots and vehicles using semantic segmentation and semantic line detection [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2023: 6272-6281. |
| 35 | CHEN X, ZHANG B, LUO L. Multi-feature fusion tree trunk detection and orchard mobile robot localization using camera/ultrasonic sensors [J]. Computers and Electronics in Agriculture, 2018, 147: 91-108. |
| 36 | AHANAT K, JUAN A C R, VERONIQUE P. Tactile sensing in dexterous robot hands-Review [J]. Rob. Auton. Syst, 2015, 74: 195-220. |
| 37 | MU L, CUI G, LIU Y, et al. Design and simulation of an integrated end-effector for picking kiwifruit by robot [J]. Information Processing in Agriculture, 2020, 7(1): 58-71. |
| 38 | JI W, HE G, XU B, et al. A new picking pattern of a flexible three-fingered end-effector for apple harvesting robot [J]. Agriculture, 2024, 14(1): 102. |
| 39 | 王雯, 张叶清, 张静, 等. 基于采摘机器人触觉的猕猴桃成熟度感知方法[J]. 科技与创新, 2021(18): 59-60, 64-65. |
| WANG Wen, ZHANG Yeqing, ZHANG Jing, et al. Kiwifruit maturity perception method based on picking robot tactile sensing [J]. Science & Innovation, 2021(18): 59-60, 64-65. | |
| 40 | 蒋林祥, 贺磊盈, 马锃宏. 多传感欠驱动水果采摘机械手的设计[J]. 农机化研究, 2025, 47(1): 93-98. |
| JIANG Linxiang, HE Leiying, MA Zenghong. Design of an underactuated robotic hand with multi-sensor for fruit harvesting [J]. Journal of Agricultural Mechanization Research, 2025, 47(1): 93-98. | |
| 41 | 张跃跃, 田嘉全, 王文祥, 等. 火龙果采摘机器人末端执行器设计与试验[J]. 林业工程学报, 2023, 8(4): 144-150. |
| ZHANG Yueyue, TIAN Jiaquan, WANG Wenxiang, et al. Design and experiments of end-effector for dragon fruit picking robot [J]. Journal of Forestry Engineering, 2023, 8(4): 144-150. | |
| 42 | 马锃宏, 谭励, 曾伟, 等. 基于视触觉感知的番茄尺寸和姿态解析方法[J]. 农业机械学报, 2024, 55(1): 223-232. |
| MA Zenghong, TAN Li, ZENG Wei, et al. Analytical method and evaluation of tomato size and posture based on visual and tactile perception [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(1): 223-232. | |
| 43 | JIMÉNEZ A R, CERES R, PONS J L. A vision system based on a laser range-finder applied to robotic fruit harvesting [J]. Machine Vision and Applications, 2000, 11: 321-329. |
| 44 | SHALAL N J D. Orchard mapping and mobile robot localisation using on-board camera and laser scanner data fusion [D]. University of Southern Queensland, 2016. |
| 45 | VAN BEERS R, AERNOUTS B, DE BAERDEMAEKER J, et al. Apple ripeness detection using hyperspectral laser scatter imaging [C]// Sensing Technologies for Biomaterial, Food, and Agriculture 2013. SPIE, 2013, 8881: 111-115. |
| 46 | YANG Y, XIE H H, ZHANG K L, et al. Design, development, integration, and field evaluation of a ridge-planting strawberry harvesting robot [J]. Agriculture, 2024, 14(12): 2126. |
| 47 | 吴德刚, 赵利平, 陈乾辉. 基于激光传感器的农业机械控制器设计[J]. 激光杂志, 2024, 45(2): 234-238. |
| WU Degang, ZHAO Liping, CHEN Qianhui. Design of agricultural machinery controller based on laser sensor [J]. Laser Journal, 2024, 45(2): 234-238. | |
| 48 | 冯娟, 刘刚, 司永胜, 等. 苹果采摘机器人激光视觉系统的构建[J]. 农业工程学报, 2013, 29(S1): 32-37. |
| FENG Juan, LIU Gang, SI Yongsheng, et al. Construction of laser vision system for apple harvesting robot [J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(S1): 32-37. | |
| 49 | 张邦凤. 果树快速定位采摘机器人设计——基于红外和激光扫描技术[J]. 农机化研究, 2017, 39(6): 233-237. |
| ZHANG Bangfeng. Design for picking robot of fruit trees fast positioning—based on infrared and laser scanning technology [J]. Journal of Agricultural Mechanization Research, 2017, 39(6): 233-237. | |
| 50 | 王立谦, 汪小志, 林卫国. 农业激光自动采摘定位机器人控制系统设计——基于PID控制[J]. 农机化研究, 2015, 37(9): 211-216. |
| WANG Liqian, WANG Xiaozhi, LIN Weiguo. Design of agricultural laser automatic picking positioning robot control system based on PID Control [J]. Journal of Agricultural Mechanization Research, 2015, 37(9): 211-216. | |
| 51 | 张宾, 宿敬肖, 张微微, 等. 基于激光视觉的智能识别苹果采摘机器人设计[J]. 农机化研究, 2016, 38(7): 60-64. |
| ZHANG Bin, SU Jingxiao, ZHANG Weiwei, et al. Design for apple-picking robot of intelligent recognition based on laser vision [J]. Journal of Agricultural Mechanization Research, 2016, 38(7): 60-64. | |
| 52 | 刘兆祥, 刘刚, 乔军. 应用于苹果采摘机器人的激光距离传感器[J]. 江苏大学学报(自然科学版), 2010, 31(4): 373-377. |
| LIU Zhaoxiang, LIU Gang, QIAO Jun. Laser ranging sensor for apple harvesting robot [J]. Journal of Jiangsu University(Natural Science Edition), 2010, 31(4): 373-377. | |
| 53 | 冯青春, 赵春江, 王晓楠, 等. 基于视觉伺服的樱桃番茄果串对靶测量方法 [J]. 农业工程学报, 2015, 31(16): 206-212. |
| FENG Qingchun, ZHAO Chunjiang, WANG Xiaonan, et al. Fruit bunch meat food for cherry tomato based on visual service [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(16): 206-212. | |
| 54 | ABEYRATHNA R M R D, NAKAGUCHI V M, LIU Z, et al. 3D camera and single-point laser sensor integration for apple localization in spindle-type orchard systems [J]. Sensors, 2024, 24(12): 3753. |
| 55 | ZHANG Y Y, ZHANG B, SHEN C, et al. Review of the field environmental sensing methods based on multi-sensor information fusion technology [J]. International Journal of Agricultural and Biological Engineering, 2024, 17(2): 1-13. |
| 56 | 张炜, 史桐源, 沈博源, 等. 基于机器视觉与多传感器融合的智能番茄采摘机器人设计[J]. 农业技术与装备, 2024(9): 13-16, 19. |
| ZHANG Wei, SHI Tongyuan, SHEN Boyuan, et al. Design of intelligent tomato picking robot based on machine vision and multi sensor fusion [J]. Agricultural Technology & Equipment, 2024(9): 13-16, 19. | |
| 57 | 焦锐, 马瑞峻, 陈瑜, 等. 基于多传感器信息融合的菠萝果茎切割点位置检测方法[J]. 华中农业大学学报, 2024, 43(5): 21-30. |
| JIAO Rui, MA Ruijun, CHEN Yu, et al. A method for detecting cutting points in fruit stem of pineapple based on fusion of multi-sensor information [J]. Journal of Huazhong Agricultural University, 2024, 43(5): 21-30. | |
| 58 | 刘继展, 李萍萍, 李智国. 番茄采摘机器人末端执行器的硬件设计[J]. 农业机械学报, 2008(3): 109-112. |
| LIU Jizhan, LI Pingping, LI Zhiguo. Hardware design of the end effector for tomato harvesting robot [J]. Transactions of the Chinese Society for Agricultural Machinery, 2008(3): 109-112. | |
| 59 | 周俊, 刘锐, 张高阳. 基于立体视觉的水果采摘机器人系统设计[J]. 农业机械学报, 2010, 41(6): 158-162. |
| ZHOU Jun, LIU Rui, ZHANG Gaoyang. Fruit harvesting robot based on stereo vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(6): 158-162. | |
| 60 | XIE Y X, ZHANG B H, ZHOU J, et al. An integrated multi-sensor network for adaptive grasping of fragile fruits: Design and feasibility tests [J]. Sensors, 2020, 20(17): 4973. |
| 61 | KANG H W, WANG X, CHEN C. Accurate fruit localisation for robotic harvesting using high resolution lidar-camera fusion [J]. arXiv preprint arXiv: , 2022. |
| 62 | ZHOU H Y, WANG X, KANG H, et al. A tactile-enabled grasping method for robotic fruit harvesting [J]. arXiv preprint arXiv: , 2021. |
| 63 | GAO J, ZHANG F, ZHANG J X, et al. Picking patterns evaluation for cherry tomato robotic harvesting end-effector design [J]. Biosystems Engineering, 2024, 239: 1-12. |
| 64 | 沈跃, 肖鑫桦, 刘慧, 等. 基于LiDAR/IMU紧耦合的林果园机器人实时定位与建图方法[J]. 农业机械学报, 2023, 54(11): 20-28, 48. |
| SHEN Yue, XIAO Xinhua, LIU Hui, et al. Real-time localization and mapping method for agricultural robot in orchards based on LiDAR/IMU tight-coupling [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(11): 20-28, 48. | |
| 65 | 魏语佳. 面向果园环境的多传感器融合SLAM与导航研究[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| 66 | CHEN K, YANG J, JIANG S, et al. Multi-sensor fusion tomato picking robot localization and mapping research [J]. Journal of physics. Conference series, 2023, 2477(1): 12057. |
| 67 | 韦慧玲, 梁成斌, 王金海, 等. 绳驱柔性机械手研究进展及其在农业机器人中的应用[J]. 智能化农业装备学报(中英文), 2024, 5(4): 95-106. |
| WEI Huiling, LIANG Chengbin, WANG Jinhai, et al. Research progress of cable-driven flexible manipulator and its application in agricultural robots [J]. Journal of Intelligent Agricultural Mechanization,2024, 5(4): 95-106. | |
| 68 | 陈明猷, 罗陆锋, 刘威, 等. 采摘机器人全果园视觉感知及自主作业综述[J]. 智慧农业(中英文), 2024, 6(5): 20-39. |
| CHEN Mingyou, LUO Lufeng, LIU Wei, et al. Orchard-wide visual perception and autonomous operation of fruit picking robots: A review [J]. Smart Agriculture, 2024, 6(5): 20-39. | |
| 69 | 王延鑫, 汪小旵, 李培艺, 等. 包络式金丝皇菊采摘机械手设计与试验优化[J/OL]. 南京农业大学学报, 1-18[2025-03-10]. . |
| WANG Yanxin, WANG Xiaochan, LI Peiyi, et al. Design and experimental optimization of an enveloping golden chrysanthemum harvesting manipulator [J/OL]. Journal of Nanjing Agricultural University, 1-18[2025-03-10]. . |
| [1] | WANG Kelin, LIU Longshen, CHEN Jinxin, LI Peng, OKINDA Cedric, SHEN Mingxia. Application and prospect of artificial intelligence in livestock and poultry farming robots [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 44-57. |
| [2] | ZHANG Jinguo, CAI Jianfeng, JIANG Rongrong, YU Shanshan, WANG Pengbo. Multi-task joint perception framework for autonomous navigation in orchard robotics [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 35-43. |
| [3] | WANG Yina, WANG Pengjun, CHEN Cong. Current status and trends of broiler welfare farming [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 105-110. |
| [4] | WANG Dezhi, WANG Yanxin, WANG Xiaochan, SHI Yinyan, ZHANG Yongnian. Management and harvesting technologies in agricultural robotics: Current status, challenges and future developments [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 1-23. |
| [5] | ZHANG Zhilei, GUO Feihong, ZHOU Bingyang, XU Bin, WU Hao, MU Gang. Research on slip model of automatic driving of shellfish harvesting equipment in mudflat [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 81-90. |
| [6] | WU Qing, WEI Runxuan, ZHOU Le, YANG Hao, LIU Wanru, XU Hongmei. Lightweight fresh tea leaf recognition method based on improved YOLOv5s [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 1-14. |
| [7] | WANG Yongjian, DING Xiang, LI Hua, SAMUEL Mbugua Nyambura, LI Yuqing, GE Yanyan, QIU Shilong, FENG Xuebin. Design and experiment of STM32-based monitoring system for garlic combine harvester [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 15-24. |
| [8] | CAI Jiayi, LIU Shiwei, SHAN Longxiang, LIU Yong, SHEN Hongyi, WANG Qiaohua. Design and experiment of cracked egg sorting robot based on machine vision and YOLO v5 [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 41-50. |
| [9] | SUN Zhu, GU Wei, CUI Longfei, CAI Chen, CHEN Chen, ZHOU Qingqing, DING Suming, LAN Yubin, XUE Xinyu. Research status and development trends of key technologies for intelligent plant protection equipment [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 1-23. |
| [10] | ZHAO Zexing, WU Xiaopeng, WANG Yixin, YAN Xiaoli, HUANG Yuxiang, GAO Xiaojun. Research on question answering system for crop diseases and pests based on knowledge graph [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 39-50. |
| [11] | MA Zenghong, YUE Jiawen, YIN Cheng, ZHAO Runmao, CHANDA Mulongoti, DU Xiaoqiang. Visual navigation in orchard based on multiple images at different shooting angles [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 51-65. |
| [12] | ZHAO Lijun, JIA Yunfan, YIN Wenke, HUANG Hua, LI Xiang, LI Qiang. Design and experiment of a tracked weeding robot based on model predictive control [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 84-94. |
| [13] | WEI Huiling, LIANG Chengbin, WANG Jinhai, CHEN Mingyou, LUO Lufeng. Research progress of cable-driven flexible manipulator and its application in agricultural robots [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 95-106. |
| [14] | LI Shilong, XU Chenyi, WANG Nan, CAO Huini, YU Fenghua. Research on rice nitrogen unmanned aerial vehicle hyperspectral inversion based on BWO-ELM [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(3): 14-21. |
| [15] | YANG Minglai, QIN Li, JIA Peng, LIANG Xuemei, YU Helong, BIAN Ting, MA Qiang, WANG Hui, LI Chenglong, Sicheng TIAN, WANG Ying. Progress in the application of new laser light source in rice seedling production [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(3): 22-32. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||