ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2025, Vol. 6 ›› Issue (2): 69-78.DOI: 10.12398/j.issn.2096-7217.2025.02.006
Previous Articles Next Articles
LUAN Yuhang1( ), QIAN Yuxing1, GAO Min1, WANG Mingyu1, LI Xiuchen1,2,3, ZHANG Hanbing1,2,3()
), QIAN Yuxing1, GAO Min1, WANG Mingyu1, LI Xiuchen1,2,3, ZHANG Hanbing1,2,3()
Received:2025-03-03
Revised:2025-04-03
Online:2025-05-15
Published:2025-05-20
Corresponding author:
ZHANG Hanbing
Supported by:CLC Number:
LUAN Yuhang, QIAN Yuxing, GAO Min, WANG Mingyu, LI Xiuchen, ZHANG Hanbing. Discrete element simulation parameter calibration for smart shellfish seeding devices[J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 69-78.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2025.02.006

Figure 1 Modeling process of discrete element model of clam seedling
| 材料 | 参数 | 数值 |
|---|---|---|
| 不锈钢板 | 泊松比v 弹性模量E/Pa 密度ρ/(g·cm-3) | 0.3 7.42×1010 7.93 |
| EVA | 泊松比v 弹性模量E/Pa 密度ρ/(g·cm-3) | 0.25 1.64×108 0.92 |
Table 1 Contact material physical parameters
| 材料 | 参数 | 数值 |
|---|---|---|
| 不锈钢板 | 泊松比v 弹性模量E/Pa 密度ρ/(g·cm-3) | 0.3 7.42×1010 7.93 |
| EVA | 泊松比v 弹性模量E/Pa 密度ρ/(g·cm-3) | 0.25 1.64×108 0.92 |
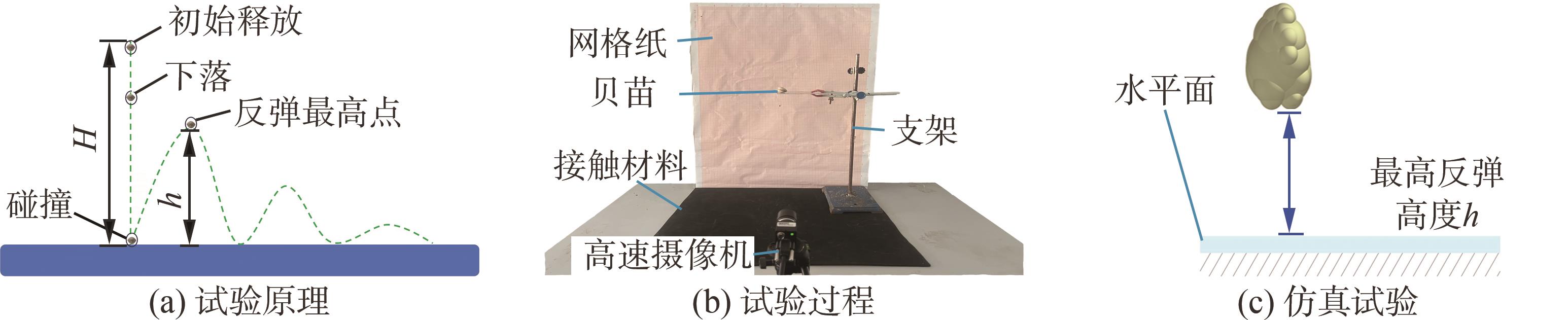
Figure 2 Calibration test of collision recovery coefficient between clam seedlings and materials
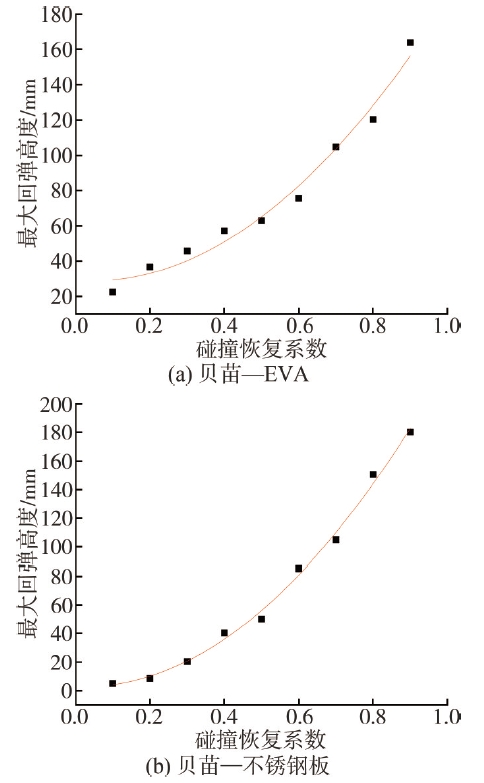
Figure 3 Collision recovery coefficient and maximum rebound height fit curve
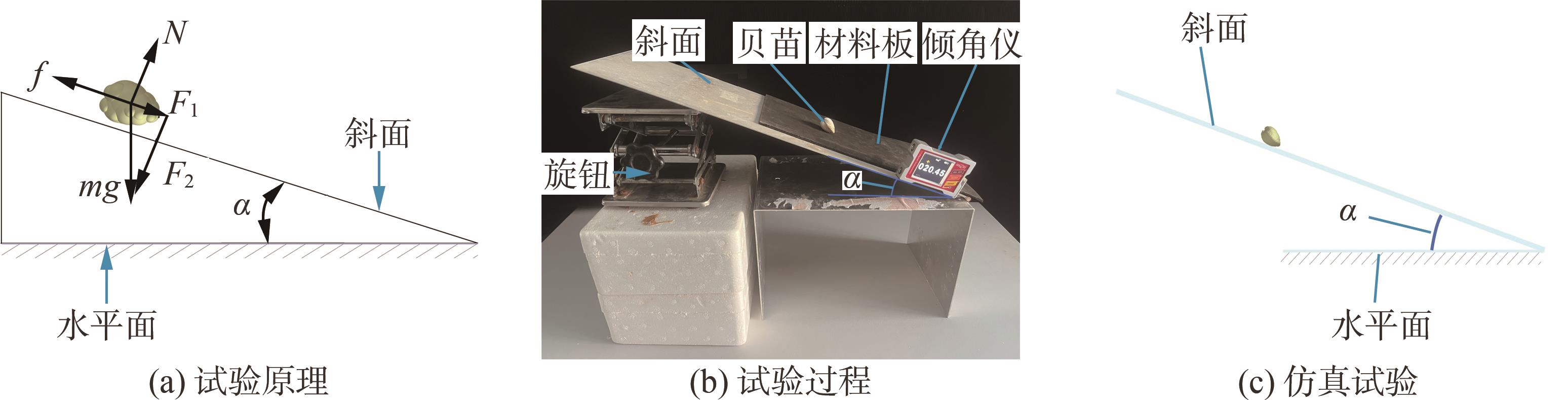
Figure 4 Calibration test of static friction factor between clam seedlings and materials
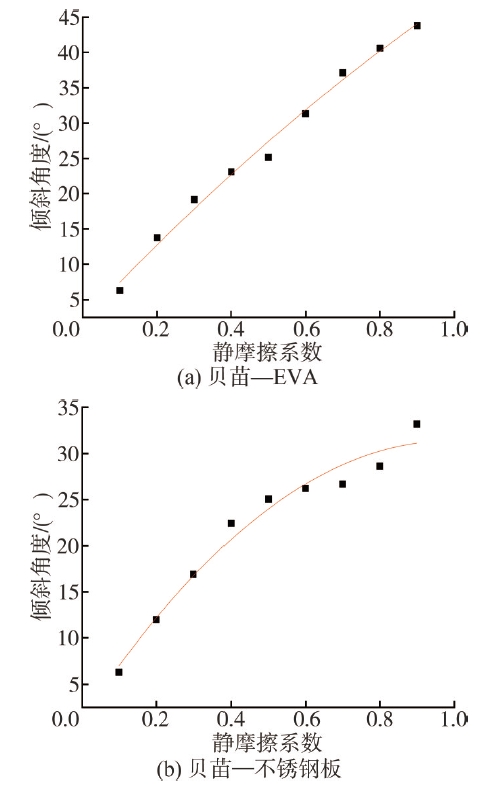
Figure 5 Static friction coefficient and angle fitting curve
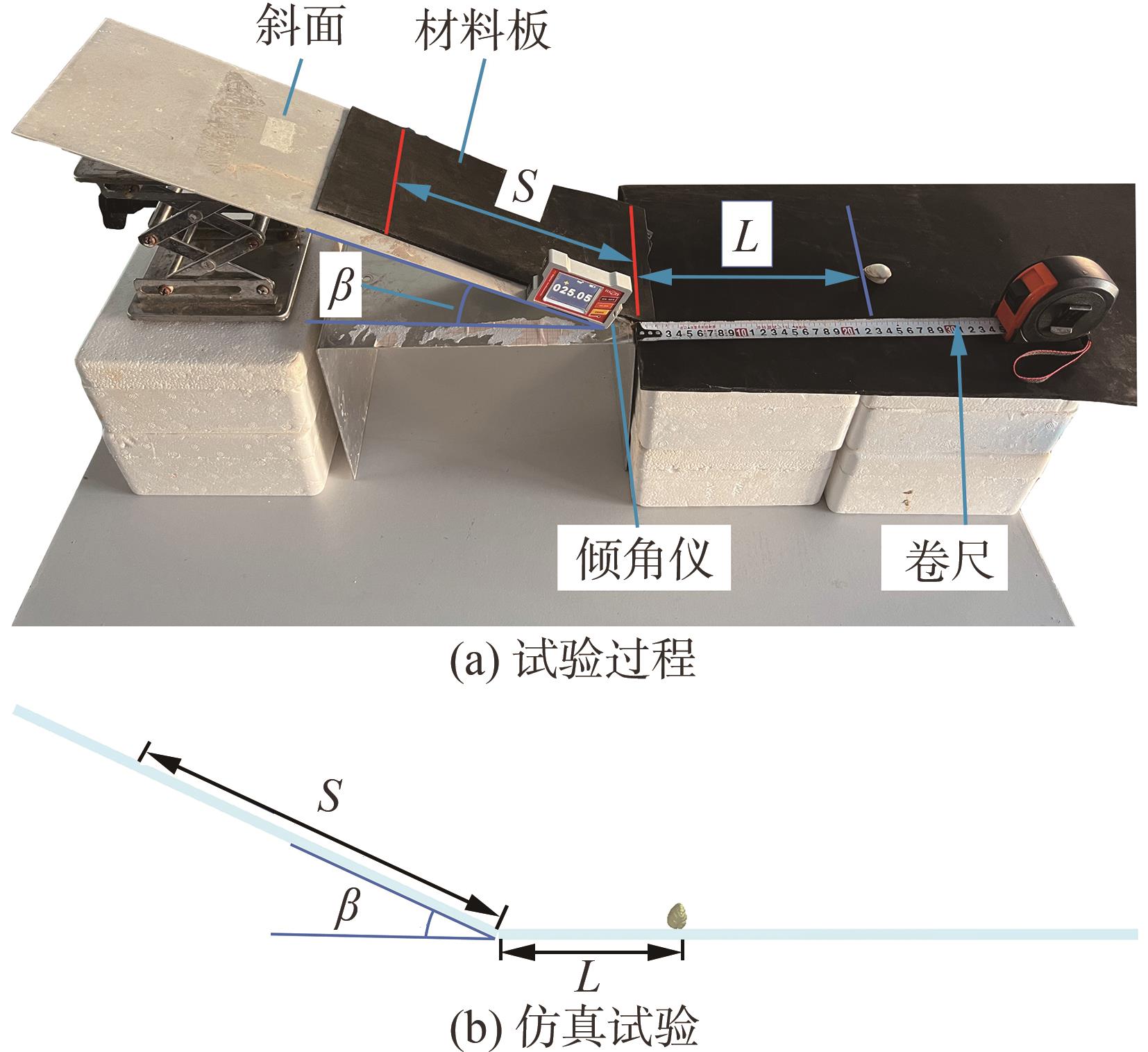
Figure 6 Calibration test of rolling friction factor between clam seedlings and materials
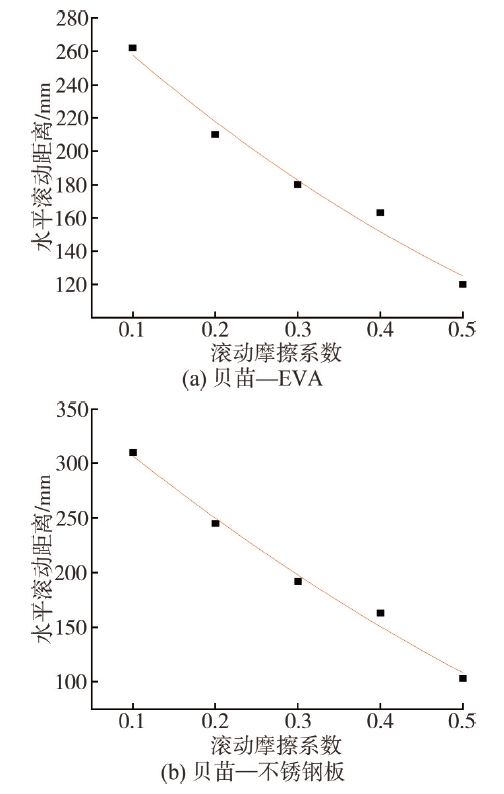
Figure 7 Rolling friction coefficient and horizontal rolling distance regression model
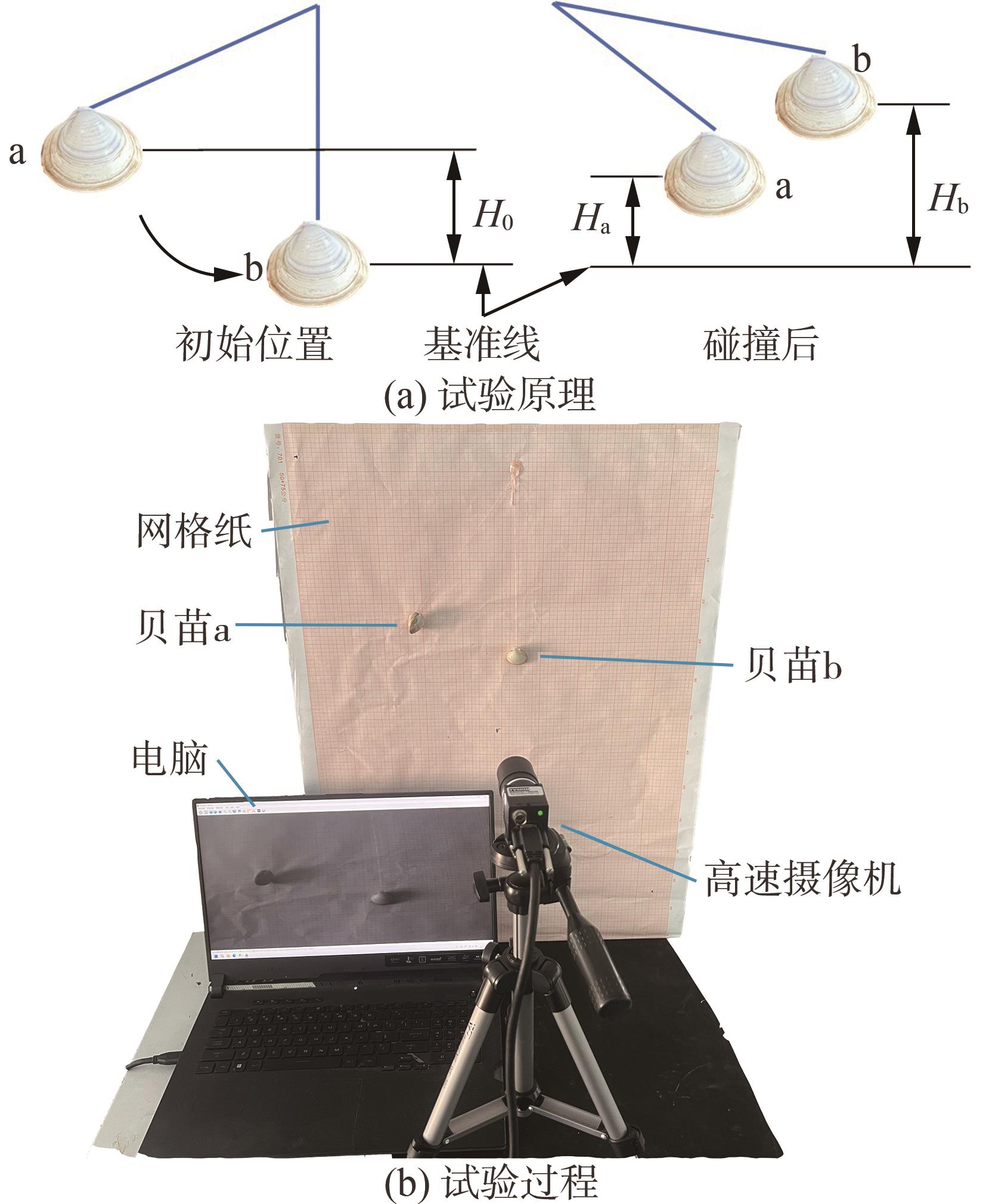
Figure 8 Test of collision recovery coefficient between clam seedlings and clam seedlings
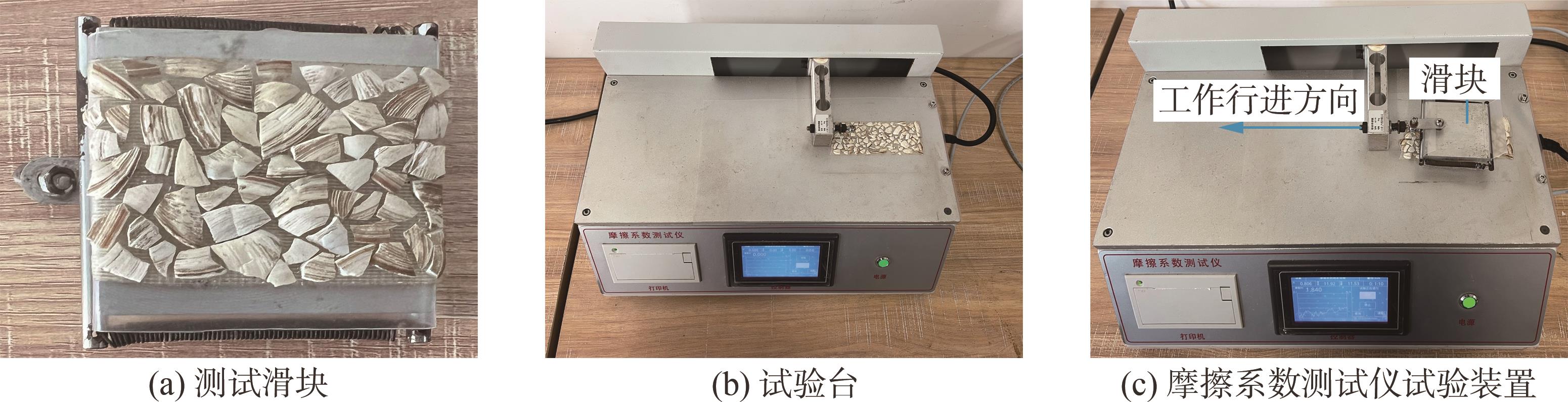
Figure 9 Test for the friction coefficient between the clam seedlings and clam seedlings
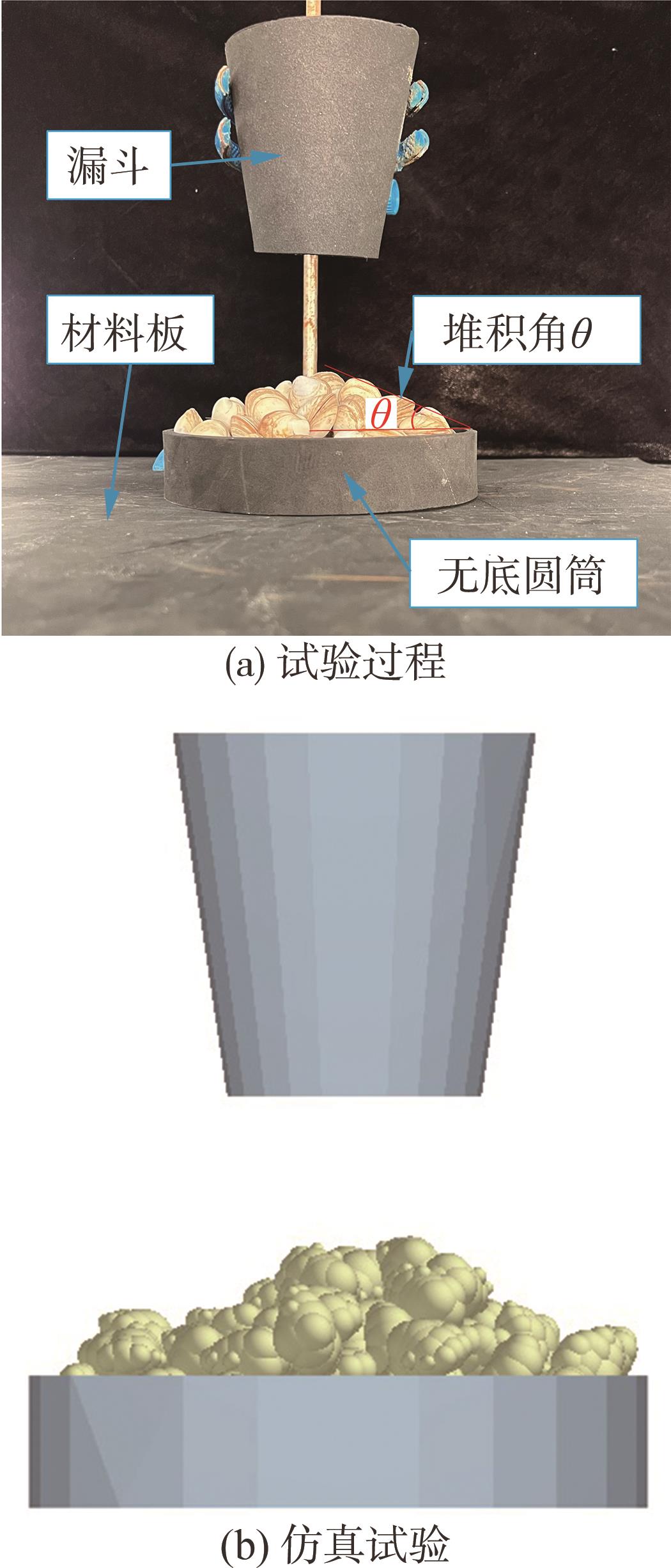
Figure 10 Stacking angle test

Figure 11 Matlab software processing
| 编码 | 因素 | ||
|---|---|---|---|
| e | μn | μr | |
| -1 | 0.17 | 0.581 | 0.307 |
| 0 | 0.305 | 0.628 | 0.380 5 |
| 1 | 0.44 | 0.675 | 0.454 |
Table 2 Factor level coding table
| 编码 | 因素 | ||
|---|---|---|---|
| e | μn | μr | |
| -1 | 0.17 | 0.581 | 0.307 |
| 0 | 0.305 | 0.628 | 0.380 5 |
| 1 | 0.44 | 0.675 | 0.454 |
| 序号 | 因素 | Y/% | ||
|---|---|---|---|---|
| e | μn | μr | ||
| 1 | 0.17 | 0.628 | 0.307 | 3.18 |
| 2 | 0.44 | 0.628 | 0.454 | 10.97 |
| 3 | 0.17 | 0.628 | 0.454 | 10.69 |
| 4 | 0.305 | 0.581 | 0.307 | 4.62 |
| 5 | 0.305 | 0.628 | 0.380 5 | 9.51 |
| 6 | 0.305 | 0.628 | 0.380 5 | 10.54 |
| 7 | 0.44 | 0.628 | 0.307 | 9.71 |
| 8 | 0.44 | 0.581 | 0.380 5 | 9.11 |
| 9 | 0.305 | 0.675 | 0.307 | 9.69 |
| 10 | 0.17 | 0.581 | 0.380 5 | 4.25 |
| 11 | 0.305 | 0.628 | 0.380 5 | 9.37 |
| 12 | 0.44 | 0.675 | 0.380 5 | 10.98 |
| 13 | 0.305 | 0.628 | 0.380 5 | 10.67 |
| 14 | 0.17 | 0.675 | 0.380 5 | 10.17 |
| 15 | 0.305 | 0.581 | 0.454 | 10.58 |
| 16 | 0.305 | 0.628 | 0.380 5 | 10.51 |
| 17 | 0.305 | 0.675 | 0.454 | 12.27 |
Table 3 Scheme and results of three-factor and three-level orthogonal experiment
| 序号 | 因素 | Y/% | ||
|---|---|---|---|---|
| e | μn | μr | ||
| 1 | 0.17 | 0.628 | 0.307 | 3.18 |
| 2 | 0.44 | 0.628 | 0.454 | 10.97 |
| 3 | 0.17 | 0.628 | 0.454 | 10.69 |
| 4 | 0.305 | 0.581 | 0.307 | 4.62 |
| 5 | 0.305 | 0.628 | 0.380 5 | 9.51 |
| 6 | 0.305 | 0.628 | 0.380 5 | 10.54 |
| 7 | 0.44 | 0.628 | 0.307 | 9.71 |
| 8 | 0.44 | 0.581 | 0.380 5 | 9.11 |
| 9 | 0.305 | 0.675 | 0.307 | 9.69 |
| 10 | 0.17 | 0.581 | 0.380 5 | 4.25 |
| 11 | 0.305 | 0.628 | 0.380 5 | 9.37 |
| 12 | 0.44 | 0.675 | 0.380 5 | 10.98 |
| 13 | 0.305 | 0.628 | 0.380 5 | 10.67 |
| 14 | 0.17 | 0.675 | 0.380 5 | 10.17 |
| 15 | 0.305 | 0.581 | 0.454 | 10.58 |
| 16 | 0.305 | 0.628 | 0.380 5 | 10.51 |
| 17 | 0.305 | 0.675 | 0.454 | 12.27 |
| 方差来源 | 平方和 | 自由度 | 均方 | F值 | P值 |
|---|---|---|---|---|---|
| 模型 | 107.67 | 9 | 11.96 | 43.18 | <0.000 1 |
| e | 19.47 | 1 | 19.47 | 70.27 | <0.000 1 |
| μn | 25.49 | 1 | 25.49 | 92.00 | <0.000 1 |
| μr | 38.63 | 1 | 38.63 | 139.43 | <0.000 1 |
| eμn | 4.10 | 1 | 4.10 | 14.80 | 0.006 3 |
| eμr | 9.77 | 1 | 9.77 | 35.25 | 0.000 6 |
| μnμr | 3.33 | 1 | 3.33 | 12.02 | 0.010 4 |
| e2 | 5.15 | 1 | 5.15 | 18.60 | 0.003 5 |
| μn2 | 0.628 2 | 1 | 0.628 2 | 2.27 | 0.175 9 |
| μr2 | 0.596 1 | 1 | 0.596 1 | 2.15 | 0.185 9 |
| 失拟项 | 0.373 9 | 3 | 0.124 6 | 0.318 4 | 0.812 9 |
| 误差 | 1.57 | 4 | 0.391 4 | ||
| 总和 | 109.61 | 16 |
Table 4 Analysis of variance of experimental results
| 方差来源 | 平方和 | 自由度 | 均方 | F值 | P值 |
|---|---|---|---|---|---|
| 模型 | 107.67 | 9 | 11.96 | 43.18 | <0.000 1 |
| e | 19.47 | 1 | 19.47 | 70.27 | <0.000 1 |
| μn | 25.49 | 1 | 25.49 | 92.00 | <0.000 1 |
| μr | 38.63 | 1 | 38.63 | 139.43 | <0.000 1 |
| eμn | 4.10 | 1 | 4.10 | 14.80 | 0.006 3 |
| eμr | 9.77 | 1 | 9.77 | 35.25 | 0.000 6 |
| μnμr | 3.33 | 1 | 3.33 | 12.02 | 0.010 4 |
| e2 | 5.15 | 1 | 5.15 | 18.60 | 0.003 5 |
| μn2 | 0.628 2 | 1 | 0.628 2 | 2.27 | 0.175 9 |
| μr2 | 0.596 1 | 1 | 0.596 1 | 2.15 | 0.185 9 |
| 失拟项 | 0.373 9 | 3 | 0.124 6 | 0.318 4 | 0.812 9 |
| 误差 | 1.57 | 4 | 0.391 4 | ||
| 总和 | 109.61 | 16 |
| 接触类型 | 碰撞恢复系数 | 静摩擦系数 | 滚动摩擦系数 |
|---|---|---|---|
| 贝苗—贝苗 | 0.170 | 0.620 | 0.313 |
| 贝苗—不锈钢板 | 0.128 | 0.323 | 0.177 |
| 贝苗—EVA | 0.339 | 0.538 | 0.205 |
Table 5 Calibration parameter summary
| 接触类型 | 碰撞恢复系数 | 静摩擦系数 | 滚动摩擦系数 |
|---|---|---|---|
| 贝苗—贝苗 | 0.170 | 0.620 | 0.313 |
| 贝苗—不锈钢板 | 0.128 | 0.323 | 0.177 |
| 贝苗—EVA | 0.339 | 0.538 | 0.205 |
| 1 | 农业农村部渔业渔政管理局. 2024年中国渔业统计年鉴[M]. 北京: 中国农业出版社, 2024. |
| 2 | 徐泳, 李红艳, 黄文彬. 耕作土壤动力学的三维离散元建模和仿真方案策划[J]. 农业工程学报, 2003(2): 34-38. |
| XU Yong, LI Hongyan, HUANG Wenbin. Modeling and methodological strategy of discrete element method simulation for tillage soil dynamics [J]. Transactions of the Chinese Society of Agricultural Engineering, 2003(2): 34-38. | |
| 3 | 张锐, 韩佃雷, 吉巧丽, 等. 离散元模拟中沙土参数标定方法研究[J]. 农业机械学报, 2017, 48(3): 49-56. |
| ZHANG Rui, HAN Tianlei, JI Qiaoli, et al. Calibration methods of sandy soil parameters in simulation of discrete element method [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 49-56. | |
| 4 | 张胜伟, 李华. 绿豆种子离散元参数标定及排料设备优化[J]. 农业工程学报, 2020, 36(12): 45-52. |
| ZHANG Shengwei, LI Hua. Calibration of discrete element parameters of mung bean seeds and optimization of discharging equipment [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(12): 45-52. | |
| 5 | 刘瑞, 李衍军, 刘忠军, 等. 包衣玉米种子离散元参数分析与标定[J]. 农业机械学报, 2021, 52(3): 112-118. |
| LIU Rui, LI Yanjun, LIU Zhongjun, et al. Analysis and calibration of discrete element parameters of coated maize seed [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(3): 112-118. | |
| 6 | 温翔宇, 袁洪方, 王刚, 等. 颗粒肥料离散元仿真摩擦因数标定方法研究[J]. 农业机械学报, 2020, 51(2): 115-122, 142. |
| WEN Xiangyu, YUAN Hongfang, WANG Gang, et al. Calibration method of friction coefficient of granular fertilizer by discrete element simulation [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(2): 115-122, 142. | |
| 7 | Li H Q, Zhang G C, Li X C, et al. Calibration of the discrete element method parameters in living juvenile Manila clam (Ruditapes philippinarum) and seeding verification [J]. AgriEngineering, 2021, 3(4): 894-906. |
| 8 | LOU Y Z, ZHANG G, LI X, et al. Experiment and calibration of contact parameters of Mactra veneriformis based on DEM [J]. Computational Particle Mechanics, 2025, 12(1): 313-326. |
| 9 | 董晓威. 垂直螺旋式水稻侧深施肥机理与装置参数研究[D]. 大庆: 黑龙江八一农垦大学, 2019. |
| DONG Xiaowei. Mechanism and parameters of vertical spiral rice deep-side fertilizing device [D]. Daqing: Heilongjiang Bayi Agricultural University, 2019. | |
| 10 | 黄伟, 李秀辰, 母刚, 等. 离心式滩涂贝类播苗装置设计与试验[J]. 大连海洋大学学报, 2022, 37(2): 320-328. |
| HUANG Wei, LI Xiuchen, MU gang, et al. Design and test of a centrifugal shellfish seeding device for tidal flat aquaculture [J]. Journal of Dalian Ocean University, 2022, 37(2): 320-328. | |
| 11 | 刘彩玲, 王亚丽, 宋建农, 等. 基于三维激光扫描的水稻种子离散元建模及试验[J]. 农业工程学报, 2016, 32(15): 294-300. |
| LIU Cailing, WANG Yali, SONG Jiannong, et al. Experiment and discrete element model of rice seed based on 3D laser scanning [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(15): 294-300. | |
| 12 | 李志良. 基于点云数据的真三维建模方法研究[D]. 太原: 太原理工大学, 2014. |
| LI Zhiliang. The true 3D modeling method based on point cloud data [D]. Taiyuan: Taiyuan University of Technology, 2014. | |
| 13 | 王庚祥, 马道林, 刘洋, 等. 多体系统碰撞动力学中接触力模型的研究进展[J]. 力学学报, 2022, 54(12): 3239-3266. |
| WANG Gengxiang, MA Daolin, LIU Yang, et al. Research progress of contact force models in the collision mechanics of multibody system [J]. Chinese Journal of Theoretical and Applied Mechanics, 2022, 54(12): 3239-3266. | |
| 14 | 刘羊, 宗望远, 马丽娜, 等. 采用高速摄影技术测定油葵籽粒三维碰撞恢复系数[J]. 农业工程学报, 2020, 36(4): 44-53. |
| LIU Yang, ZONG Wangyuan, MA Lina, et al. Determination of three-dimensional collision restitution coefficient of oil sunflower grain by high-speed photography [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(4): 44-53. | |
| 15 | 缪雨龙, 赵毅红, 袁仨, 等. 玉米种子离散元模型建立及参数标定[J]. 江苏农业科学, 2024, 52(18): 209-214. |
| 16 | 魏雨涵, 赵丽莹. 韭菜种子物性参数测定及离散元参数标定[J]. 南方农业, 2024, 18(13): 236-240. |
| 17 | 张宏建, 陈修波, 李宏立, 等. 控释肥颗粒群仿真接触参数标定与试验[J]. 农业机械学报, 2024, 55(6): 80-90. |
| ZHANG Hongjian, CHEN Xiubo, LI Hongli, et al. Simulated contact parameters calibration and experiment of controlled-release fertilizer particles [J]. Transactions of the Chinese Society for Agricultural Machinery, 2024,55(6): 80-90. | |
| 18 | 张国忠, 陈立明, 刘浩蓬, 等. 荸荠离散元仿真参数标定与试验[J]. 农业工程学报, 2022, 38(11): 41-50. |
| ZHANG Guozhong, CHEN Liming, LIU Haopeng, et al. Calibration and experiments of the discrete element simulation parameters for water chestnut [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(11): 41-50. | |
| 19 | 祝天荣, 田清华, 何琳, 等. 摩擦系数测试仪可靠性分析方法[J]. 机械设计与制造, 2014(5): 102-105. |
| ZHU Tianrong, TIAN Qinghua, HE Lin, et al. Methods on reliability analysis of friction coefficient test instrument [J]. Machinery Design & Manufacture, 2014(5): 102-105. | |
| 20 | 范珺. GB 10006与ASTM D 1894塑料薄膜摩擦系数测定方法的比较[J]. 中国包装, 2014, 34(5): 48-51. |
| 21 | ZHANG H B, LI P P, ZHANG H N, et al. Design and experiment of cone disk centrifugal shellfish seeding device [J]. Frontiers in Marine Science, 2023, 10: 1136844. |
| 22 | 朱惠斌, 李镕东, 白丽珍, 等. 不同含水率下水稻秸秆的离散元参数标定[J/OL]. 南京农业大学学报, 1-15[2025-03-15]. . |
| ZHU Huibin, LI Rongdong, BAI Lizhen, et al. Calibration of discrete meta-parameters of ricestraw at different water contents [J]. Journal of Nanjing Agricultural University, 1-15[2025-03-15]. . | |
| 23 | 樊成赛, 何瑞银, 施印炎, 等. 有机无机混合肥料离散元参数标定方法研究[J]. 南京农业大学学报, 2024, 47(2): 402-413. |
| FAN Chengsai, HE Ruiyin, SHI Yinyan, et al. Study on discrete element parameter calibration method for organic inorganic mixed fertilizers [J]. Journal of Nanjing Agricultural University, 2024, 47(2): 402-413. | |
| 24 | 李道亮, 刘畅. 人工智能在水产养殖中研究应用分析与未来展望[J]. 智慧农业(中英文), 2020, 2(3): 1-20. |
| LI Daoliang, LIU Chang. Recent advances and future outlook for artificial intelligence in aquaculture [J]. Smart Agriculture, 2020, 2(3): 1-20. | |
| 25 | 张志磊, 郭飞宏, 周炳洋, 等. 滩涂贝类采收设备自动驾驶滑移模型研究[J]. 智能化农业装备学报(中英文), 2025, 6(1): 81-90. |
| ZHANG Zhilei, GUO Feihong, ZHOU Bingyang, et al. Research on slip model of automatic driving of shellfish harvesting equipment in mudflat [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 81-90. |
| [1] | LÜ Qiuhui, ZHU Lixue, ZHANG Shi'ang, CHEN Yipeng, MAO Shun. Application status and trends of sensor technology in fruit picking robots [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 58-68. |
| [2] | WANG Kelin, LIU Longshen, CHEN Jinxin, LI Peng, OKINDA Cedric, SHEN Mingxia. Application and prospect of artificial intelligence in livestock and poultry farming robots [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 44-57. |
| [3] | ZHANG Jinguo, CAI Jianfeng, JIANG Rongrong, YU Shanshan, WANG Pengbo. Multi-task joint perception framework for autonomous navigation in orchard robotics [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 35-43. |
| [4] | WANG Yina, WANG Pengjun, CHEN Cong. Current status and trends of broiler welfare farming [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 105-110. |
| [5] | WANG Dezhi, WANG Yanxin, WANG Xiaochan, SHI Yinyan, ZHANG Yongnian. Management and harvesting technologies in agricultural robotics: Current status, challenges and future developments [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(2): 1-23. |
| [6] | ZHANG Zhilei, GUO Feihong, ZHOU Bingyang, XU Bin, WU Hao, MU Gang. Research on slip model of automatic driving of shellfish harvesting equipment in mudflat [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 81-90. |
| [7] | WU Qing, WEI Runxuan, ZHOU Le, YANG Hao, LIU Wanru, XU Hongmei. Lightweight fresh tea leaf recognition method based on improved YOLOv5s [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 1-14. |
| [8] | WANG Yongjian, DING Xiang, LI Hua, SAMUEL Mbugua Nyambura, LI Yuqing, GE Yanyan, QIU Shilong, FENG Xuebin. Design and experiment of STM32-based monitoring system for garlic combine harvester [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 15-24. |
| [9] | CAI Jiayi, LIU Shiwei, SHAN Longxiang, LIU Yong, SHEN Hongyi, WANG Qiaohua. Design and experiment of cracked egg sorting robot based on machine vision and YOLO v5 [J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(1): 41-50. |
| [10] | SUN Zhu, GU Wei, CUI Longfei, CAI Chen, CHEN Chen, ZHOU Qingqing, DING Suming, LAN Yubin, XUE Xinyu. Research status and development trends of key technologies for intelligent plant protection equipment [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 1-23. |
| [11] | ZHAO Zexing, WU Xiaopeng, WANG Yixin, YAN Xiaoli, HUANG Yuxiang, GAO Xiaojun. Research on question answering system for crop diseases and pests based on knowledge graph [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 39-50. |
| [12] | MA Zenghong, YUE Jiawen, YIN Cheng, ZHAO Runmao, CHANDA Mulongoti, DU Xiaoqiang. Visual navigation in orchard based on multiple images at different shooting angles [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 51-65. |
| [13] | ZHAO Lijun, JIA Yunfan, YIN Wenke, HUANG Hua, LI Xiang, LI Qiang. Design and experiment of a tracked weeding robot based on model predictive control [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 84-94. |
| [14] | WEI Huiling, LIANG Chengbin, WANG Jinhai, CHEN Mingyou, LUO Lufeng. Research progress of cable-driven flexible manipulator and its application in agricultural robots [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 95-106. |
| [15] | LI Shilong, XU Chenyi, WANG Nan, CAO Huini, YU Fenghua. Research on rice nitrogen unmanned aerial vehicle hyperspectral inversion based on BWO-ELM [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(3): 14-21. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||