ISSN 2096-7217 CN 32-1887/S2
Journal of Intelligent Agricultural Mechanization ›› 2024, Vol. 5 ›› Issue (4): 84-94.DOI: 10.12398/j.issn.2096-7217.2024.04.006
Previous Articles Next Articles
ZHAO Lijun1( ), JIA Yunfan1, YIN Wenke1, HUANG Hua1, LI Xiang2, LI Qiang1()
), JIA Yunfan1, YIN Wenke1, HUANG Hua1, LI Xiang2, LI Qiang1()
Received:2024-08-05
Revised:2024-09-23
Online:2024-11-15
Published:2024-11-15
Corresponding author:
LI Qiang
CLC Number:
ZHAO Lijun, JIA Yunfan, YIN Wenke, HUANG Hua, LI Xiang, LI Qiang. Design and experiment of a tracked weeding robot based on model predictive control[J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 84-94.
Add to citation manager EndNote|Ris|BibTeX
URL: http://znhnyzbxb.niam.com.cn/EN/10.12398/j.issn.2096-7217.2024.04.006
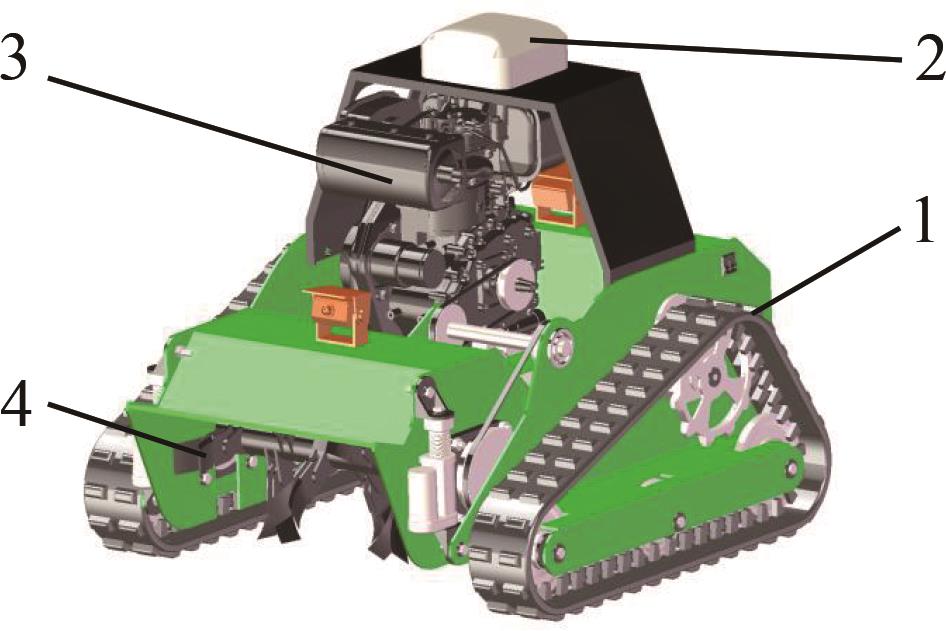
Figure 1 Overall 3D model
| 项目名称 | 参数 |
|---|---|
| 底盘重量/kg | 200 |
| 底盘总体尺寸/(mm×mm×mm) | 1 100×950×400 |
| 履带接地长度/mm | 800 |
| 履带宽度/mm | 145 |
| 轨距/mm | 600 |
| 履带节距/mm | 60 |
| 接地比压/kPa | 8.4 |
| 最大爬坡度/(°) | 30 |
| 跨沟宽度/mm | 400 |
| 越障高度/mm | 200 |
Table 1 Main parameters of crawler chassis
| 项目名称 | 参数 |
|---|---|
| 底盘重量/kg | 200 |
| 底盘总体尺寸/(mm×mm×mm) | 1 100×950×400 |
| 履带接地长度/mm | 800 |
| 履带宽度/mm | 145 |
| 轨距/mm | 600 |
| 履带节距/mm | 60 |
| 接地比压/kPa | 8.4 |
| 最大爬坡度/(°) | 30 |
| 跨沟宽度/mm | 400 |
| 越障高度/mm | 200 |

Figure 2 Composition of the weeding robot navigation system1.IMU
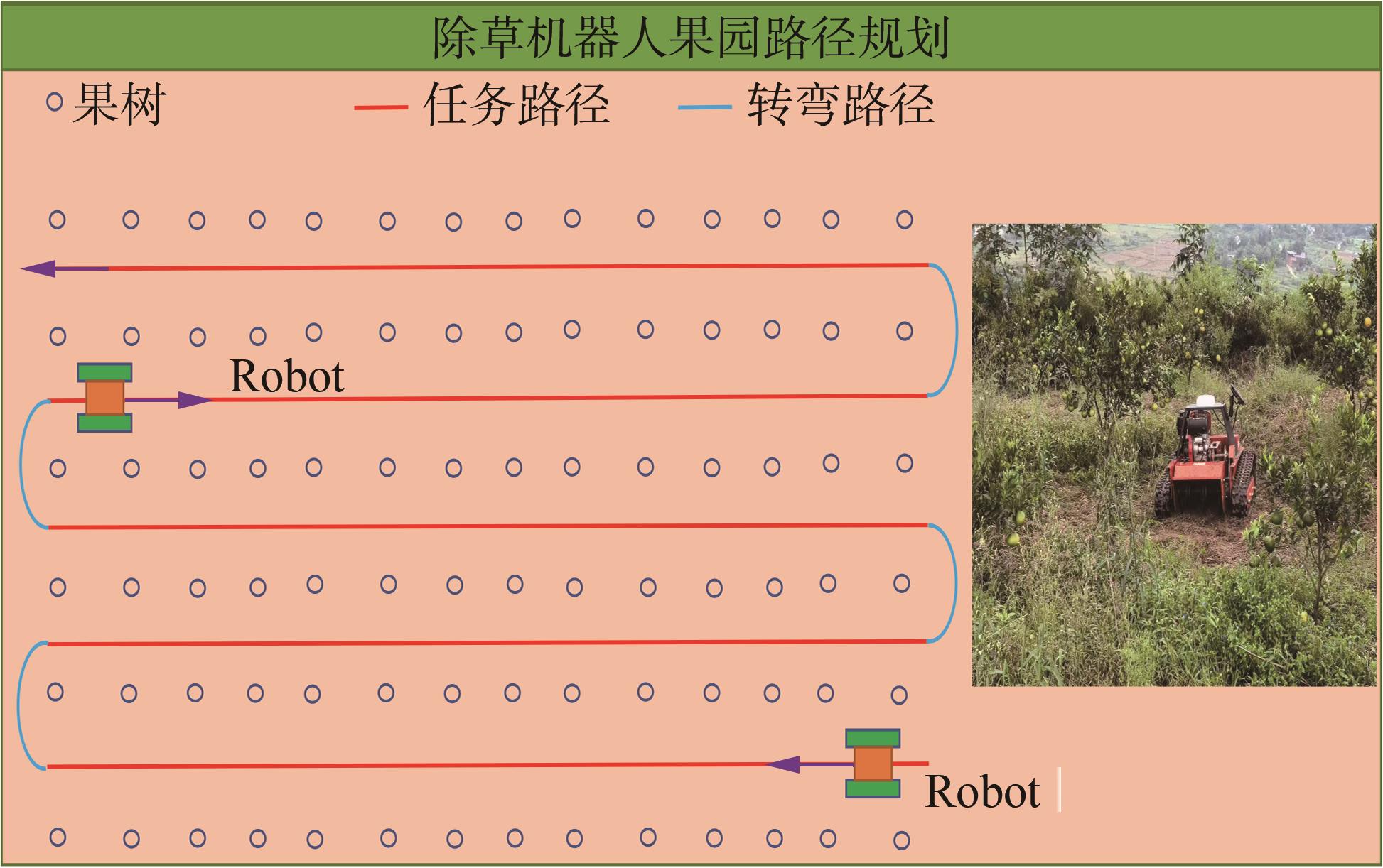
Figure 3 Orchard round-trip path planning diagram

Figure 4 Tracked robot model
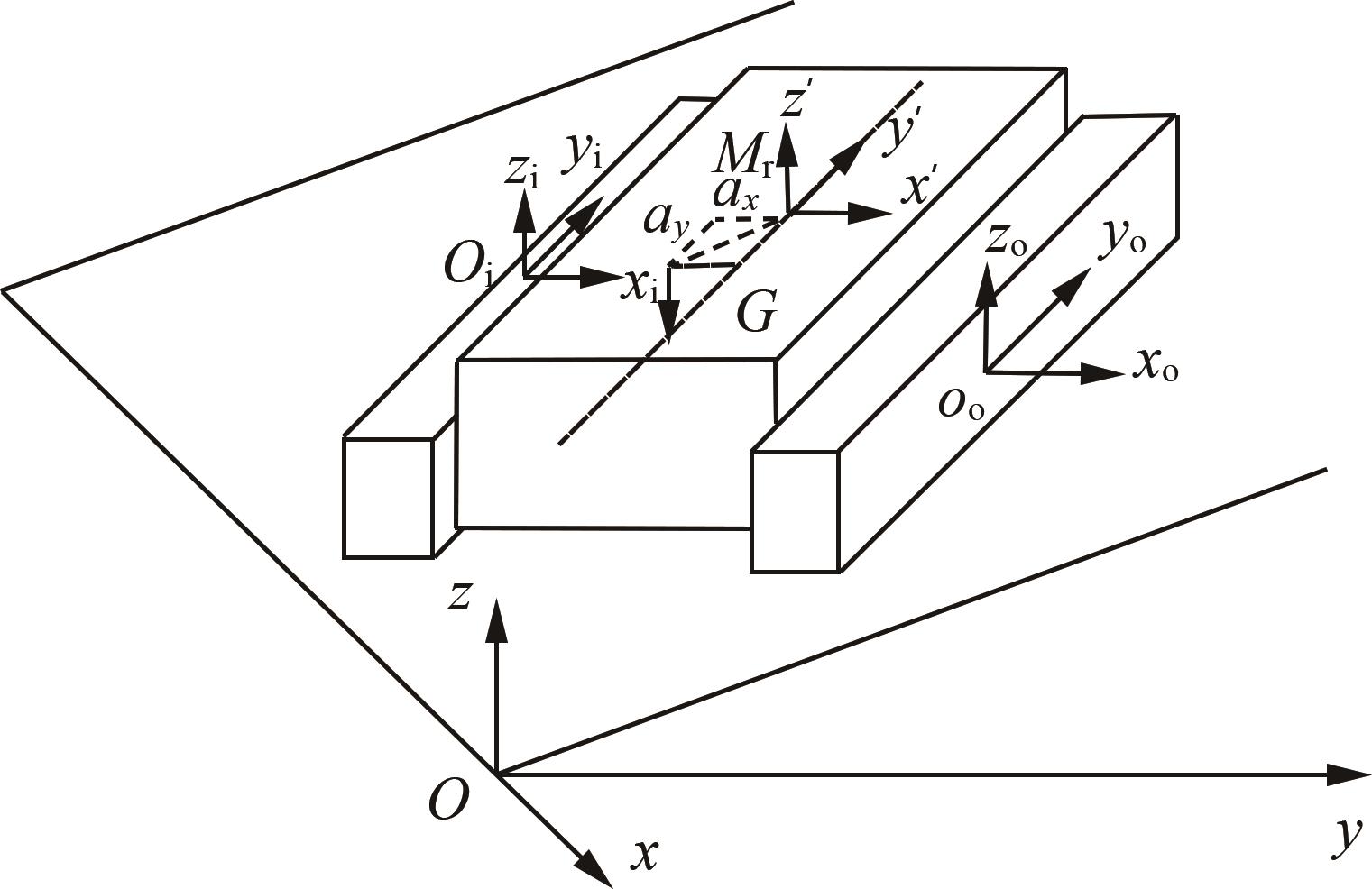
Figure 5 Vehicle slope analysis
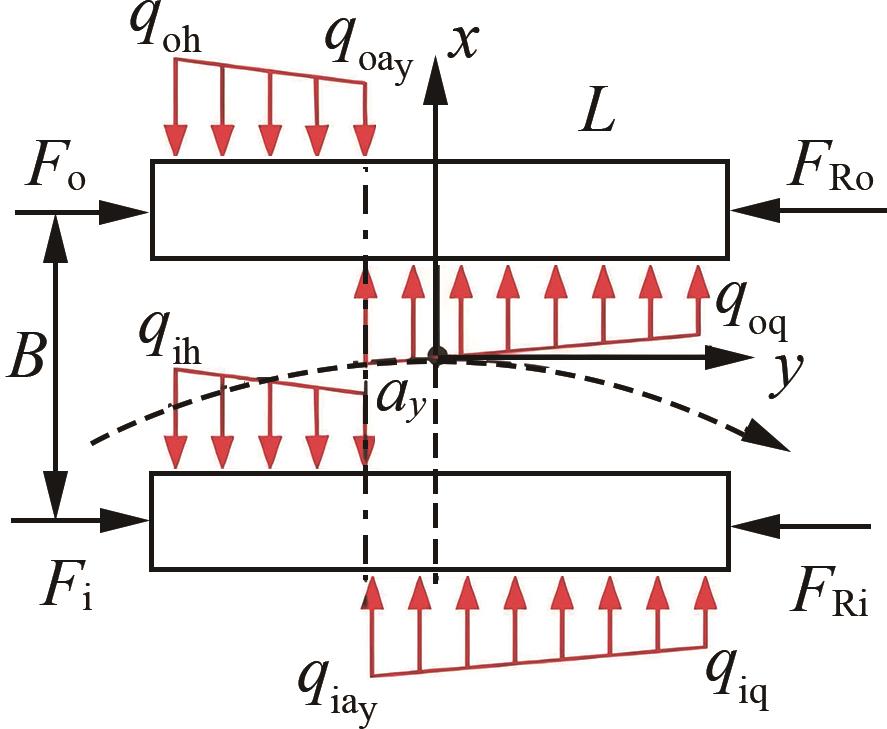
Figure 6 Distribution of transverse forces on the track parallel to the road surface
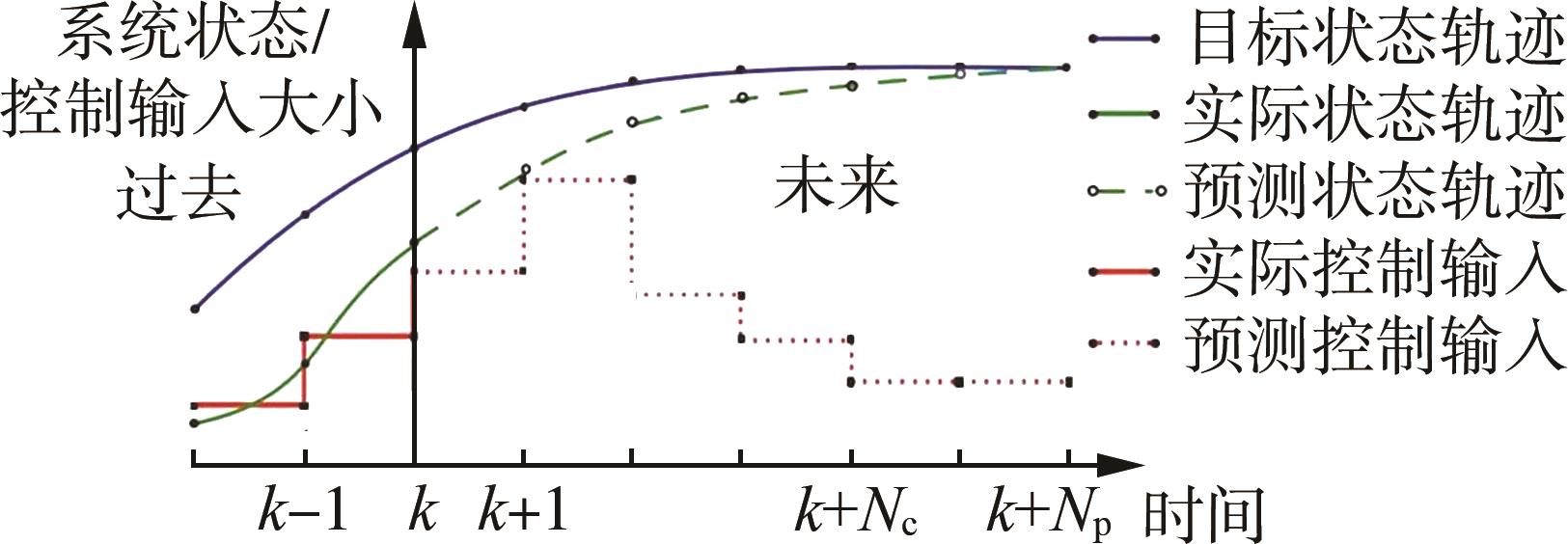
Figure 7 Schematic of model predictive control
Figure 8 Slope steering control strategy
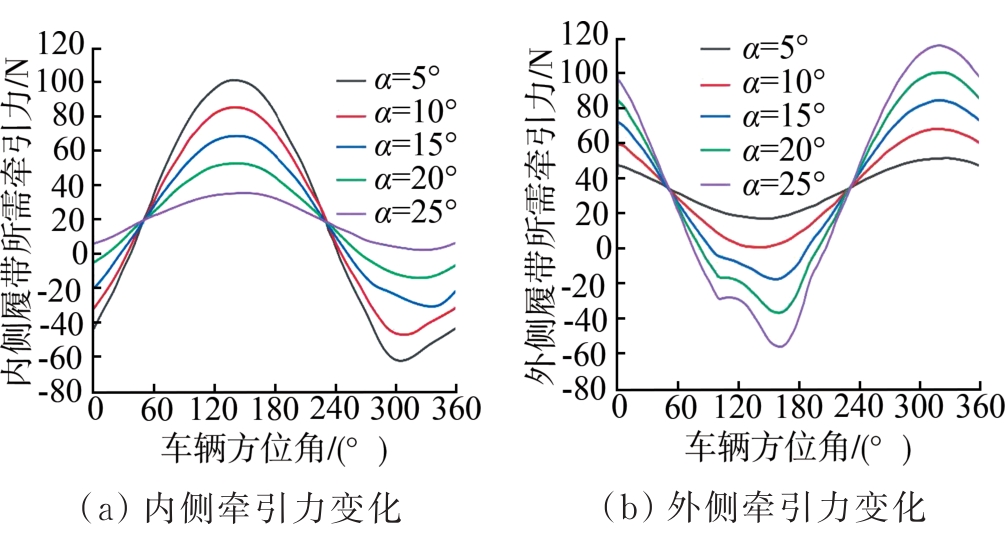
Figure 9 Traction trend at different slopes (R=3 m)
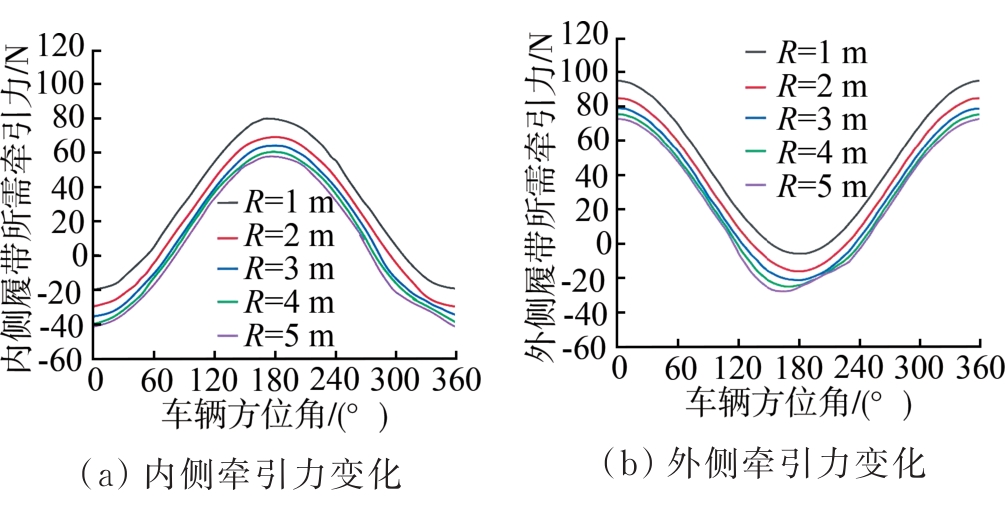
Figure 10 Traction trend changes under different steering radii (a=15°)
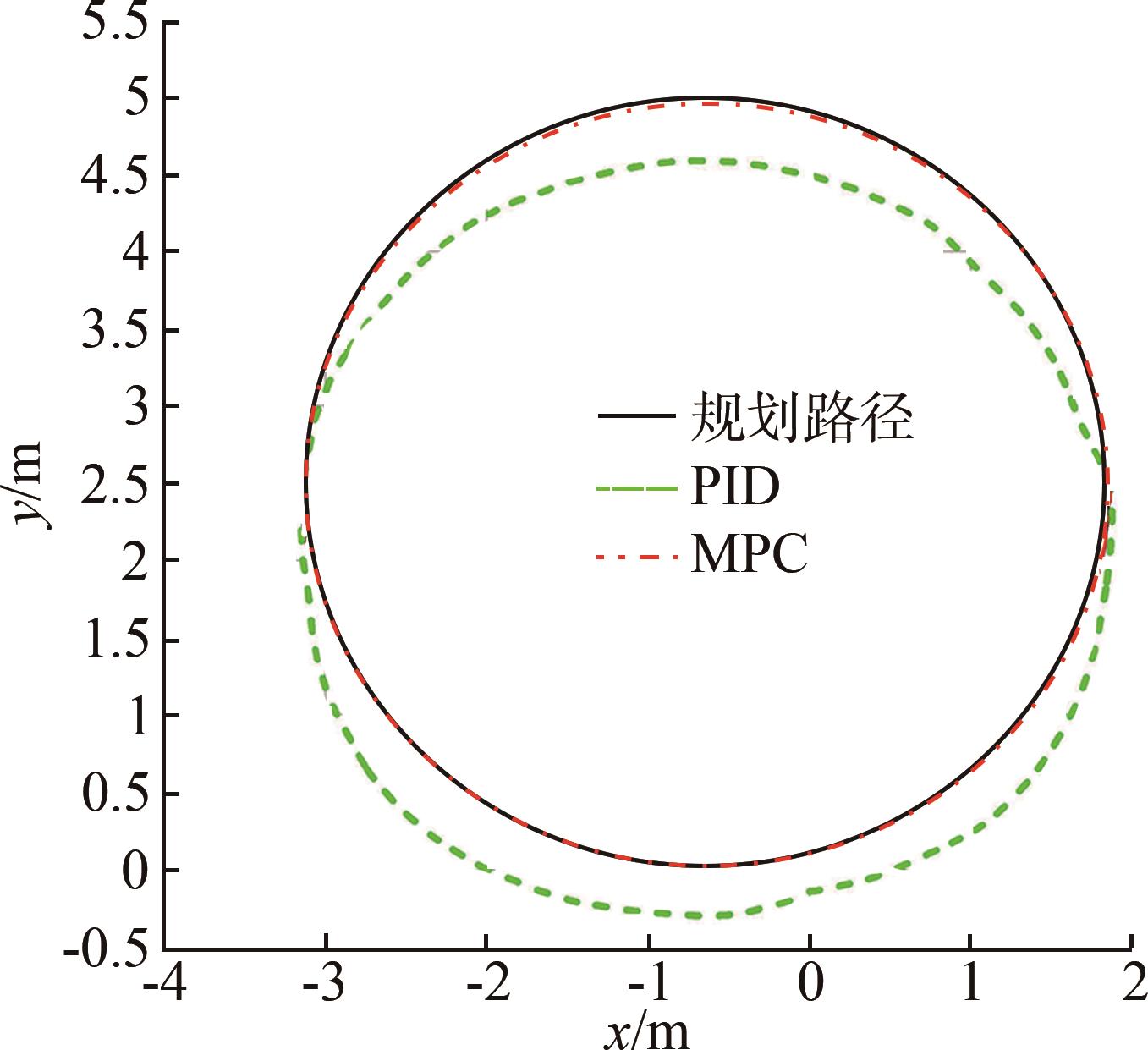
Figure 11 Turn-by-turn driving 2D path tracking
| 控制方法 | 最大误差/m | 平均误差/m | ||
|---|---|---|---|---|
| x方向 | y方向 | x方向 | y方向 | |
| PID | 0.231 5 | 0.756 3 | 0.063 7 | 0.425 8 |
| MPC | 0.192 3 | 0.401 5 | 0.014 5 | 0.062 6 |
Table 2 Positioning accuracy statistics
| 控制方法 | 最大误差/m | 平均误差/m | ||
|---|---|---|---|---|
| x方向 | y方向 | x方向 | y方向 | |
| PID | 0.231 5 | 0.756 3 | 0.063 7 | 0.425 8 |
| MPC | 0.192 3 | 0.401 5 | 0.014 5 | 0.062 6 |

Figure 12 Scenario for experiment

Figure 13 Uphill and downhill trajectory tracking error
| 上坡 | 坡度角5° | 坡度角15° | ||
|---|---|---|---|---|
| 最大误差/cm | 平均误差/cm | 最大误差/cm | 平均误差/cm | |
| PID | 6.92 | 2.32 | 19.86 | 12.21 |
| MPC | 1.31 | 3.21 | 8.52 | 5.89 |
Table 3 Comparison of uphill steering path tracking performance
| 上坡 | 坡度角5° | 坡度角15° | ||
|---|---|---|---|---|
| 最大误差/cm | 平均误差/cm | 最大误差/cm | 平均误差/cm | |
| PID | 6.92 | 2.32 | 19.86 | 12.21 |
| MPC | 1.31 | 3.21 | 8.52 | 5.89 |
| 下坡 | 坡度角5° | 坡度角15° | ||
|---|---|---|---|---|
| 最大误差/cm | 平均误差/cm | 最大误差/cm | 平均误差/cm | |
| PID | 6.73 | 3.45 | 18.21 | 11.73 |
| MPC | 2.31 | 1.15 | 5.72 | 4.25 |
Table 4 Comparison of downhill steering path tracking performance
| 下坡 | 坡度角5° | 坡度角15° | ||
|---|---|---|---|---|
| 最大误差/cm | 平均误差/cm | 最大误差/cm | 平均误差/cm | |
| PID | 6.73 | 3.45 | 18.21 | 11.73 |
| MPC | 2.31 | 1.15 | 5.72 | 4.25 |
| 杂草面积/m2 | 漏除面积/m2 | 除草率/% | ||
|---|---|---|---|---|
| 区域1 | 区域2 | 合计 | ||
| 30.00 | 0.32 | 0.38 | 0.70 | 97.77 |
| 20.00 | 0.16 | 0.22 | 0.38 | 98.10 |
| 30.00 | 0.28 | 0.35 | 0.63 | 97.90 |
Table 5 Measurement result of weeding rate
| 杂草面积/m2 | 漏除面积/m2 | 除草率/% | ||
|---|---|---|---|---|
| 区域1 | 区域2 | 合计 | ||
| 30.00 | 0.32 | 0.38 | 0.70 | 97.77 |
| 20.00 | 0.16 | 0.22 | 0.38 | 98.10 |
| 30.00 | 0.28 | 0.35 | 0.63 | 97.90 |

Figure 14 Effect of weeding before and after
| 1 | 任嘉欣. 覆盖作物多样性的地上部生产力及其对柑橘园土壤特性的影响[D]. 重庆: 西南大学, 2023. |
| REN Jiaxin. Aboveground productivity of cover crop diversity and its effects on soil properties in citrus orchards [D]. Chongqing: Southwest University, 2023. | |
| 2 | ZHANG Z, LI R H, ZHAO C, et al. Reduction in weed infestation through integrated depletion of the weed seed bank in a rice-wheat cropping system [J]. Agronomy for Sustainable Development, 2021, 41(1): 10. |
| 3 | 温翔宇. 丘陵山区果园机械化装备发展现状分析与展望[J]. 广东科技, 2021, 30(2): 34-38. |
| 4 | 贠鑫, 吕猛, 王文彬, 等. 果园除草机研究现状与发展趋势[J]. 农业工程, 2020, 10(1): 18-21. |
| YUN Xin, Meng LÜ, WANG Wenbin, et al. Research status and development trend of orchard weeder [J]. Agricultural Engineering, 2020, 10(1): 18-21. | |
| 5 | 赵静娟, 杨艳萍, 郑怀国, 等. 全球农业机器人研发趋势预测[J]. 智能化农业装备学报(中英文), 2021, 2(1): 28-35. |
| ZHAO Jingjuan, YANG Yanping, ZHENG Huaiguo, et al. Global agricultural robotics research and development: Trend forecasts [J]. Journal of Intelligent Agricultural Mechanization(in Chinese and English), 2021, 2(1): 28-35. | |
| 6 | 张漫, 季宇寒, 李世超, 等. 农业机械导航技术研究进展[J]. 农业机械学报, 2020, 51(4): 1-18. |
| ZHANG Man, JI Yuhan, LI Shichao, et al. Robot research progress of agricultural machinery navigation technology [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(4): 1-18. | |
| 7 | 赵春江, 范贝贝, 李瑾, 等. 农业机器人技术进展、挑战与趋势[J]. 智慧农业(中英文), 2023, 5(4): 1-15. |
| ZHAO Chunjiang, FAN Beibei, LI Jin, et al. Agricultural robots: Technology progress, challenges and trends [J]. Smart Agriculture, 2023, 5(4): 1-15. | |
| 8 | 高勇, 陈中武, 李沐桐, 等. 果园除草机器人研究现状与展望[J]. 现代农业装备, 2023, 44(5): 2-8, 29. |
| GAO Yong, CHEN Zhongwu, LI Mutong, et al. Research status and prospects of orchard weeding robots [J]. Modern Agricultural Equipment, 2023, 44(5): 2-8, 29. | |
| 9 | 闫全涛, 李丽霞, 邱权, 等. 小型农田原状土样采集机器人系统研发与测试[J]. 智能化农业装备学报(中英文), 2024, 5(1): 12-22. |
| YAN Quantao, LI Lixia, QIU Quan, et al. Development and test of a small robotic system for in-field undisturbed soil sampling [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(1): 12-22. | |
| 10 | 王焯轩, 王立辉, 许宁徽, 等. 智能收获机器人侧滑及滞后性控制策略研究[J]. 智能化农业装备学报(中英文), 2022, 3(2): 37-44. |
| WANG Zhuoxuan, WANG Lihui, XU Ninghui, et al. Research on the control strategy of sideslip and hysteresis of intelligent harvesting robot [J]. Journal of Intelligent Agricultural Mechanization, 2022, 3(2): 37-44. | |
| 11 | 郑和, 李紫琪, 单以才, 等. 农田机械除草技术与装备研究现状与发展趋势[J/OL]. 南京农业大学学报, 1-13[2024-08-14]. . |
| ZHENG He, LI Ziqi, SHAN Yicai, et al. Current status and development trends of agricultural machinery weeding technologies and equipment [J/OL]. Journal of Nanjing Agricultural University, 1-13[2024-08-14]. . | |
| 12 | QUAN L Z, JIANG W, LI H L, et al. Intelligent intra-row robotic weeding system combining deep learning technology with a targeted weeding mode [J]. Biosystems Engineering, 2022, 216: 13-31. |
| 13 | ZHANG Q, XIA H, HUANG X G. The structure and realization of a compact weeding robot in stamping mode for paddy fields [M]// Lecture Notes in Electrical Engineering. Berlin, Heidelberg: Springer Berlin Heidelberg, 2011: 205-212. |
| 14 | 李江龙, 卢智琴, 鲍义东, 等. 履带式除草机器人高地隙移动平台机构优化设计[J]. 农业技术与装备, 2022(5): 22-26. |
| LI Jianglong, LU Zhiqin, BAO Yidong, et al. Mechanism optimization design of crawler weeding robot with high clearance moving platform [J]. Agricultural Technology & Equipment, 2022(5): 22-26. | |
| 15 | 刘永平, 许杰, 廖福林, 等. 新型果园除草机器人结构设计与切割仿真分析[J]. 农机化研究, 2020, 42(4): 28-32, 39. |
| LIU Yongping, XU Jie, LIAO Fulin, et al. Structural design and cutting simulation analysis of new orchard weeding robot [J]. Journal of Agricultural Mechanization Research, 2020, 42(4): 28-32, 39. | |
| 16 | HUANG P C, ZHU L X, ZHANG Z G, et al. An end-to-end learning-based row-following system for an agricultural robot in structured apple orchards [J]. Mathematical problems in engineering, 2021: 6221119. |
| 17 | 贺庆, 冀杰, 冯伟, 等. 割草机器人自适应时域MPC路径跟踪控制方法[J]. 智慧农业(中英文), 2024, 6(3): 82-93. |
| HE Qing, JI Jie, FENG Wei, et al. Adaptive time horizon MPC path tracking control method for mowing robot [J]. Smart Agriculture, 2024, 6(3): 82-93. | |
| 18 | 赵智宇, 朱立成, 周利明, 等. 丘陵果园除草机器人底盘系统设计与试验[J]. 农业机械学报, 2022, 53(S1): 48-57. |
| ZHAO Zhiyu, ZHU Licheng, ZHOU Liming, et al. Design and experiment of chassis control system for weeding robot in hilly orchard [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(S1): 48-57. | |
| 19 | 翁盛槟, 吴继团, 林晓亮, 等. 基于模糊控制的除草机器人自主导航系统研究[J]. 机械制造与自动化, 2022, 51(5): 152-154, 158. |
| WENG Shengbin, WU Jituan, LIN Xiaoliang, et al. Research on autonomous navigation system of weeding robot based on fuzzy control [J]. Machine building & automation, 2022, 51(5): 152-154, 158. | |
| 20 | 冀杰, 贺庆, 赵立军, 等. 除草机器人自适应快速积分终端滑模跟踪控制技术[J]. 农业机械学报, 2023, 54(6): 55-64. |
| JI Jie, HE Qing, ZHAO Lijun, et al. Adaptive fast integrating terminal sliding mode tracking control technique for weeding robot [J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(6): 55-64. | |
| 21 | 张文莉, 陈树人, 褚德宏. 除草机器人研究现状与趋势[J]. 农业装备技术, 2015, 41(2): 6-10. |
| ZHANG Wenli, CHEN Shuren, Zhu Dehong. Research review on field weeding robot [J]. Agricultural Equipment & Technology, 2015, 41(2): 6-10. | |
| 22 | 宋德平, 王成, 孙冬霞, 等. 基于北斗导航的智能棉花播种机设计与试验[J]. 智能化农业装备学报(中英文), 2021, 2(1): 44-50. |
| SONG Deping, WANG Cheng, SUN Dongxia, et al. Design and test of intelligent cotton planter based on BeiDou navigation [J]. Journal of Intelligent Agricultural Mechanization(in Chinese and English), 2021, 2(1): 44-50. | |
| 23 | GUAN Z H, LI Y, MU S L, et al. Tracing algorithm and control strategy for crawler rice combine harvester auxiliary navigation system [J]. Biosystems Engineering, 2021, 211: 50-62. |
| 24 | 闫清东, 张连第, 赵毓芹. 坦克构造与设计(下册) [M]. 北京: 北京理工大学出版社, 2007. |
| 25 | ZENG G, GAI J T, HAN Z D, et al. The study of steering on ramp based on electric tracked vehicle[C]//SAE Technical Paper Series. 400 Commonwealth Drive, Warrendale, PA, United States: SAE International, 2020. |
| 26 | KIM H, KIM J, HAN K, et al. 1D modeling considering noise and vibration of vehicle window brushed DC motor [J]. Applied sciences, 2022, 12(22): 11405. |
| 27 | 张亮修, 吴光强, 郭晓晓. 自主车辆线性时变模型预测路径跟踪控制[J]. 同济大学学报(自然科学版), 2016, 44(10): 1595-1603. |
| ZHANG Liangxiu, WU Guangqiang, GUO Xiaoxiao. Path tracking using linear time-varying model predictive control for autonomous vehicle [J]. Journal of Tongji University (Natural Science), 2016, 44(10): 1595-1603. | |
| 28 | 曾根, 王伟达, 盖江涛, 等. 双侧电机耦合驱动履带车辆斜坡转向控制策略[J]. 兵工学报, 2021, 42(10): 2189-2195. |
| ZENG Gen, WANG Weida, GAI Jiangtao, et al. Steering on ramp control strategy of double motor coupling drive transmission for tracked vehicle [J]. Acta Armamentarii, 2021, 42(10): 2189-2195. | |
| 29 | 王平, 毛克彪, 郭中华, 等. GPS/北斗双模接收机在精细农业中的应用分析[J]. 农业展望, 2021, 17(12): 150-155. |
| WANG Ping, MAO Kebiao, GUO Zhonghua, et al. Application analysis of GPS/BD dual-mode receiver in precision agriculture [J]. Agricultural Outlook, 2021, 17(12): 150-155. |
| [1] | MA Zenghong, YUE Jiawen, YIN Cheng, ZHAO Runmao, CHANDA Mulongoti, DU Xiaoqiang. Visual navigation in orchard based on multiple images at different shooting angles [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(4): 51-65. |
| [2] | FENG Shuang, ZHANG Zhaoguo, SUN Lianzhu, WANG Fa'an, XIE Kaiting. Research on deflection angle measurement system of tractor guide wheel based on GNSS/INS [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(2): 33-41. |
| [3] | LIU Yang, LIU Yuyang, CHEN Jiangchun, LI Jingbin, LIN Xiaowei, LIN Guangzhao. Research status and trend of key technologies of standardized orchard multi-functional operation platform [J]. Journal of Intelligent Agricultural Mechanization, 2024, 5(1): 31-39. |
| [4] | CUI Xinyu, CUI Bingbo, MA Zhen, HAN Yi, ZHANG Jianxin, WEI Xinhua. Integration of geometric-based path tracking controller and its application in agricultural machinery automatic navigation [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 24-31. |
| [5] | LU Mengyuan, WANG Tianyi, CHEN Xinchang, ZHANG Yuzhuo, GONG Zeqi, ZHANG Xingshan. Simulation research on cooperative flight model of UAV formation based on ROS and PX4 [J]. Journal of Intelligent Agricultural Mechanization, 2023, 4(3): 32-41. |
| [6] | Zhang Lei, Liu Yiting, Chen Guangming, Li Peijuan. Research on navigation and rectification of inspection robot based on ultrasonic sensor [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(2): 64-70. |
| [7] | Han Yu, Song Zhiyu, Chen Qiaomin. Design and experiment of 4CJ-1200F intelligent tea plucking machine [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(1): 1-6. |
| [8] | Pei Fengque , Yang Kaiwei , Wang Miao , Tong Yifei. Analysis of application status of intelligent manufacturing in agricultural machinery [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(1): 7-19. |
| [9] | Zhang Longmei, Liu Gangwei, Qi Yandong, Yang Tengxiang, Jin Chengqian. Research progress on key technologies of agricultural machinery unmanned driving system [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2022, 3(1): 27-36. |
| [10] | Qihao Wan, Ku Bu, Zhi Xing. Development of cloud intelligent sharing system based on Beidou agricultural machinery operation* [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2021, 2(1): 51-56. |
| [11] | Jia You, Shenzhong Du, Changjie Han, Wei Qiu, Xiu Wang. Design and test of chemical pesticide recovery system for self-propelled sprayer* [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2020, 1(2): 34-43. |
| [12] | Xiwen Luo. Artificial intelligence and plant protection mechanization [J]. Journal of Intelligent Agricultural Mechanization (in Chinese and English), 2020, 1(1): 1-6. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||